1
Изобретение относится к приборостроению и может использоваться при мультиплицировании изображения с большой точностью, например при серийном производстве интегральных схем.
Известен фотоштамп, состояший из основания, двухкоординатного столика, выполненного в виде вспомогательной и рабочей кареток, механизмов перемешения рабочей каретки, следяшей системы для устранения погрешности положения рабочей каретки с оптическим датчиком и механизмами микроперемешений.
Недостаток этого фотоштампа состоит в том, что он или не обладает достаточной точностью, или представляет собой сложную конструкцию.
Цель изобретения - упрошение конструкции и повышение воспроизводимости (0,1 - 0,2 мкм) положения мультиплицируемых кадров по двум координатам в горизонтальной плоскости при постоянстве высоты не грубее 1 мкм - достигается тем, что фотоштамп снабжен двумя наборами концевых мер для фиксации положения рабочей каретки по двум коордипатам и кинематически связанными с ними механизмами последовательной установки концевых мер, при этом концевые меры через промежуточные прижимы взаимодействуют с рабочей кареткой, установленной на основании и снабженной механизмами периодического отвода ее от концевых мер, а оптический датчик выполнен в виде эталонной решетки, установленной на рабочей каретке.
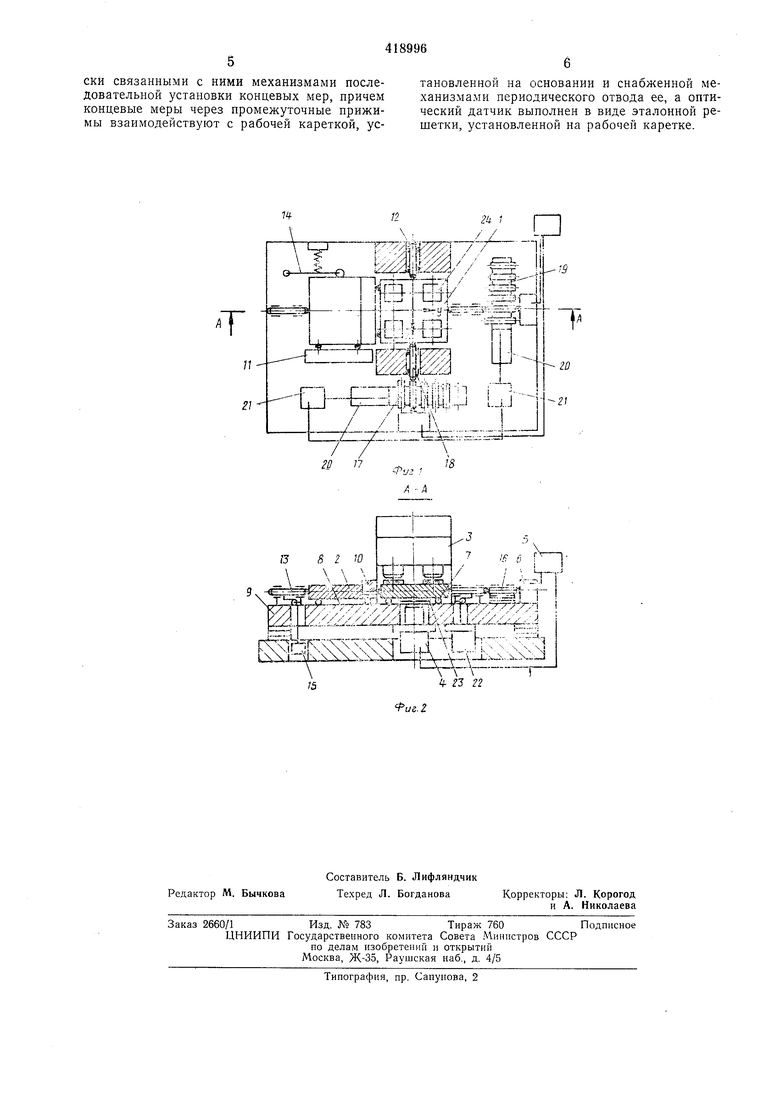
На фиг. 1 изображен предлагаемый фотоштамп без проекционной системы, в плане; на фиг. 2 - разрез по А-А на фиг. 1.
Фотоштамп содержит двухкоординатный столик, выполненный в виде рабочей каретки
1 и вспомогательной каретки 2, проекционную систему 3 и следяшую систему, содержащую двухкоординатный микроскоп 4, связанный через электронные блоки 5 управления с механизмами 6 микроперемещений - упорами.
Особенностью двухкоординатного столика является то, что в нем рабочая каретка 1 и вспомогательная каретка 2 установлены шариковыми опорами 7 на опорную плоскость 8 основания 9. Это позволяет использовать высокоточные нанравляющие для ориентации стола по двум координатам в горизонтальной плоскости.
Прецизионные направляющие 10 перемещения рабочей каретки по координате X выполнены на вспомогательной каретке, а прецизионные направляющие И совместного перемещения кареток 1 и 2 по координате У - на основании 9. Силовое замыкание между направляющими 10 и 11 и каретками 1 и 2 осуществляется элементами 12-14.
Механизм 15 перемещения кареток 1 и 2 по оси У условно изображен в виде груза, механизм перемещения каретки 1 по оси X имеет аналогичную конструкцию.
Особенностью фотощтампа является наличие двух наборов концевых мер 16 и 17, фиксирующих через промежуточные прижимы 18 рабочую каретку в заданных дискретных положениях по двум координатам. Концевые меры каждого набора устанавливаются в корпусах 19, кинематически связанных с щаговыми механизмами 20 для последовательной установки концевых мер, управляемыми программными устройствами 21. Промежуточные пружины 18 связаны с механизмами периодического отвода рабочей каретки 1 от концевых мер 16, 17 (один из этих механизмов 22 условно изображен на фиг. 1 в виде блока).
В качестве оптического датчика следящей системы использована эталонная решетка 23, которая закреплена на рабочей каретке 1 в поле зрепия микроскопа 4; шаг рещетки 23 по обеим координатам соответствует наимепьщей разности длин концевых мер, используемых в соответствующем наборе. Изготавливаемые фотошаблоны 24, число которых определяется числом каналов проекционной системы 3, устанавливаются на рабочей каретке 1.
Работа фотощтампа но мультиплицированию изображений негативов, установленных в проекционной системе 3, заключается в перемещении рабочей каретки с определенным щагом из нулевого ноложения (верхний левый угол, фиг. 1) по осям X и Y. При этом экспонирование кадра выполняется с помощью фотозатвора, установленного в проекционной головке, при фиксированном положении столика.
Перемещение столика производится в такой последовательности. Механизм 22 отвода кареток через промежуточный прижим 18 отводит каретки 1 и 2 назад по оси У на небольшую величину. При отведенных каретках программпое устройство 21 выдает команду на шаговый механизм 20, который устанавливает в рабочее положение следующую концевую меру 16. После этого механизм 22 отвода кареток автоматически отключается, и механизм 15 перемещает каретки 1 и 2 до момента, когда промежуточпый прижим 18 подходит к установленной концевой мере. , Благодаря тому, что в используемом двухкоординатном столике рабочая каретка 1 установлена на основание, а вспомогательная каретка 2 не является несущей, достигается значительное повыщение стабильности положения фотошаблонов 24 по высоте в процессе перемещения кареток 1 и 2, т. е. высокое качество фотощаблонов обеспечивается без применения дополнительных систем корректировки положения по высоте. Одновременно появляется возможность использования шариковых направляющих, что в сочетании с уменьшением массы птолика обеспечивает легкость хода кареток.
Это способствует повыщению надежности работы и воспроизводимости положения рабочей каретки 1 при ее установке на концевые меры.
При наличии остаточной погрешности положения рабочей каретки при установке ее на концевую меру 16, соответствующий штрих на эталонной решетке 23 будет смещен с оптической осп фотоэлектрического микроскопа 4,
который выдает соответствующий сигнал рассогласования в электронный блок 5 управления. Блок управления выдает команду на механизм 6 микроперемещений, настраивающий положение концевой меры 16 до получения нулевого сигнала рассогласования. Благодаря использованию набора концевых мер, диапазон работы механизма микроперемеодений не превыщает 1 мкм, что позволяет обеспечить точность отслеживания 0,1 -
0,2 мкм.
Так как оптическая ось фотоэлектрического микроскопа 4 совмепюна с осью проекционной системЕэ 3, на опшбку положения фотошаблонов практически не влияет разворот
столика вокруг вертикальной оси, что дополнительно повышает воспроизводимость положения кадров.
При точно установленной рабочей каретке производится экспонирование, после чего
цикл работы фотоштампа повторяется вдоль всей строки по координате У. После этого каретки 1 и 2 столика возвращаются в первоначальное положение. Аналогично рабочая каретка перемещается на один щаг по коордипате X и далее - по координате Y. После экспопирования последнего кадра по обеим координатам каретки столика возвращаются в нулевое положение. Использование наборов сменных концевых
мер в сочетании с программным устройством позволяет осуществлять различные режимы автоматического перемещения рабочей каретки (через 1, 2, 3 мм и т. д.), быстрое перемещение каретки на 20-30 мм при сохранении
постоянной высокой воспроизводимости ее положения, которое каждый раз определяется одной парой концевых мер.
Предмет изобретения
Многопозиционный фотоштамп, например для изготовления интегральных схем, состоящий из основания, двухкоординатного столика,
выполненного в виде вспомогательной и рабочей кареток, механизмов перемещения рабочей каретки, следящей системы для устранения погрешности положения рабочей каретки с оптическим датчиком и механизмами микроперемещений, отличающийся тем, что, с целью упрощения конструкции и повышения воспроизводимости положения кадров фотошаблонов, он снабжен двумя наборами концевых мер для фиксации положения рабочей
каретки по двум координатам и кинемэтическй связанными с ними механизмами последовательной установки концевых мер, причем концевые меры через промежуточные прижимы взаимодействуют с рабочей кареткой, установленной на основании и снабженной механизмами периодического отвода ее, а оптический датчик выполнен в виде эталонной решетки, установленной на рабочей каретке.
| название | год | авторы | номер документа |
|---|---|---|---|
| Микроманипулятор | 1972 |
|
SU441689A1 |
| Микрофотонаборное устройство для изготовления фотошаблонов | 1972 |
|
SU447664A1 |
| ВСЕСОЮЗНАЯ П1ТЕЙТ^П-Г^:^;-'>&'?'!:П[-;БИБЛИОт:::кА | 1972 |
|
SU352424A1 |
| Фотокоординатограф | 1984 |
|
SU1247820A1 |
| УСТРОЙСТВО ДЛЯ ДВУСТОРОННЕГО СОВМЕЩЕНИЯ РИСУНКОВ ПОДЛОЖКИ С РИСУНКАМИ ФОТОШАБЛОНОВ | 1971 |
|
SU414142A1 |
| УСТРОЙСТВО ПЕРЕМЕЩЕНИЯ, СОВМЕЩЕНИЯ И ПОЗИЦИОНИРОВАНИЯ | 2000 |
|
RU2160884C1 |
| Устройство проекционного экспонирования промежуточных фотооригиналов | 1984 |
|
SU1267343A1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ПЕРИОДИЧЕСКИХ МАГНИТНЫХ ПОЛЕЙ И ПОЛУЧЕНИЯ ИХ РАСПРЕДЕЛЕНИЙ В ПРОСТРАНСТВЕ И ВО ВРЕМЕНИ | 2000 |
|
RU2174235C1 |
| Устройство для разбивочных работ в строительстве | 1984 |
|
SU1224583A1 |
| Предметный столик растрового электронного микроскопа | 1987 |
|
SU1522318A1 |
П
/ .1 и
V//AW- //A / . - о . / tizr; 11 -ГП -d-Т-:±.-ч /
- -7-Чт
, L..-;-:.,
LJ- ттш
LiJ--tZiiii ii{iliti: -i-J i-lj--j
f/
Z/ /
Ф, SSSlU yE::iS:
2Ц. ; / / . / /l
-,9
JlB-|% Шг
1
b1ir:E 4
I i Г-:-I I .-i- - - - -n4iiГТ
iD
ПМ;1„;.-.-;.;-, .--J-. -2
/ /cx-.J-J
J ::::- ::-- r.
A -A
