Изобретение относится к технологии судоремонта.
Известны устройства для дистанционного контроля за посадкой судна на кильблоки в доке, содержащие датчик, устанавливаемый у кильблока, и выносной сигнальный лрибор, например сигнальную лампу, загорающуюся при касании кильблока судном.
Цель изобретения - осуществлять непрерывный контроль за процессом «осадки судна и положением его относительно опорных поверхностей кильблоков.
Это достигается тем, что датчик выполнен с подпружиненным штоком, совершающим поступательное движение под воздействием оседающего судна, и взаимодействует с потенциометром, изменяющим величину электрического тока на участке цеии выносного амперметра, отградуированного в единицах длины пропорционально величине хода штока.
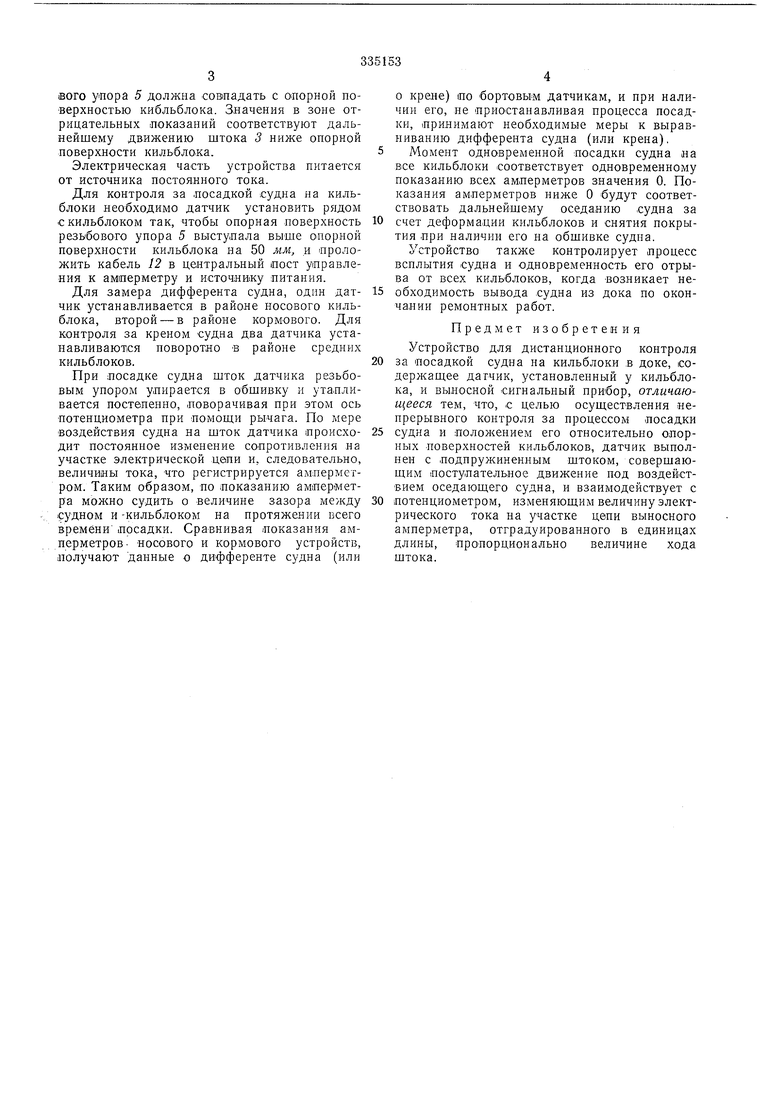
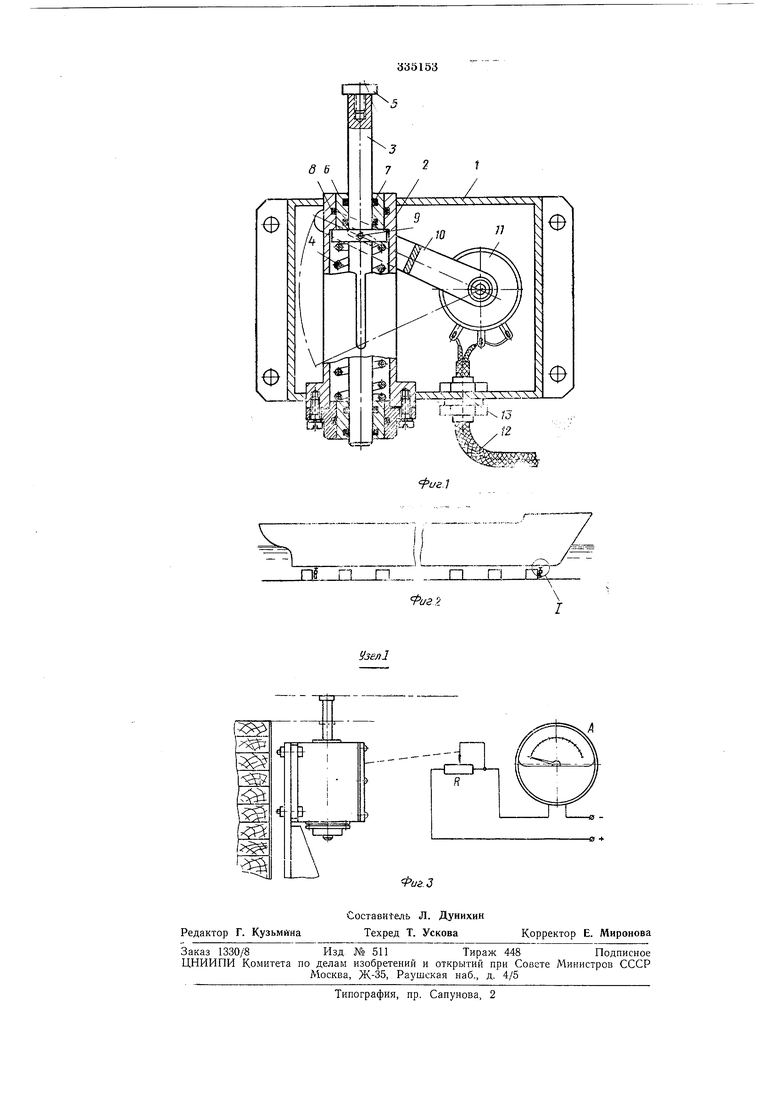
На фиг. 1 изображено устройство для дистанционного .контроля за посадкой судна на кильблоки в доке, разрез; на фиг. 2 - схема установки датчиков для замера дифферента судна; на фиг. 3 - узел установки датчика относительно опорной поверхности кильблока и принципиальная электрическая схема устройства.
предназначенный для размещения в нем штока 3, подпружиненного пружиной 4. На выдвинутом конце штока имеется резьбовой упор 5, воспринимающий нагрузку от оседающего судна и передающий ее на шток.
В стакан запрессованы втулки 6, обеспечивающие направление хода штока. Уплотнительные кольца 7 и 5 обеспечивают водонепроницаемость корпуса датчика.
Штифт 9 препятствует вращению щтока и соединяет его шарнирно с рычагом 10. При перемещениях штока штифт перемещается вместе с ним вдоль прорезей, проделанных в корпусе стакана с двух сторон вдоль образующей его. Второй конец рычага насалсен жестко на ось потенциометра 11, которая может вращаться при поступательных движениях штока. Кабель 12 к потенциометру проходит через сальник 13.
Принципиальная электрическая схема устройства включает в себя потенциометр R, размещенный в датчике, и амперметр А, шкала которого отградуирована в миллиметрах. Значение 50 мм соответствует положению штока 3, выдвинутому до отказа из корпуса датчика под действием пружины 4. Значение О соответствует положению штока, утопленного от своего первоначального положения на 50 мм, при этом опорная поверхность резьбоiBoro упора 5 должна совпадать с опорной поверхностью кибльблока. Значения в зоне отрицательных показаний соответствуют дальнейшему движению штока 3 ниже опорной поверхности кильбло ка.
Электрическая часть устройства питается от источника постоянного тока.
Для контроля за .посадкой судна на кильблоки необходимо датчик установить рядом с кильблоком так, чтобы опорная поверхность резьбового упора 5 выступала выше опорной поверхности кильблока на 50 мм, и проложить кабель 12 в центральный лост управления к амперметру и источнику питания.
Для замера дифферента судна, один датчик устанавливается в районе носового кильблока, второй - в районе кормового. Для контроля за креном судна два датчика устанавливаются поворотно В районе средних кильблоков.
При посадке судна шток датчика резьбовым упором упирается в обшивку и утапливается постепенно, поворачивая при этом ось потенциометра нри помош;и рычага. По мере воздействия судна на шток датчика происходит постоянное изменение сопротивления на участке электрической цепи и, следовательно, величины тока, что регистрируется амперметром. Таким образом, по показанию амперметра можно судить о величине зазора между рудном и -кильблоком на протяжении всего времени посадки. Сравнивая показания амперметров- носового и кормового устройств, получают данные о дифференте судна (или
о крене) по бортовым датчикам, и при наличии его, не приостанавливая процесса посадки, принимают необходимые меры к выравниванию дифферента судна (или крена). Момент одновременной посадки судна на все кильблоки соответствует одновременному показанию всех амперметров значения 0. Показания ам.перметров ниже О будут соответствовать дальнейшему оседанию .судна за
счет деформации кильблоков и снятия покрытия .при наличии его на обшивке судна.
Устройство также контролирует процесс всплытия судна и одновременность его отрыва от всех кильблоков, когда возникает необходимость вывода судна из дока по окончании ремонтных работ.
Предмет изобретения
Устройство для дистанционного контроля за посадкой судна на кильблоки в доке, содержащее датчик, установленный у кильблока, и выносной сигнальный прибор, отличающееся тем, что, с целью осуш;ествления непрерывного контроля за процессом посадки судна и положением его относительно опорных поверхностей кильблоков, датчик выполнен с .подпружиненным штоком, совершаюш:им поступательное движение под воздействием оседающего судна, и взаимодействует с потенциометром, изменяющим величину электрического тока на участке цепи выносного амперметра, отградуированного в единицах длины, пропорционально величине хода штока.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для дистанционного контроля за посадкой судна на кильблоки дока | 1980 |
|
SU925756A1 |
| Устройство для дистанционного кон-ТРОля зА пОСАдКОй СудНА HA КильблОКидОКА | 1978 |
|
SU818957A1 |
| ДОКОВОЕ ОПОРНОЕ УСТРОЙСТВО | 2004 |
|
RU2270133C1 |
| ДОКОВОЕ ОПОРНОЕ УСТРОЙСТВО | 1990 |
|
SU1748394A1 |
| СПОСОБ ОСТРОПКИ ПОНТОНОВ К СУДНУ, ТРАНСПОРТИРУЕМОМУ ПО ВНУТРЕННИМ ВОДНЫМ ПУТЯМ | 2015 |
|
RU2582562C1 |
| Устройство для контроля центровки судна в доке | 1982 |
|
SU1063704A1 |
| Опора для корпуса судна | 1979 |
|
SU870247A2 |
| Механизированный гидравлический кильблок | 1978 |
|
SU765112A1 |
| Кильблок | 1987 |
|
SU1474024A1 |
| СИСТЕМА ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ПОСАДКИ АВАРИЙНОГО ПОДВОДНОГО ОБЪЕКТА В НАДВОДНОМ ПОЛОЖЕНИИ В УСЛОВИЯХ КАЧКИ | 1997 |
|
RU2116929C1 |
I
Риг.
