1 . 1 Изобретение относится к энергетической, химической и пищевой промышленности и может найти широкое, при-, менение при управлении, технологическими процессами и машинами.
Цель изобретения - повышение показателей качества регулирования системы,.
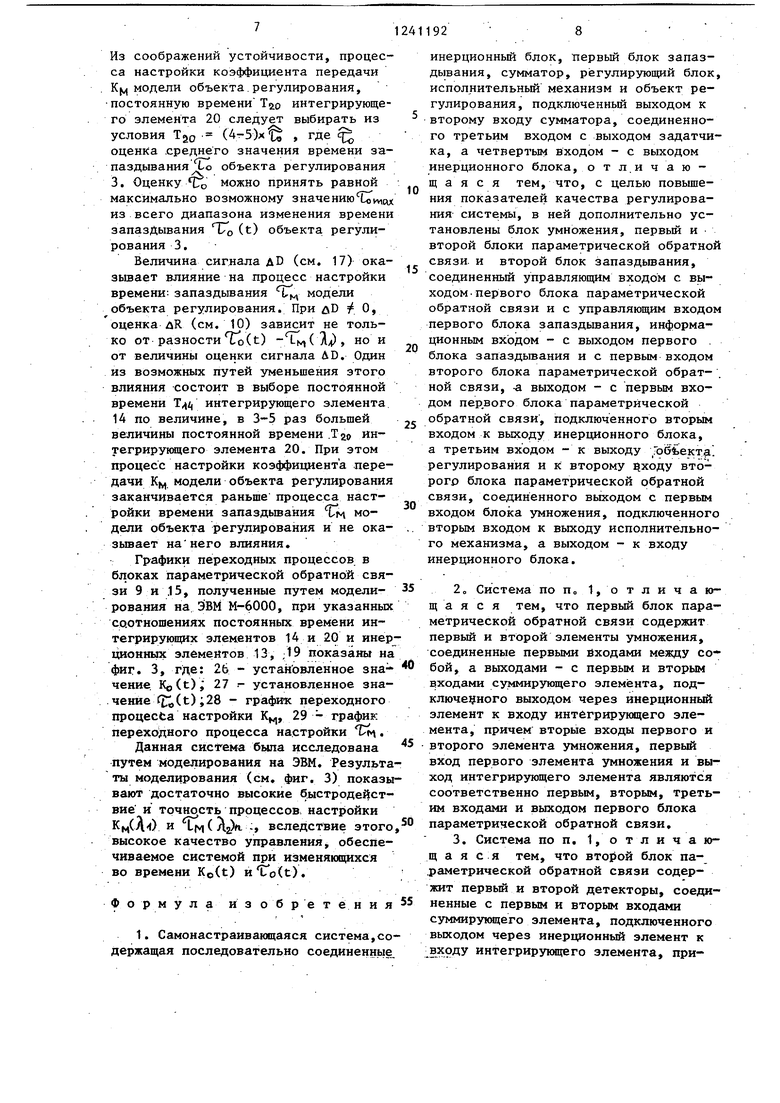
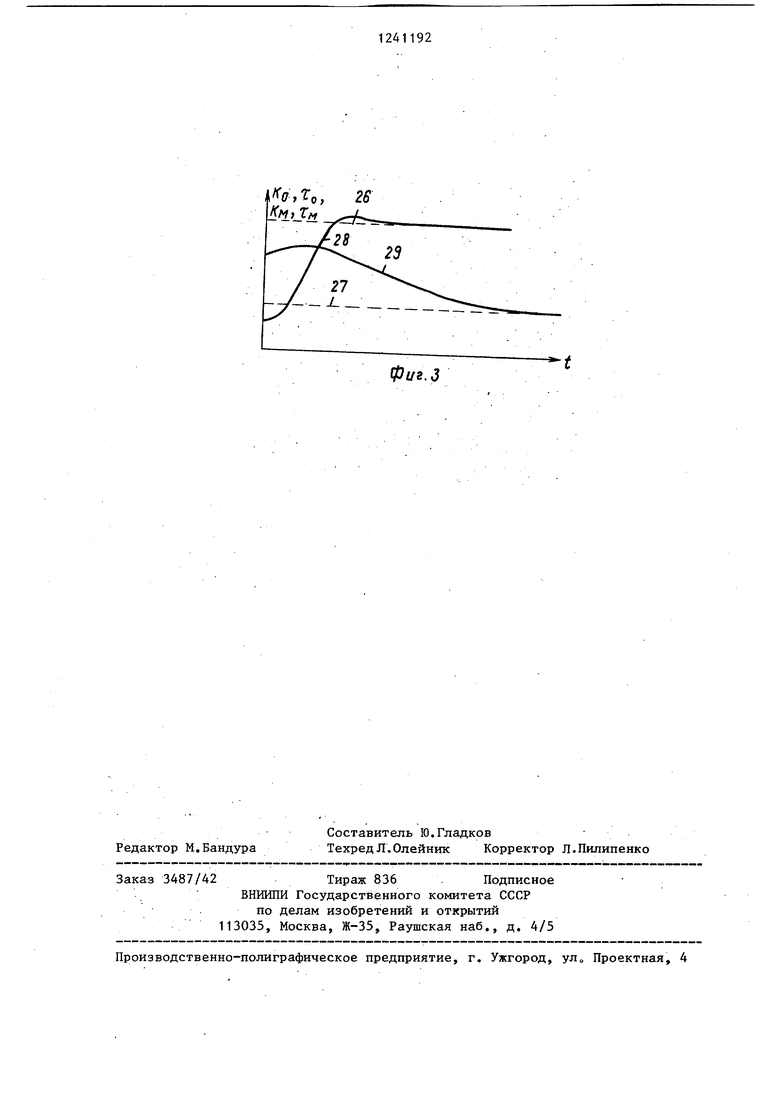
На фиг. 1 представлена структурная схема системы; на фиг. 2 - гра- фики, поясняющие принцип действия первого блока параметрической обрат- гой, связи, на фиг. 3 - графики, пояс- няющие принцип действ ия второго блока параметрической обратной связи.
Самонастраивающаяся система содержит регулирующий блок 1, исполнительный механизм 2, объект регулирования 3, сумматор 4, инерционный блок 5, первый блок запаздывания 6, блок ум- ножения 7, второй блок запаздывания 8, первьй блок параметрической, обратной связи 9, первый и второй элементы умножения 10 и 11, суммирующий элемент 12, инерционный элемент. 13, интегрирующий- элемент 14, второй бло к .параметрической обратной связи 15, первый и второй детекторы;16 и 17, суммирующий элемент 18, инерционный элемент 19, интегрирующий эле- мент 20, задатчик 21, графики взаимокорреляционных функций 22-25.
При Этом приняты следующие обозначения: установленное значение 26 коэффициента передачи Ko(t) объекта регулирования 3; установленное значение 27 времени запаздьшания T o(t) объекта регулирования 3, графики переходных процессов 28, 29 настройки коэффициента передачи К„ (А) и времени запаздывания СЛг.) модели объекта регулированияj х - выходной сигнал задатчика 21j у - выходной сигнал объекта регулирования 3;. g - . выходной сигнал инерционного блока 5j 2 - выходной сигнал первого блока запаздывания 6; q - выходной сигнал второго блока запаздывания 8j U - управляющее воздействие или .выходной сигнал исполнительного механизма 2J Д/1 г. выходные сигналы соответственно второго и первого блоков параметрической обратной связи, R - кор- реляционная функция; - временной сдвиг; Кд, - коэффициент усиления и время запаздывания объекта регулирования 3; К, (/м - коэффициент усй- и время запаздьшания модели
1922
, Д R - смешение времени сдвига, и взаимокорреляционной функции.
В .состав первого блока параметрической обратной связи входят первый и второй элементы умножения 10 и 11, .суммирующий элемент 12, инерционный элемент 13, интегрирующий элемент 14.
В состав второго блока параметрической обратной связи входят первый и второй; детекторы 16 и 17, суммирующий элемент 18, инерционный элемент 19 .и интегрирующий элемент 20с В качестве детекторов 16, 17 используются квадратичные детекторы.
Система работает сл.едующим образом
На выходе задатчика 21 формируется сигнал задания x(t) - в общем случае стационарный центрированный .слу-- чайньй процесс. На выходе сумматора 4 формируется сигнал ошибки С- (t) , преобразуя который регулирующий блок 1 совместно с исполнительным механизмом 2 формирует управляющее воздействие U(t). Управляющее воздействие U(t) поступает на вход объекта регулирования 3, описываемого передаточной функ-циёй
Wc(P)4Ko(4.nfe,PH),)
t. 1 О J J
СО
где Kg(t), o(t) - коэффициент передачи и время за-: паздывания объекта регулирования
- . . . -. 3, ;
а. - коэффициенты ха- . рактеристического уравнения объекта регулирования 3, р - оператор Лапласа, и на вход модели объекта с яереда.- точной функцией
WM(P) WM(p)-W3(p),
(2)
где W(p), ) - передаточные .функции инерционной и запаздьшающей частей модели объекта регулирования.
Модель объекта с изменяемым коэффициентом передачи K(Ai)fi и временем запаздыванияТ) (Дд,) образована последовательно соединенными блоком умножения 7, определяющим коэффициент пе- редачи К(/1,| модели, инерционным
блоком 5 n-го порядка с передаточной функцией
WM(P)
к,а,)| (a,,P-1)h
где К (Д/i) - коэффициент передачи модели объекта регулироMix
вания ,
- коэффициенты характеристического уравнения модели объекта регулирования,
Л - выходной сигнал второг;о блока параметрической обратной .связи 15, . первым блоком запаздывания 6 с педаточной функцией
) . ):
е ) - время запаздывания модели объекта регулирова- ния
X, выходной сигнал первого блока параметрической обратной связи 9; р - оператор Лапласа, е - юснование натурального
логарифма..
Если WO(P) WM(P), т.е. K(t) К„ТЯ, (5) ToCt) TM(Ai), и а. , то ошибка регулирования ,
d(p) и(р)Гуо(р) - w,(py w(.p) и(р)(к,(Я4й Ml i)J
определяется только свойствами .инерционного блока. 5 и не зависит от запаздывания в объекте регулирования 3 Благодаря исклк чению времени заrc(t)
паздывания io(.t) из замкнутого контура управления увеличивается устойчивость и качество переходных процессов в системе. Однако, если параметры Ko(t) иT o(t) нестационарны, то условие (5) в общем случае не вы- полняется и выражение (6) оказьшает- ся неверным. Блоки параметрической обратной связи 9 и 15 предназначены для настройки параметров соответственно Т5,(Яг) и К(Д/|) при изменении во времени napaiMeTpoB t o t) H.).
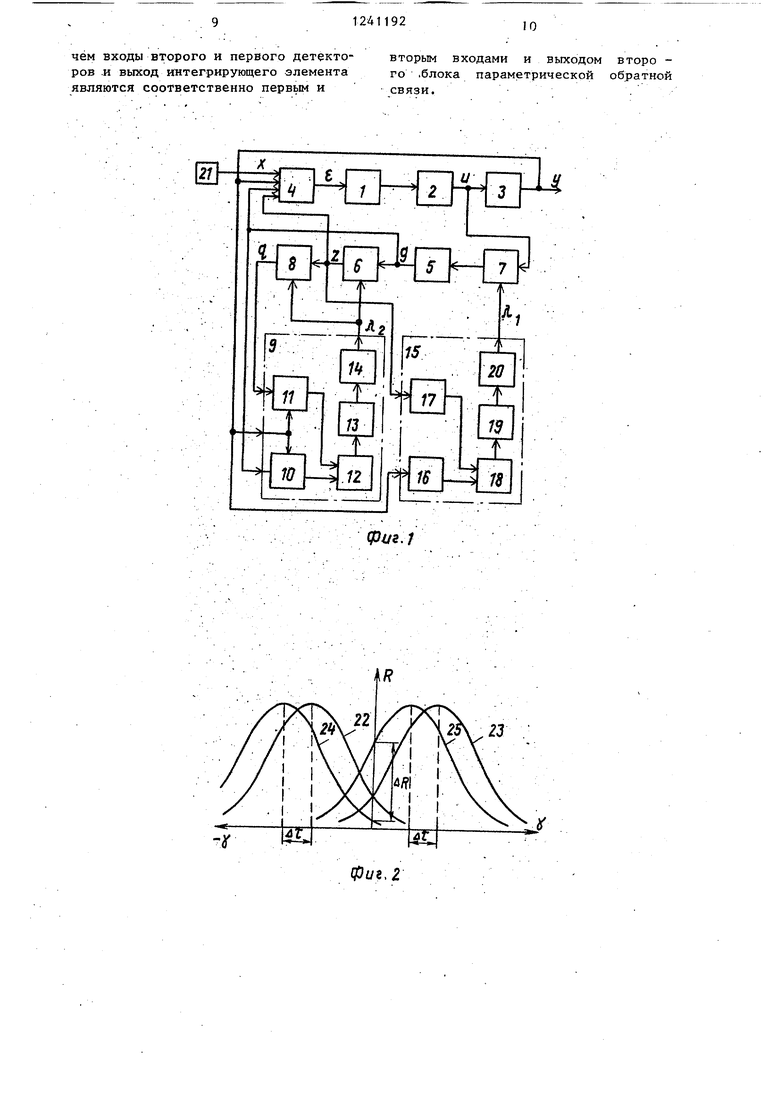
Принцип работы первого блока параметрической-обра- ной связи поясняется графиками, приведенными на фиг.2.
Так как x(t) - стационарный цент- рированный случайньй сигнал, то и y(t), g(t), q(t) выходные сигналы объекта регулирования 3, инерциочно
241192 ..4
го блока 5 и второго блока запаздывания 8 также стационарные центрированные случайные сигналы со взаимокорреляционными функциями
Rwo-(p (t) lt-)(7) Rtfq.(f) (t) q(t , (8)
10
15
20
25
30
34
40
550
55 L
где М -.символ операции математического ожидания; - временной сдвиг. Если передаточная функция инерционного блока 5 соответствует передаточной функции инерционной части объекта регулирования 3, то графики- функции Ку5(у0 и RyQ( имеют вид симметричных кривых, максимумы которых имеют координаты соответственно
azgmaKfRy8(,(t); ЛЬ (-.-)
«W .г (y-t,(t;);
И при Со(t) ) равноудалены от точки J О, Графики функций Ry3 (jO и Ryo(J T при To(t) (j(i) имеют вид кривых соответственно 22 и 23 на фиг. 2. При/ О, Rvo(/f) - RySCp 0. Если о() изменится (например, увеличится) на йТ, то максимумы функций Rvo(p, (| соответственно сместятся на д1Г и функции КуБ, RS будут иметь вид кривых соответственно 24 и 25 на фиг. 2, т.е. в точке 1 О значения функций отличаются друг от друга на величину
(t),( -P.yo(o)-Ry((D). Xg)
Следовательно, величина дК характери- :зует отклонение времени запаздывания М«((Яг.) модели объекта регулирования от времени запаздывания ) объекта регулирования 3 и может быть использована для настройки времени з.апазды- вания м (Кг) модели объекта регулирования при изменении времени запаздывания to(t) объекта регулирования 3, Первый блок параметрической обратной связи 9 работает следующим образом. Первый и второй элементы умножения 10 и 11 вычисляют соответственно произведения сигналов y(t)g(t) и y(t)q(t). Так как сигналы y(t), g(t), q(t) - стационарны, то
Д R (t)g(t) - Mfy(t)q(t) (t)g(t) - y(t)q(t)J. (10)
Разность y(t)g(t) - y(t)q(t) формируется на выходе суммирующего элемента
12, а оценка математического ожида- ния на интервале осреднения . вычисляется инерционным элементом 13 с передаточной функцией
) где Т, - постоянная времени инерционного элемента 13„ IQ Величина Т выбирается в диапазоне
Т,,, 5..-., где и)ji - частота
среза системы.
Вычисленная на выходе инерционно- 5 го элемент а 13 оценка сигнала ДК интегрируется интегрирую щим элементом 14. Сигнал Яг выхода интегри- руюр(его элемента 14 поступает на управляющие входы блоков запаздывания 20 6 и 8. Запаздывание ГТц (Я) изменяется, до тех пор, пока сигнал дК не станет равным нулю. При этом согласно (7), (8) и фиг. (Аг) C(t).
Для настройки коэффициента переда- 25 чи К|(Л) , при изменении коэффициен- та передачи Ko(t) объекта регулирования 3, предназначен второй блок параметрической обратной связ и (15), который работает следующим образом, зо
Сигнал y(t) с выхода объекта регу- , лирования 3 и сигнал-zCt) с выхода первого блока запаздывания 6 возводятся в. квадрат квадратичными детек- s торами 16, 17. Выходные сигналы, детекторов 16, 17 поступают на входы суммирующего элемента 18, которьш вычисляет их разность. Выходной сигнал суммирующего элемента 18 поступа- 40 ет на вход инерционного элемента 19 с.передатрчной функцией
)
1
1
где . - постоянная времени инерционного элемента 19i
На выходе инерционного, элемента .19 формируется сигнал дП разности 50 дисперсий сигналов y(t) и 2(t) в соответствии с выражениями
Dy ) , Бг ), (11) uD Da - Di MLy(t) - 55
- (t)l (t) - zMt)) .dzr
Оценка математического ожидания вычисляется инерционным элементом
19 на интервале осреднения , ко- торЬЕй выбирается
Тн9 ....,;.
где и)с, частота срез а системы.
Сигнал uD пропорционален разности коэффициентов передачи объекта регулирования 3 и его. модели K.(t ) - - К(Л), что следует из следующих вьфажений:
00- . . .
DV iw,(j.)|2 S4(J)du}, (13.)
- ь
JlWnCjJ) Зц(«))аи), .(14)
о . .
где Wp(ju)) , W..( ju)) - передаточные
функции объекта регудирования- 3 и его модели в частотной области;
5ц (w) - функция спектральной плотнос ; ти управляющего воздействия U.(t).
Так как статические коэффициенты передачи К, Км не зависят от частоты (А), а чистое запаздьшание в блоке запаздьшания 6 не влияет на величину дисперсии сигнала на его выходе, то выражения (13), (14) можно
переписать в виде
Dy
-т||1ш
llljaou.
TJILI
i--i
(MU +
1) |sM(J)d:u) (16).
т.е. при a ер будем иметь
AD Di. + 1
ку.р|(
uy - Dt l)PP м(и))а.
Сигнал ДВ интегрируется интегрирующим элементом 20 и, воздействуя на второй вход блока умножения 7, изменяет коэффициент передачи модели объекта регулирования до тех пор, .пока сигнал ЛП не станет равным О. При этом в соответствии с (12) и (17) К(Л (t).
Постоянные времени интегрир. интегрирующих элементов 14 и 20 определяют скорость настройки времени запаздывания LM и коэффициента передачи K.t модели объекта регулирования.,
Из соображений устойчивости, процесса настройки коэффициента передачи К| модели объекта, регулирования, постоянную времени интегрирующего элемента 20 следует выбирать из условия Тао (4-5)х , где cg оценка средне го значения времени запаздывания LO объекта регулирования 3. Оценку Т можно принятъ равной максимально возможному значениюТ щд д из всего диапазона изменения времени запаздывания ТГо (t) объекта регулирования 3,
Величина сигнала дВ (см. 17) ока- зьшает влияние на процесс настройки времени: запаздывания Я модели объекта регулирования. При дВ .0, оценка лК (см. 10) зависит не только от разности То (t) -Л|(Яи) но и от величины оценки сигнала ДВ. Один из возможных путей уменьшения этого влияния состоит в выборе постоянной времени , интегрирующего элемента 14 по величине, в 3-5 раз большей величины постоянной времени .Tjo ин- тегрируницего элемента 20. При этом процесс настройки коэффициента передачи К( модели объекта регулирования заканчивается раньше процесса настройки времени запаздьшания Vr модели объекта регулирования и не ока- зьшает на него влияния.
Графики переходных процессов в блоках параметрической обратной связи 9 и .15, полученные путем моделирования на ЭВМ М-6000, при указанных соотношениях постоянных времени интегрирующих элементов 14 и 20 и инерционных элементов 13, ;19 показаны на фиг. 3, где: 26 - устан овленное значение. Ko(t); 27 - установленное зна- .чение fi(t);28 - график переходного процесса настройки К, 29 - график переходного процесса на.стройки 1.
Данная была исследована путем моделирования на ЭВМ. Результаты моделирования (см. фиг. 3) показывают достаточно высокие б.ыстродейст- вие и точность процессов настройки ) и 1м(/12)л.:, вследствие этого высокое качество управления, обеспечиваемое системой при изменяющихся во времени Ko(t) и С о(с).
Формула изобретения
1. Самонастраивающаяся система,содержащая последовательно соединенные
0
5
0
5
0
5
0
5
5
инерционный блок, первый блок запаздывания, сумматор, регулирующий блок, исполнительный механизм и объект регулирования, подключенный выходом к второму входу сумматора, соединенного третьим входом с выходом задатчи- ка, а четвертым входом - с выходом инерционного блока, о т л,и ч а ю - щ а я с я тем, что, с целью повышения показателей качества регулирования системы, в ней дополнительно установлены блок умножения, первый и второй блоки параметрической обратной связи и второй блок запаздьшания, соединенный управляющим входом с выходом -первого блока параметрической обратной связи и с управляющим входом первого блока запаздьшания, информационным входом - с выходом первого . блока запаздьшания и с первым входом второго блока параметрической обратной связи, -а выходом - с первым входом перового блока параметрической обратной связи, подключенного вторым входом к выходу инерционного блока, а третьим входом - к выходу . регулирования и к второму чходу второго блока параметрической обратной связи, соединенного выходом с первым входом блока умножения, подключенного вторым входом к выходу исполнительного механизма, а выходом - к входу инерционного блока.
2 о Система поп„ 1, отличающая с я тем, что первый блок параметрической обратной связи содержит первый и второй элементы умножения, соединенные первыми входами между собой, а выходами - с первым и вторым входами суммирующего элемента, под- ключе1 ного выходом через инерционный элемент к входу интегрирующего элемента, причем вторые входы первого и второго элемента умножения, первый вход первого элемента умножения и выход интегрирующего элемента являются соответственно первым, вторым, третьим входами и выходом первого блока параметрической обратной связи.
3. Система по п. 1, о т л и ч а ю- щ а я с:я тем, что второй блок параметрической обратной связи содержит первьш и второй детекторы, соединенные с первым и вторым входами суммирующего элемента, подключенного выходом через инерционный элемент к входу интегрирующего элемента, причем входы второго и первого детекторов .и выход интегрирующего элемента являются соответственно первьт и
вторым входами и выходом второ - го .блока параметрической обратной связи.
Фш.1

| название | год | авторы | номер документа |
|---|---|---|---|
| Самонастраивающаяся система автоматического управления для объектов с запаздыванием | 1981 |
|
SU1173390A1 |
| Способ и система адаптивного управления загрузкой дробилки | 1985 |
|
SU1251952A1 |
| Адаптивная система управления для объектов с изменяющимся запаздыванием | 1986 |
|
SU1383292A1 |
| Система управления объектом с запаздыванием | 1984 |
|
SU1200241A1 |
| Устройство для компенсации запаздываний | 1986 |
|
SU1409966A1 |
| Адаптивная система управления | 1985 |
|
SU1257612A1 |
| Система автоматического управления | 1986 |
|
SU1409971A1 |
| Устройство автоматического регулирования толщины полосы на непрерывном прокатном стане | 1987 |
|
SU1435347A1 |
| Адаптивная система управления для объектов с запаздыванием | 1985 |
|
SU1310774A1 |
| СИСТЕМА РЕГУЛИРОВАНИЯ ОБЪЕКТА С РЕЦИКЛОМ | 2014 |
|
RU2542910C1 |
Изобретение относится к энергетической, химической и пищевой промышленности и может -найти применение, при управлении объектами, например молотковьми дробилками. Осуществляется компенсация влияния изменения величин коэффициента передачи и времени запаздывания за счет изменения коэффициента передачи и времени запаздывания модели объекта регулирования, включенной в обратную связь основного контура регулирования системы.. Она состоит из блока, умножения, инерционного блока и первого блока запаздывания, В системе выходной сигнал .задатчика через сумматор, регулирующий блок и исполнительный механизм воздействует на объект регулирования . .и поступает на один из входов блока умножения. Выходной сигнал объекта поступает на второй вход сумматора. Выходной сигнал блока умножения через инерционное звено поступает на третий вход сумматора и информационный вход первого блока запаздыванияi Выходной сигнал последнего пос тупает на четвертый вход сумматора и на информационный вход второго блока запаздывания. Коэффициент передачи модели изменяется путем подачи на второй вход блока умножения выходного сигнала второго блока параметрической обратной связи, на ,входы которого поступают выходные сигналы первого блока запаздывания и объекта регулирования. Время запаздьшания. МО-- дели изменяется за счет подачи на управляющие входы первого и второго блоков запаздьюания выходного,сигнала первого блока параметрической ратной связи, на входы которого подаются выходные сигналы второго блока запаздывания, объекта регулирования и инерционного звена. 1 з.п. ф-лы, З.ил. с (О (Л С гз 4 СО lie
-Г
23
фиг, 2
« (7, TO, 26 A ATjJVf
Редактор М.Бандура
Составитель Ю.Гладков
Техред Л. Олейник Корректор Л.Пилипенко
Заказ 3487/42Тираж 836 . Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул„ Проектная, 4
ф1/г. 3
| , Авторское свидетельство СССР №301689, кл | |||
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Регулятор для объектов с переменным запаздыванием | 1976 |
|
SU579597A1 |
| Система управления для объектовС зАпАздыВАНиЕМ | 1979 |
|
SU830295A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| . | |||
