Изобретение относится к области ирограммисго управления перемещением транспортирующей установки и предназначено для исиользования в технологически.х линиях, в которых транспортировка обрабатываемых изделий по позициям производится механическим оператором-ротором с электроприводом. В частности это устройство может применяться для програММного управления оператором автоматической гальванической линии.
В схемах автоматического управления подобными операторами, как правило, имеются: блок обратной связи, определяющий положение оператора, и блок совпадения, который служит для выдачи команды на останов оператора в случае равенства номеров позиции, заданных программой и зафиксированных блоком обратной связи. В этих схемах для задания вре.чепи вынужденного простоя оператора (пауз) имеются специальные счетчики времени.
В нсдобиых схемах количество комаид, определяющее число дорожек с информацией на программоносителе, достигает такой величины, что становится невозможным применение в качестве программоносителя стандартной перфоленты, и поязляется необходимость разработки специальных считывающих устройств для ввода информации.
Целью изобретения является повыщение надежности работы устройства.
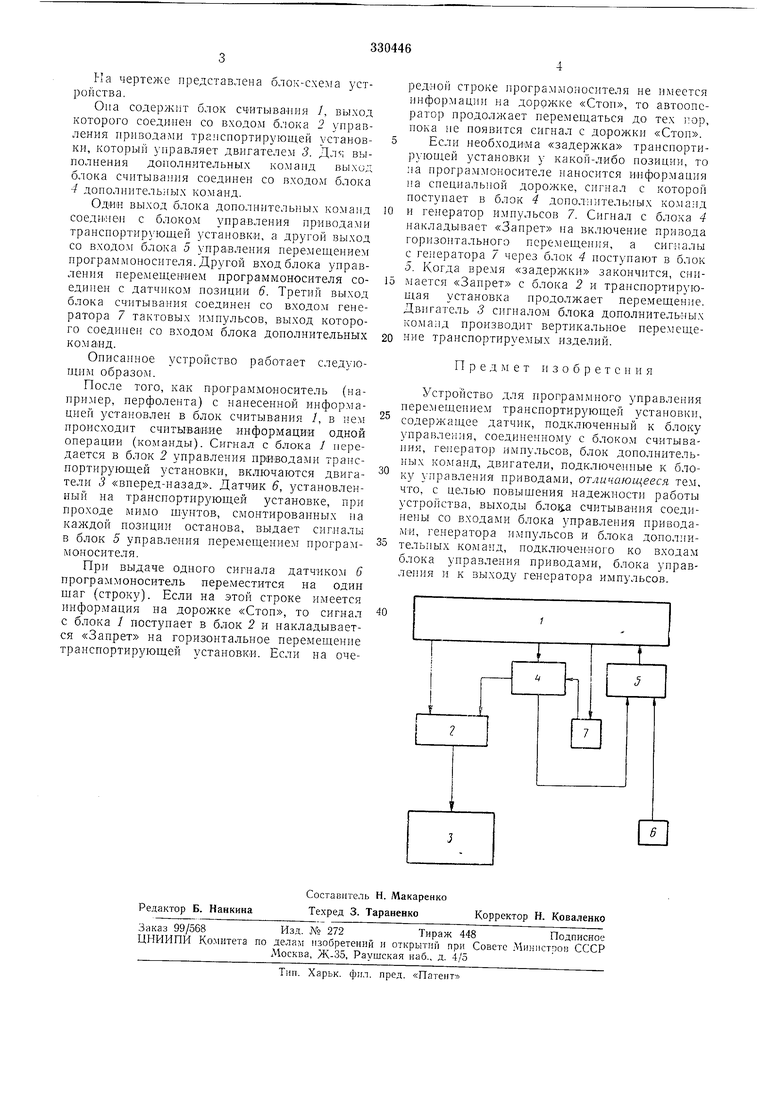
Это достигается тем, что блок считывания соединен с блоком управления приводами, с генератором импульсов и блоком допол-нительных команд, подключенным к блоку управления приводами, блоку управления и генератору импульсов.
Такое соединение блоков позволяет про0граммно-задающему блоку, работающему на стандартном программоносителе и управляющему перемещением транспортирующей установки, выполнять роль блока обратной связи, блока совпадений и счетчиков времени.
5
Для этого при перемещении трансиортирующей установки с одной позицией на другую нрограммоноситель делает столько холостых ходов, сколько позиций технологической линии должиа миновать установка, которой задается только направление движения. Для счета времени в паузах программоноситель совершает такое количество холостых ходов с определенным тактом, которое запол5няет вынужденную паузу между выполнением установкой двух соседних команд. Начало и конец «холостых щаговых перемещений программоносителя задается самим программоносителем, на котором наносятся для этого соответствующие команды.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ РОТОРНЫМ ЭКСКАВАТОРОМ С НЕВЫДВИЖНОЙ СТРЕЛОЙ | 1966 |
|
SU214641A1 |
| СИСТЕМА ЧИСЛОВОГО ПРОГРАММНОГО УПРАВЛЕНИЯ МЕТАЛЛОРЕЖУЩИМИ СТАНКАМИ | 1971 |
|
SU319382A1 |
| Автоматическая линия для нанесения гальванических покрытий | 1980 |
|
SU933822A1 |
| Устройство программного управления автооператорами многопроцессных автоматических линий гальванопокрытий | 1982 |
|
SU1081243A1 |
| Стенд для испытания двигателяВНуТРЕННЕгО СгОРАНия | 1979 |
|
SU811093A1 |
| Устройство для управления автоматическими линиями обработки деталей | 1983 |
|
SU1135820A1 |
| УСТРОЙСТВО для ПРОГРАММНОГО УПРАВЛЕНИЯ ТРАНСПОРТНЫМ МЕХАНИЗМОМ ГАЛЬВАНИЧЕСКОЙ | 1973 |
|
SU394755A1 |
| УСТРОЙСТВО для УПРАВЛЕНИЯ РОТОРНЫМ ЭКСКАВАТОРОМ | 1973 |
|
SU386075A1 |
| Устройство для автоматического адресования транспортных средств | 1982 |
|
SU1027737A1 |
| Система программного управления процессом порционной вакуумной обработки стали | 1989 |
|
SU1684347A2 |
