1
Изобретение относится к автоматизации производственных процессов и может иснользоваться в гальванических цехах для нанесения гальванических и химических покрытий.
В настоящее время для программного управления транспортными механизмами гальванических линий находят применение устройства, основанные на шагово-импульсном принципе, при котором приращение программируемого шагового перемещения транспортпого механизма преобразуется в дискретный сигнал. Информация о фактическом положении транспортного мехаиизма на линии последовательно сравнивается с информацией программы по схеме совпадения. Эти устройства содержат блок совпадения сигналов, подключен)1ые к нему программный блок и датчики положения транспортного мехаиизма, функциональный блок управления исполнительным механизмом, первый и второй входы которого соединены соответственно е выходами блока совпадения сигналов и программоносителя, а третий и четвертый - с выходами датчиков положения грузозахватов транепортного механизма и блок выдержки времени, вход которого подключен к выходу программного блока, причем выход функционального блока управления транспортным механизмом соединеп со входами блока выдержки времени и исполнительным механизмо.м.
Предложенное устройство отличается тем, что, с целью повыщеиия его надежности и быстродействия, в нем установлены блок установки программы по циклограмме, два регистра-распределителя и блок сигнализации, подключенный к выходам датчиков положения транспортиого механизма, датчиков положения грузозахватоп транспортного мехаиизма }1 программного блока, входы которого соедииены с выходами регистров-распределителей, подключенных одним) из своих входов к выходу блока установки состояния программы по циклограмме, а другими - к выходу блока совиадеиия сигналов.
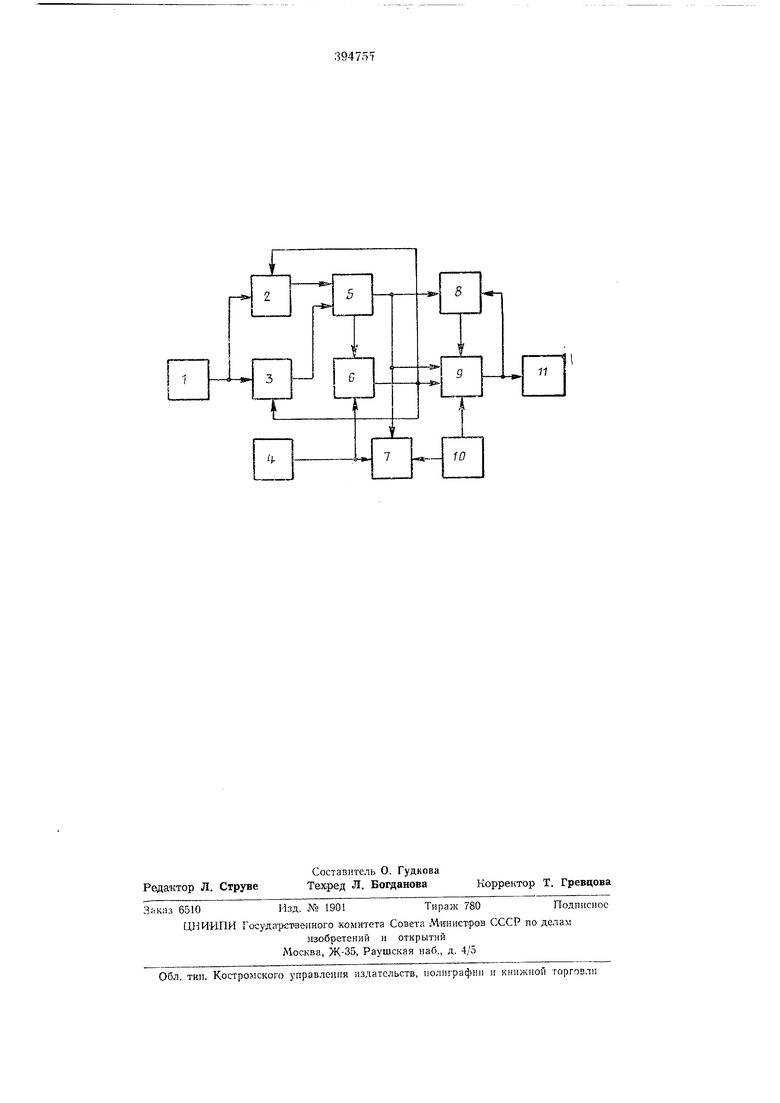
Блок-схема устройства представлеиа на чертеже.
Устройство состоит из следующих основных блоков: блока 1 установки программы по циклограмме; регистров-распределителей 2 и 5; датчиков 4 положения транспортного механизма на линии; программного блока 5; блока 6 совпадения сигналов программоносителя и датчиков положения; блока 7 сигнализации положения транспортного механизма на линии, номера участка циклограммы, на котором выполняется работа и номера подцикла; блока 8 выдержки времени; функционального блока 9 управления исполнительными ыеханиз.мами; датчиков 10 положения грузозахватов транспортного механизма;
исполинтельных механизмов П.
Блок / установкн программы по цнклограмме предназначен для задания в регнстрыраспределителн 2 и 3 информации, обеспечнвающей начало работы транспортного механизма с желаемого участка циклограммы в любом подцикле. Регистры-распределители 2 и 3 предназначены для счета и запоминания импульсов, поступающих из блока 6 совпадения сигналов, а также из блока 1. Числу нмпульсов, поступивших в регистр-распределитель, соответствует сигнал на одной из выходных его шин. В зависимости от участка циклограммы, на котором ведется работа, от одного нз регистров-распределителей на программный блок 5 приходит потенциальный сигнал. Этот сигнал несет в себе информацию о направлении перемещения транспортного меха11нзл а (вперед или назад); о пеобходимостн выдержки времени и ее величине; об адресе (позиции останова); о месте нахождения транспортного механизма па линии; о номере участка циклограммы, на котором пыполняется работа; о выполняемом подцикле. Датчики 4 положения транспортного механизма на линии служат для останова его на позиции II сигнализации места нахождения на лннии. Датчики установлеиы иад ваннами иа каждой позиции останова и связаны с блоком 7 сигнализации и блоком 6. Программный блок 5 служит для шифрацин сигналов, поступающих от регистров-распределителей 2 и J в соответствии с программой работы транспортного механизма. Схема программного блока выполнена так, что каждому сигналу иа входе блока, поступающему мз регнстра-распределителя 2 или 3, соответствует определенное сочетание сигналов но его выходах, которые поступают в блоки 6, 7, 8 н 9. Схема блока 6 выполнена так, что в зависимости от позиции останова, на которой находится транспортнтлй механизм, сигнал сравнення постуиает в один из регистровраспределителей или одпо 5ременио в оба. Блок 7 оппализации необходим для контроля работы устройства. Сигнализация указывает позицию останова, иа которой иа.ходится транспортный меха1И зм, положение его грузозахватов (верхнее или нижнее), номер участка циклограм.мы, на котором выполняется программа и номер выполияемого подцпкла. Блок 7 вместе с блоком / используется для пуска трапспортного механизма в работу с желаемой позиции останова, участка цикло1раммы и подцикла. Блок 8 выдержки времени предназначен для получения требуемых выдержек времени ,в соответствии с циклогра1М мой транспортного механизма. Выход блока 8 связан с блоком 9 и через него имеет обратную связь. ФункцнО1 ал1 ный блок 9 управле:1ия нсполнительиыми мехаитк л1ами обеснечнвает включение пппйодов т)анспорт11ого механнзма «вперед, «назад, «подъем, «опускание и выдержек времени в еоответствии с программой. Датчики 10 положепня грузозахватов предназначепы для фиксации грузозахватов транспортного .механизма в крайних положениях при подъеме и опускании и обеспечивают очередность включения нриводов «опускание или «подъем. Датчики связаны с блоками 7 н 9,
ОЛИ расноложсны на траиснортном механизме, i снолиительные механизмы 11 служат для выполиення команд, поступающих из устройства. Сюда относятся два привода TpaiicHojiTHoro механизма: для горизонтальiioio персмещеции са.мого меха;1И;.ма и верти ;а..- Ы1ого движеиия грузозахватов.
Работа трапспортного механизма осуществ.1иется согласно циклограмме, составленной Г соотвстствнн с технологией гальванических
ироцессов. Циклограмма разбита иа участки, кажды из которых представляет путь транспортного механизма от одной позиции останова до Д1)угой но программе. Рабочий цикл транспортного механизма состоит из определенного количества 1оризонтальных перемещений «вперед и «назад с подъемом или опусканием барабанов на соответствующих позициях останова, благодаря чему детали перемещаются из ванны в ванну. На позициях останова при необходимости осуществляются различные выдержки времени. Весь цикл разбит па п равных нодциклов, отличающихся друг от друга лишь тем, что в каждом из них имеются свои участки обслужива1 ия определенных гальваничееких ванн.
В исходном состоянии информация в регистрах-распределителях 2 я 3 отсутствует. Пуск трансиортиого механизма производится с ИСХОД1ЮЙ позиции нажатием кнопки «пуск
на пульте управления. При этом сигнал от датч;:ка 4, иа котором находится транспорт1НЫЙ механизм, и еитнал с регистр а-распределителя 2, соответствующий «О, через программный блок 5 приходит в блок совпадення 6. Снгпал сравнения из блока 6 поступает в фу.пкциональный блок 9, включая привод подъема грузозахватов, и в регистр-распределитель 2, устанавливая eio в новое состояиие (запоминая единицу). Сигнал из регистра-расп1)еделителя 2, соответствующий числу «1, постуиает иа программный блок 5, обеспечивая определенные действня транспортного механизма на данном участке HJIKлограммы.
Длительность действия сигнала на выходе
блока сравне П1я 6 определяется вре.менем перехо.:;,а счетчика регистра-распределителя 2
или 3 в новое состояние.
После вынол1 ення операции «нодъем,
транснортный механизм 1;еремсщается к требуемой но программе позиции останова. При прохождении транснортного механизма над каждой позицией останова срабатывает соответствуюлций ей датчтс 4. однако сигнал
от него проходит через блок совпадения 6 лишь в том случае, если транспортный механизм должен остановиться по программе, т. е. если на блок 6 приходит сигнал из программного блока 5. Соответственно и в регистр-распределитель 2 или 3 сигнал из блока 6 поступает не от каждого срабатывающего датчика 4, а лишь от того, на котором остановится транспортный механизм. В зависимости от нозинии останова, на которой находится транспортный мехашвм сигнал сравнения из блока 6 поступает в регистр-распределитель 2 или 3 или одновременно в оба. Та информации о работе транспортного механизма, которая является общей для каждого нз п подниклов, запоминается в рсгнстрераспределнтеле 2 и после каждого подцикла автоматически «стирается, а информация, не являющаяся общей для этих нодцнклов, запоминается в регистре-распределителе 3 и «стирается лишь с началом нового цикла. В любой .момент времени на блок 5 приходит сигнал TOvTbKo от одного регнстра-распределнтеля 2 или 3. В момент нерехода с участка циклограммы, обслуживаемого регистромраспределитсле.м 2 на участок циклограммы, обслуживаемый регистром-расн редел нтел ем 3, сигнал сравнения из блока 6 поступает в оба регистра-распределителя 2 н 3, переводя один из них в нейтральное состояние, а другой - в рабочее. С приходом трансиортного механизма на позицию останова, кратковременный сигнал сравнения из блока 6 поступает в блок 9, обеспечивая отключение нривода движения («вперед или «назад).
В зависимости от сочетания снгналов, поступающих из программного блока 5 на блоки 8 н 9, все .действия транспортного механизма на позиции останова на различных участках циклограммы обеспеч 1ваются функциональным блоком -9 н сводятся к вЕзЩОлненню одной из следующих операций: I - «опусканне ; II - «подъем - выдержка 10 сек;
III- «опусканне - выдержка технологическая - «подъем - выдержка 0 сел:;
IV- выдежка технологнческая - «подъем - выдержка 10 сек (выдержка 10 сек осуществляется всегда нри верхнем положении грузозахватов и необходнма для того, чтобы с барабана стекла жндкость перед переносом его в следующую ванну). После вынолнения любой нз этих четырех операций транспортный механизм совершает горизонтальное перемещение «вперед или «назад до следующей познц1 и останова н т. д. Весь цикл работы выполняется автоматически. Нсобходнмые выдержки получаются в блоке 8. Если и. программного блока 5 есть сигнал необходнлгостн выдержки времени, то с H03inuiH останова транспортно ю механизма включается блок 8. После соответствующей выдержкн, определяемой снгналом с нрограм.много блока 5, с в,1.хода блока 8 па блок
9 при.од1гг снгпал, обеспечнваюнгнй включение привода (по. или опускание грузо:;ахватов) или нривода движения («вперед «наза.п,). С в люченнем одного из указанных нрннодои снгналом с блока 9 блок 8 выдержкн нремеии отключается.
Для нуска транспортного механизма е желаемой позиции останова, участка и подцикла используется блок 1 совместно с блоком 7. На пульте управления расположены сигнальные лампы, указывающие: номер позиции, на которой на.ходнтся транспортный механизм; положение грузо ахватов (верхнее
нлн ннжнее); номера участка циклограммы; номера подциклов. Здесь же на пульте показана табл1Н1а цнфр, соответствующих каждому участку цнклограммы. Путем набора соответствующих цифр, указанных в таблице,
из блока 1 в регистры-распределители 2 и 5 задается соответствующая информация. Для нредупреждения ложного включения исполнительных механизмов в момент задания информацнн вся схема устройства электрически блокируется. Готовность к пуску транспортного механизма с желаемой позиции останова указывает блок 7. Нажатием кнопки «пуск пачннается работа транспортного механнзма но программе.
п р е д мет изобретения
Устройство для программного управления транспортным механизмом гальванической
линии, содержащее блок совпадения снгналов, подключенные к нему программный блок н датчнки положения транспортного механизма, функцнональный блок управления исполнительным механизмом, первый и второн входы которого соединены соответственно с выходами блока совпадения сигналов и нрограммоноентеля, а трети и четвертый - с выходамн датчиков положения грузозахватов транспортного механизма и блока выдержки времени, вход которого подключен к выходу программного б.тока, причем выход функционального блока управлення транспортным .механизмом соедннен со входамн блока выдержкн времени н исполнительным
меха;п1змом, отличающееся тем, что, е целью повышения его надежностн и быстродействия, в нем уетановлены блок установкн программы по цнклограмме, два регнстра-раснределнтеля н блок снгналнзацнп, подклю-ченный к выходам датчиков положения TpaiicnopTHoro механизма, датчиков положения грузозахватов транспортного механизма 11 программного блока, входы которого сое.аннень с вы ход; .ми регмстров-раепределителсП, подкл1очсн Ь;Х одними из своих входов к выходу блока установки программы по циклогрлммс. другими - к выходу блока совпа.теиня сигналов.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления автоматическими линиями обработки деталей | 1983 |
|
SU1135820A1 |
| Устройство для управления автоматическими линиями | 1977 |
|
SU744472A1 |
| Система для программного управления двумя механизмами | 1987 |
|
SU1478192A1 |
| Устройство для управления автоматическими линиями обработки деталей | 1988 |
|
SU1521792A1 |
| Устройство для программного управления транспортным механизмом | 1983 |
|
SU1198459A1 |
| Устройство для программного управления автооператором гальванической линии | 1976 |
|
SU636585A1 |
| Устройство для программного управления транспортным механизмом | 1983 |
|
SU1087959A1 |
| Устройство для программного управления автооператорами гальванической линии | 1979 |
|
SU857935A1 |
| Устройство для программного управления автооператорами гальванической линии | 1987 |
|
SU1429089A1 |
| Устройство программного управления автооператорами многопроцессных автоматических линий гальванопокрытий | 1982 |
|
SU1081243A1 |