(54) ЭЛЕКТРОГИДРАВЛИЧЕСКАЯ СЛЕДЯЩАЯ СИСТЕМА .
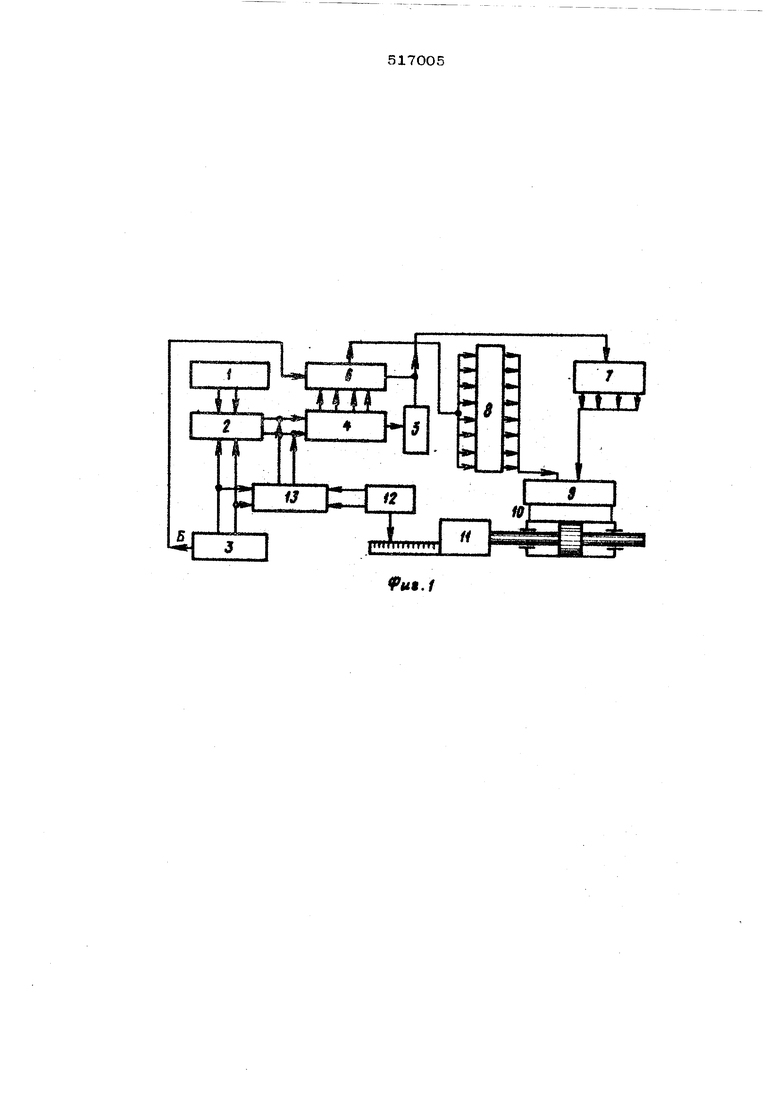
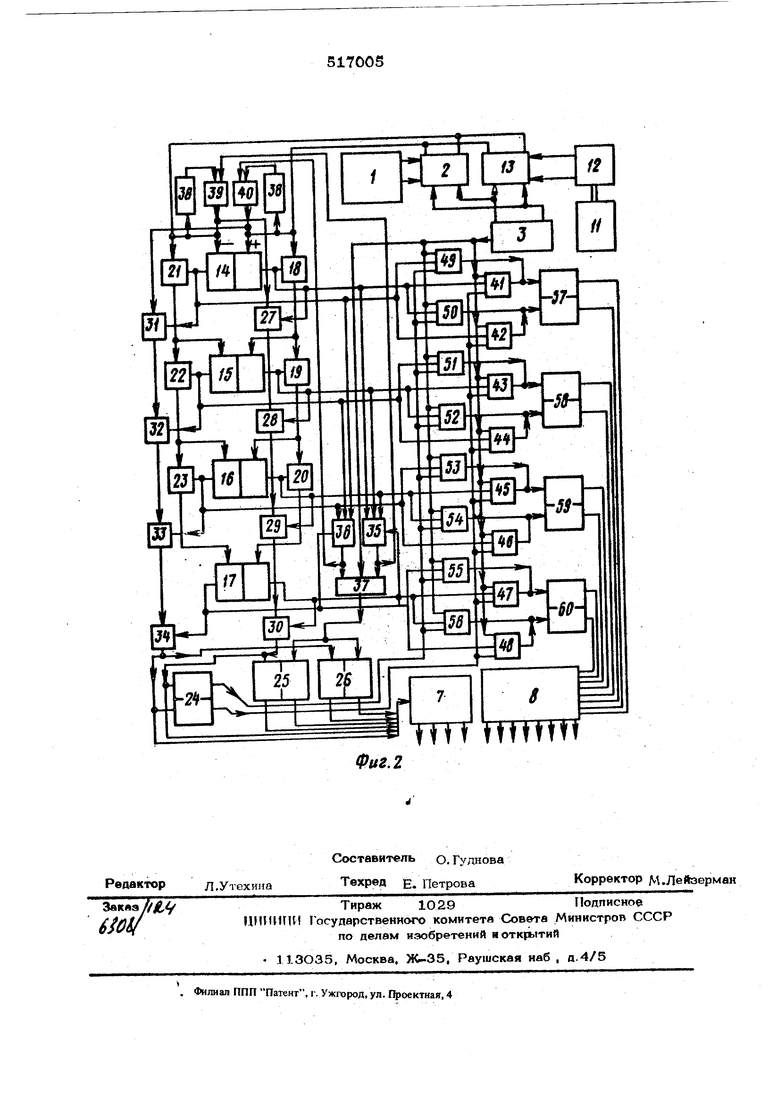
{ЦИФРОВАЯ установки в,исходное ссютояние, соединенному выходом с блоком передачи цифровой: информации н блоком управлетш переключением знака движения. На фиг, 1 грнведена.блок-схема эЪектрогидравлической цифровой следящей систему Система содержит блок программы 1| блок i. и;1Хронизации импульсов программы 2, генератор тактовых импульсов 3цр«версивну счетчик 4, блок установки в исходное состо яие 5, блок параппельной передачи цифровой информации 6, блок управления переключением знака движения 7, блок управления эпектрсмагнитами объемных дозаторов 8, апектрогпдравлический шгфровой регулятор расхода 9, исполнительный Г .идродагаатель 10, управляемый обьект lLi, блек обратной связи 12 и блок синхронизации импульсов обратной связи 13, Блоки 6-9 и гидродви гатель 10 в совокупности составляют элект рогидравлическую цифровую испошительную часть системы, На фиг, 2 приведена развернутая структу ная схема двоичного реверсивного счетчика 4 с блоком исходного состояния и элеь1ента зди параллельной передачи цифровой информа «ши на блоки управления электромагнитами, реверсивньй счетчик состоит «33 триггеров 14-17 и вентилей 18-23, Блок ; сходногр состояния 5 содержит уриггерк 24-26, вентилк 27-34, потенциал ные схл гы совпадения 35,36, логическую схему lUW - И Й:7, два элемента задержки .43 н вентил нГ39, 40. Элсментач1и параллельной передачи ййфровой информации являются импульсно-потен циальиые схемы совпадения 41-48, 49-56 и тригг-еры 57-60, Система работает следующим образом. От блока программы 1 последовательность импульсов через блок синхронизации 2 поступает на один из входов счетчика 4 в зависимости от направления движения регулируемого объекта 11, Состояние счетч№ка 4 определяет величину рассогласования системы, так как на второй вход счетчика поступают импульсы от блока обратной связи 12 через блок синхронизации 13 соответственио величине перемещения регулируе мого объекта 11. Информация о состоянии счетчикп 4 в параллельном двоичном коде через блок 6 подастся на вход блока управления 8, который эбеспечивает необходимые переключения регулятора расхода 9, чем и опредгзляегся реолироватте CKOJDDCTH исполлтпольното тидрпдвигателя 1О, Блок 5 с помощью блозсп управления 7 обеспе- чиппот ие:.чЗход11 :ыо порсключегиш в рог ляг-Г)е рмсхода 9 лпя зпданпп трсбуе.ого .аправления движения гидродвигателя 10, а также вьждючение элементов регулятора 9 после отработки-заданного перемещения. Генератор 3 управляет работой блока параллельной передачи цифровой информации б, а также вбтдаётимпульсы син фониза1ши на блоки 2, 13, благодаря чему исключается потеря инфЕрмадйи на входе счетчика 4 в случае совпадения во времени импульсов об ратной связи с импульсами программы. Допустим, в исходньй момент временитриггеры реверсивного счетчика находятся в исходномсо тоянии -(произведен сброс). При этим вентили; 2Г, 22, и 27-29 закрыты а противоположные им 1вентипи 21( 22, 23 40 и 32 - 34 открытьь Потенциальная схема совпадения ,35 на четыре входа через схему/И -ИЛИ 37 разрешает прахождениетактовых импульсов с генератора 3 на соответствующие входы триггеров 25, 26, подтверждая их состояние, которому .соответствуэт включение электромагнитов цифрового регулятора, управляющего гидродвигателем, Кроме этого, тактовые импульсы ттроходят через импульоно-потенциальные схемы совпадения 42,44, 46 и 48 на соответствующие входы триггэ- ров 57, 58, 59 и 60, подтверждая их иОг« ходное состоя1ше, которому соответотвует включение электромагнитов, закрытие золотниковых вентилей дозирующих ячеек шфрового регулятора. Предположим, что на вход + счетчика 4 поступают импульсы программы. Прежде , чем произойдет изменение состояния счетчика 4, через открытьв вентили 31-34 первый импульс пройдет на один из входов блока управления 7, по команде которого с помощью тиристорной схемы формирования обес печится форсированное включение одного из электромагнитов золотников регулятора 9, Одновременно с этим подтверждается состояние триггера 24, т, е,-разрещающие сигналы поступают на один из входов импульснопdтeнциaльныx схем совпадения 41-48, После прихода первого импульса программы изменяется состояние триггера 14 счетчика 4, В результате схема совпадения 42 У. запрет по входу от данного триг гера, а схема совпадения 41 - разрешак щий сигнал на прохождетю тактовых иктпульсов, что приводит и изменешпо состояния триггера 57, Сигнал с соответствующего выхода триггера 57 в момент его пероклктчения с помощью тиристорной схемы форси- рова}шя блока 8 обеспелтвает форсиров1;Нное включение электромагнита дозатора регулярного . расхода, Анплогпшо происх длг управление остальными дозаторами ре, 1гулятора строгом соответствии с состоянием счетчика 4, которое опредеаяет величину рассогпасовання в системе, ) Реверсированию системы предшествует установка ее в исходное состояние, С приходом на одни из входов счетчика 4 перво :го импульса прттграммц соответствующего началу движения в OTpHjjQTjenbHOM направлен НИН, происходит опрокидьГванив счетчика 4, т.. е. изменение состояния всех его тригге- рЬв14 Г7. При этом вентили 21-23, 4О и 31-34 заперты, а вентили 18-2о7 39 и 27-ЗО открыты. Вместо схемы совпадения 36 разрешающий сигнал появляется на вььходе схемы совпадения 35, При этом состо кие остальньк элементов системы не измен5 ется. Для того чтобы исключить пфтерю пер вого импульса программы при изменении направления движения, т, е, устранить зону нечувствительности по входу счетчика 4, первый импульс программы одновременно подается на элемент задержки 38 и через открытый в данньй момецт вентиль 39 вторично подается на вход - счетчика 4, При любом состоянии счетчики, отличном от со стояния ОООО и 1111, вентили 39-.-и 40 закрыты. Задержанный во времени импульс отрицательного направления, через вентили 27-30 поступает на блок управления 7, обеспечивая тем самым команду на форвиро ванное включевде регулятора 9, Одновремен но с этим изменяется состояние триггеров 24 и .25,С триггера 24 разрешающие сипналы подаются на схемы совпадения 49-56, а запрещающие - на схемы совпадения 4148, При вводе задержанного импульса на счетчик 4 вновь изменяется состояние триггера 14, после чего разрешающий сигнал подается на схему совпадения 49, , В дальнейшем цикл продолжается аналогнчно как при подаче импульсов на вход i счетчика 4. Для поддержания электромагнитов во включенном состояжт после импудьса форсированного) включения с помощью тиристорных схем блоков 7,8 на их обмотки подаются сигналы с триггеров 57-60 усиленные с помощью транзисторных усилителей мощности блоков 7 и 8, Предложенная система не требует мопол нительного преобразования цифровой информации, поступающей с реверсивного с четчи- ка,и блок 6 выполняет лишь функции пара; лельного переноса ее на блок управления 8, имея при этом сравнительно простую логическую схему, чтоТвозмойсно благодаря раэ делению функШй квантования импульсов раохода в электрогидравлическом цифровом регуляторе. Это также обуславливает умень- щение акустического шума при работе системы и повыщает ее надежность, особенно при использовании распределителя непрерывного йействия- кранового типа. Формула изобретения Электрогидравдаческая цифровая следящая система, содержащая реверсивный счетчик, связанный через блоки синхронизации, гуправляюише входы которых подключены к генера тору тактовых им117льсов,с 5поком1 программы в блоком обратной связи, злектрогндравличвскиб цифровой регулятор расхода, связанный с блоком управления переключением знака движения и с исполнительным гидродвигателем, в блок установки в исходное состояние, о т д и ч а ю 1ц а зв с я тем, что, с целью повышения надежности работы системы, в ней установлены блок передачи цифровой инфо1 мации и блок управления электромагнитами объемных дозаторов электрогидравлического цифрового регулятора расхода, входы которого через блок передачи цифровой иифор-мации связаны с параллельными выходами реверсивного счетчика, один пз выходов ко торого подключен к блоку установки в неходкое состояние, соединенному выходом с блоком передачи цифровой информации и управления переключенпем знака движения.
IM
Lj
tTT
tf
13
IZJ
Ш
JL™F
ut.f mT
Фиг. 2 TTTttttf
| название | год | авторы | номер документа |
|---|---|---|---|
| ЗЛЕКТРОГИДРАВЛИЧЕСКАЯ РЕЛЕЙНО-ИМПУЛЬСНА.Я СЛЕДЯЩАЯ СИСТЕМА | 1971 |
|
SU292140A1 |
| В ПТБJ.j.t^ ./,',IV vr, J-Jwulb^^^i' I 'jt^ | 1973 |
|
SU370375A1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКАЯ ЦИФРОВАЯ СЛЕДЯЩАЯСИСТЕМА | 1972 |
|
SU330262A1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКАЯ СЛЕДЯЩАЯ СИСТЕМА | 1973 |
|
SU368418A1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКАЯ РЕЛЕЙНАЯ СЛЕДЯЩАЯ | 1973 |
|
SU370376A1 |
| Электрогидравлический следящий привод | 1985 |
|
SU1269092A1 |
| Цифровая система программного управления | 1979 |
|
SU883868A1 |
| Система программного управления процессом порционной вакуумной обработки стали | 1989 |
|
SU1684347A2 |
| Цифровой электрогидравлический привод | 1979 |
|
SU823665A1 |
| Способ управления электроприводом лифта с двухскоростным асинхронным электродвигателем и устройство для его осуществления | 1985 |
|
SU1307528A1 |