Изобретение относится к захватам для штучных грузов, подвешиваемым нетлей к крюку или к траверсе грузоподъемного устройства, содержащим ланы с поворотными относительно горизонтальных осей и управляемыми с помошью тяг упорами для удержания поднятого груза, и предназначено для использования применительно к установленным на уторы деревянным бочкам, которые по ряду технических требований (особенно если они с жидким грузом) должны транспортироваться в вертикальном положении. В частности, это вызывается тем, что при транспортировании бочек в горизонтальном положении деформируются их боковые стенки.
Конструктивная особенность предложенного захвата для штучных грузов состоит в том, что управляющие упорами тяги подвижно закреплены с помощью пальцев в вертикальных прорезях лап, имеюш,их в верхней части очертание, соответствующее кривизне стенки бочки; тяги связаны с петлей так, что в нерабочем положении упоры устанавливаются вертикально, и в таком положении захват опускают на бочку до соприкосновения внутренних поверхностей лап с бочкой, при этом пальцы тяг опускаются в прорезях в нижнее положение, устанавливая упоры в горизонтальное положение, которое фиксируетсй зацепляемым за петлю поворотным гаком.
Для автоматической отцепки захвата от бочки после ее перегрузки поворотный гак выполнен с эксцентрично расположенной массой, под действием которой оп отцепляется от петли после опускания бочки на опорпую поверхность.
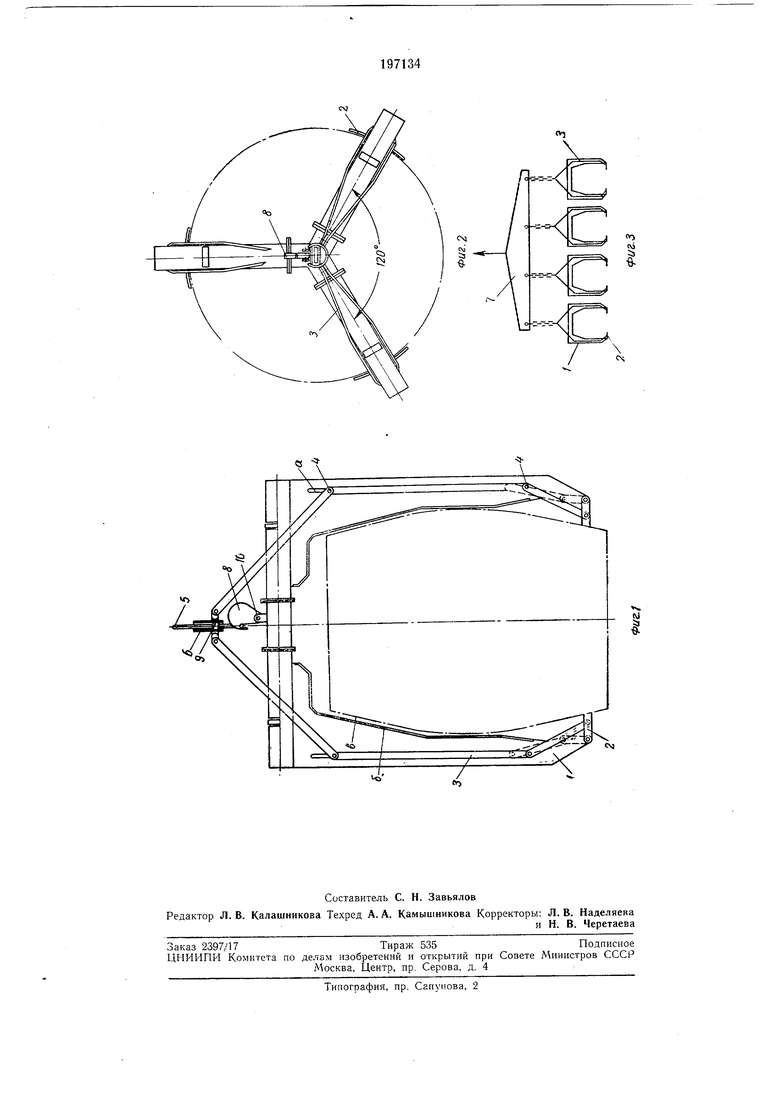
На фиг. 1 показан описываемый захват, вид сбоку;, на фиг. 2 - то же, вид сверху; на фиг. 3 - захват, подвешенный к траверсе.
Захват вынолнен с тремя лапами 1, расположенными одна по отношению к другой под углом примерно 120°. К нижней части каждой лапы поворотно прикреплены упоры 2, служащие для удержания поднятой бочки. Упорами управляют с помощью шарнирно сочлепеиных тяг 3. Тяги имеют пальцы 4, вставленные в пазы а лап с возможностью перемещения в них. Верхние звенья тяг связаны с петлей 5 через вертикальную направляющую 6. Петля служит для подвешивания захвата к крюку грузоподъемного устройства или к траверсе 7 (см. фиг. 3). Связующим звеном между петлей и лапами служит прицепное устройство в виде гака 8. Если гак отценлен от петли, то захват подвешивается па тягах 3 с помощью имеющейся в направляющей 6 поперечины 9. В этом случае пальцы тяг занимают в пазах а верхнее положение.
Работа захвата заключается в следующем.
При расцеплении гака и петли захват, подвешенный на тягах 3, наводят на бочку и опускают до соприкосновения поверхностей б лай с поверхностью в бочки. При этом тяги перемещаются относительно лап так, что пальцы 4 занимают в пазах а нижнее положение, а петля приближается к гаку. Упоры 2, находящиеся до оиускаиия захвата в вертикальиом положении (как иоказано на фиг. I. пунктиром), под действием перемещающихся тяг занимают горизонтальное положение. На опущенную петлю накидывают гак, и захват готов для подъема бочки. При первом подъемном движении упоры отрываются от опорной поверхности и входят во взаимодействие с бочкой.
После перемещения бочки и опускания ее на опорную поверхность захват передвигается относительно нее вниз, и между уиорами 2 и бочкой образуется зазор. Когда петля опустится в крайнее нижнее положение, гак освобождают от петли. Если же гак выполнен с эксцентрично расноложенной массой, то он отцепляется сам, поворачиваясь под действием этой массы относительно оси W. При пос чедующе.м подъеме петли тяги разворачивают упоры в исходиое (вертикальное) положение, и захват может быть снят с бочки.
Если иредиазначенные для перегрузки бочки устаиовить илотио в ряд, то в зависимости от грузоподъемности имеющегося в иаличии устройства, можно применить для перегрузки
траверсу с несколькими захватами такой конструкции, например с четырьмя (см. фиг. 3).
Предмет изобретения
1. Захват для штучных грузов, подвещиваемый петлей к крюку или к траверсе грузоподъемного устройства и содержащий лапы с поворотными относительно горизонтальных осей и управляемыми с помощью тяг упорами для удержания поднятого груза, отличающийся тем, что, с целью использования захвата применительио для установленных на уторы деревянных бочек, управляющие упорами тяги подвижно закреплены посредством
пальцев в вертикальных прорезях лап, имеющих в верхпей части очертаиие, соответствующее кривизне стеики бочки, и связаны с петлей так, что в нерабочем положении упоры устанавливаются вертикально и в таком положении захват опускается на бочку до соприкосиовения виутренних поверхностей лап с поверхностью бочки, при этом пальцы тяг опускаются в прорезях лап в нижнее положение, устанавливая упоры в горизонтальное
рабочее положение, которое фиксируется зацепляблМым за петлю поворотным гаком.
2. Захват по и. 1, отличающийся тем, что, с целью автоматической отцепки его от бочки после перегрузки, поворотный гак выполней с эксцентрично расположенной массой, под действием которой он расцепляется с петлей после опускания . бочки на опорную поверхность.
(V,
- К «
fo :s
flex
| название | год | авторы | номер документа |
|---|---|---|---|
| Захват-раскладчик | 1980 |
|
SU948835A1 |
| Грузозахватное устройство | 1990 |
|
SU1736904A1 |
| Захват для бочек к погрузчику | 1986 |
|
SU1368259A1 |
| Автоматический захват для штучных грузов | 1981 |
|
SU1013386A1 |
| Захватное устройство для штучных грузов | 1981 |
|
SU1065325A1 |
| Автоматический захват для штучных грузов | 1976 |
|
SU557035A2 |
| ЗАХВАТНОЕ УСТРОЙСТВО ДЛЯ ТРАНСПОРТИРОВАНИЯ МЕТАЛЛИЧЕСКИХ ТРУБ БОЛЬШОГО ДИАМЕТРА | 2003 |
|
RU2245292C2 |
| Грузозахватное устройство | 1980 |
|
SU912623A1 |
| АВТОЗАХВАТ ДЛЯ ТРАНСПОРТИРОВКИ МЕЛКОШТУЧНЫХ БЕТОННЫХ ИЗДЕЛИЙ | 2007 |
|
RU2337052C1 |
| Захват-кантователь | 1989 |
|
SU1794852A1 |
CVJ
