Известны устройства для захвата цилиндрических грузов, например бочек, содержащие раму, дугообразные направляющие с подвижными дуговыми захватами и привод выдвижения захватов. Однако с помощью таких устройств можно захватывать одновременно только один груз.
Целью изобретения является обеспечение одновременного захвата нескольких грузов. Это достигается тем, что привод выдвинсения захватов выполнен в виде двух подвижных навстречу друг другу планок, щарнирно связанных посредством кронштейнов с захватами и приводимых в действие тросо-блочной системой, связанной с двумя вертикальными тягами, попеременно взаимодействующими с подвижной щтангой, снабженной прицепной петлей, навещанной на крюк грузоподъемной машины.
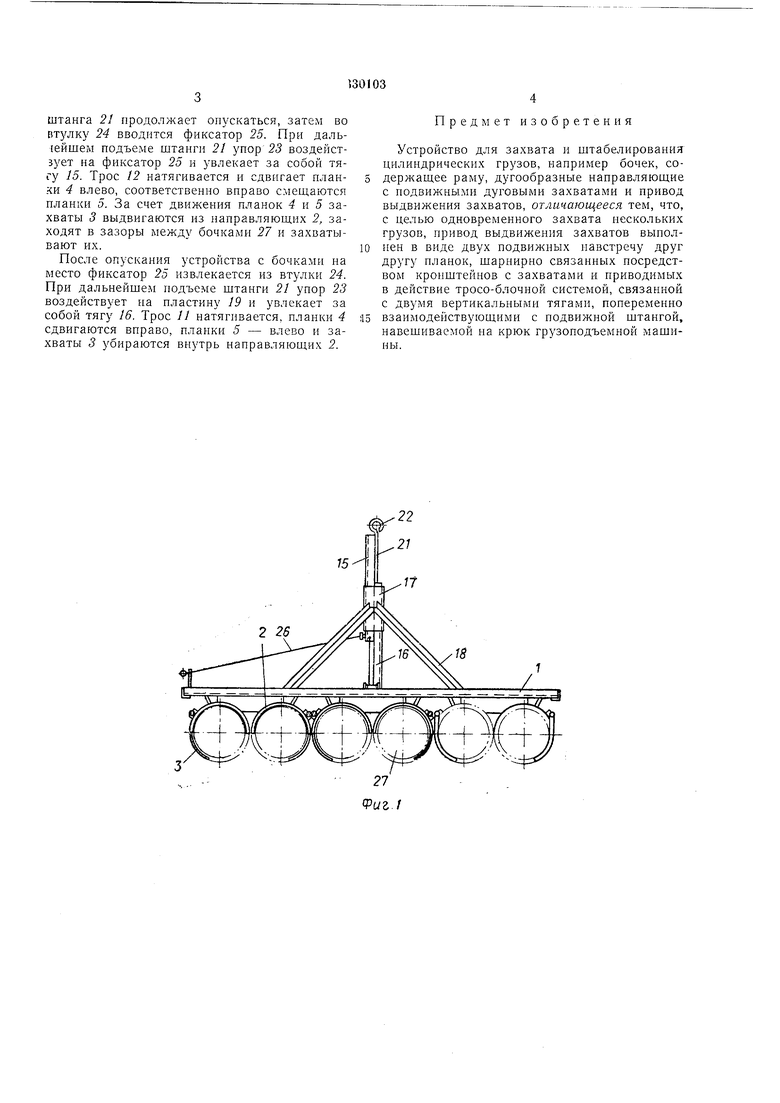
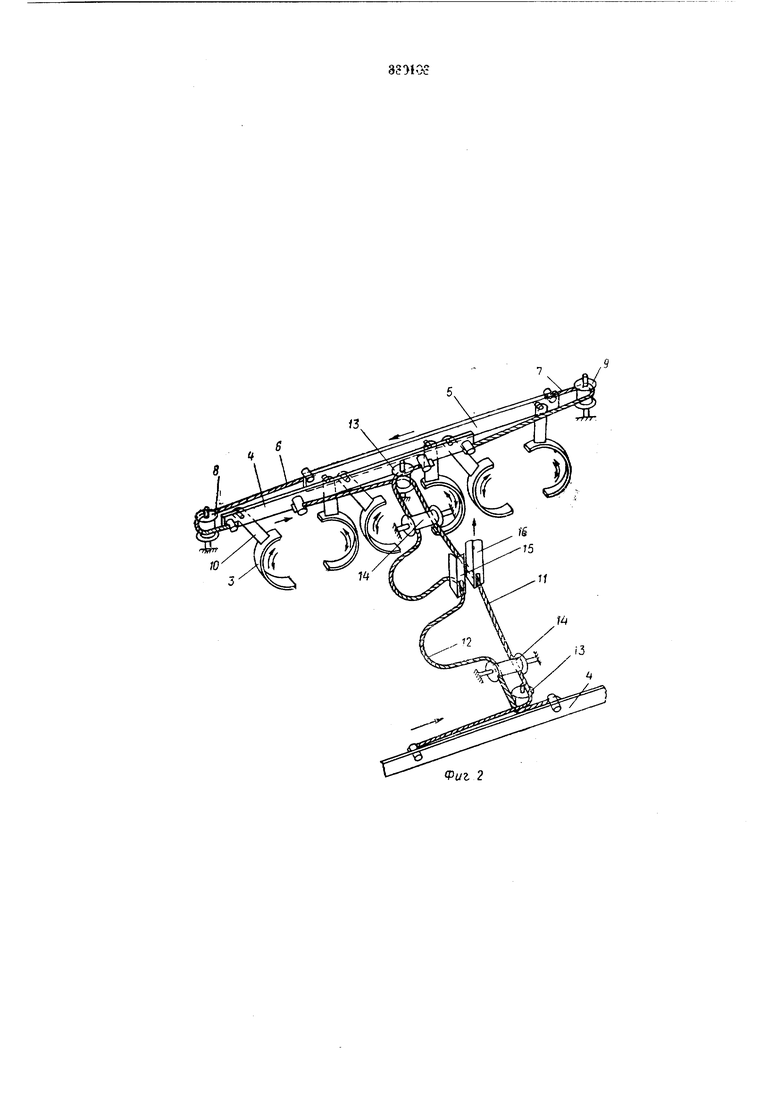
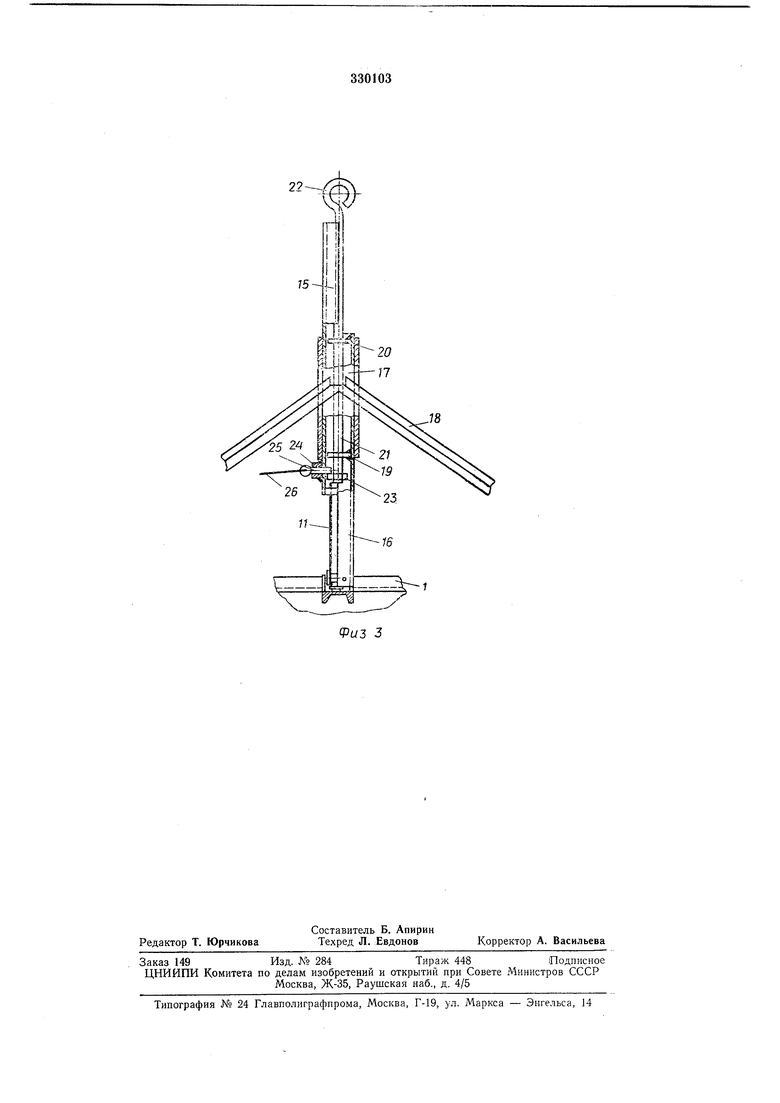
На фиг. 1 схематически показано описываемое устройство, вид сбоку; на фиг. 2 - схема работы механизма выдвижения захватов; на фиг. 3 - вертикальная стойка рамы с частичным разрезом.
Устройство содержит раму 1, на которой жестко укреплены дугообразные направляющие 2 с подвижными дуговыми захватами 3, установленными в направляющих 2 поочередно с левой и правой сторон.
жены по две планки 4 и 5, связанные между собой тросами 6 и 7, огибающими блоки 8 и 9, оси которых закреплены на раме 1. Захваты 3 снабжены кронштейнами 10, связанными шарнирно с планками 4 и 5. При этом левосторонние захваты связаны с планками 4, а правосторонние - с иланкам 5. К планкам 4 также прикреплены два троса // и 12, которые огибают блоки 13 и 14, установленные на раме /, и связаны с двумя вертикальными тягами 15 и 16, подвижно установленными в стойке 17, жестко связанной с рамой / подкосами 18. К тяге 16 приварены две пластины 19 и 20 с отверстиями, сквозь которые пропущена щтанга 21, снабженная на верхнем конце прицепной петлей 22, а на конце упором 23. К тяге 15 приварена втулка 24, в которой установлен фиксатор 25 с тросиком 26 управления.
В исходном иолол ении устройство за петлю 22 подвешено к крюку грузоподъемного механизма (на чертеже не показан), фиксатор 25 извлечен из втулки 24, тяга 15 находится в крайнем нижнем положении, тяга 16 - в верхнем, планки 4 - в крайнем правом положении, планки 5 - в левом, а захваты 5 убраны внутрь направляющих 2.
штанга 21 продолжает опускаться, затем во втулку 24 вводится фиксатор 25. При дальнейшем подъеме штапги 21 упор 25 воздействует на фиксатор 25 и увлекает за собой тягу 15. Трос 12 натягивается и сдвигает планки 4 влево, соответственно вправо смепдаются планки 5. За счет движения планок 4 и 5 захваты 3 выдвигаются из направляющих 2, заходят в зазоры между бочками 27 и захватывают их.
После опускания устройства с бочками на место фиксатор 25 извлекается из втулки 24. При дальнейшем нодъеме штанги 21 упор 23 воздействует на пластину 19 и увлекает за собой тягу 16. Трос // натягивается, планки 4 сдвигаются вправо, планки 5 - влево и захваты 3 убираются внутрь направляюш,их 2.
Предмет изобретения
Устройство для захвата и штабелирования цилиндрических грузов, например бочек, содержашее раму, дугообразные направляющие с подвижными дуговыми захватами и привод выдвижения захватов, отличающееся тем, что, с целью одновременного захвата нескольких грузов, привод выдвижения захватов выполнен в виде двух подвижных навстречу друг другу планок, шарнирно связанных посредством кронштейнов с захватами и приводимых в действие тросо-блочной системой, связанной с двумя вертикальными тягами, попеременно
взаимодействующими с подвижной штангой, навешиваемой на крюк грузоподъемной машины.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЗАХВАТ ДЛЯ ШТУЧНЫХ ГРУЗОВ | 1967 |
|
SU197134A1 |
| Захватное устройство для грузовС цЕНТРАльНыМ ОТВЕРСТиЕМ | 1978 |
|
SU810598A1 |
| Грузозахватное устройство | 1980 |
|
SU996319A1 |
| Автоматический захват для штучных грузов | 1981 |
|
SU1013386A1 |
| Устройство для фиксации арматурных каркасов в форме | 1977 |
|
SU737590A1 |
| КАНТОВАТЕЛЬ ДЛЯ БОЧЕК С КОНЦЕВЫМИ ОБРУЧАМИ | 2004 |
|
RU2258659C1 |
| КРЕСЛО-КОЛЯСКА ДЛЯ ИНВАЛИДОВ И ПАНДУС ДЛЯ ПЕРЕМЕЩЕНИЯ КОЛЯСКИ ДЛЯ ИНВАЛИДОВ ПО ЛЕСТНИЧНЫМ МАРШАМ (ВАРИАНТЫ) | 2011 |
|
RU2478362C2 |
| ВИЛОЧНЫЙ ЗАХВАТ ДЛЯ ПАКЕТИРОВАННЫХ ГРУЗОВ | 1969 |
|
SU233858A1 |
| МАНИПУЛЯТОР | 2006 |
|
RU2305639C1 |
| МАНИПУЛЯТОР | 2006 |
|
RU2305638C1 |
Фиг 2
15
ФиЗ 3
