Изобретение относится к швейному машиностроению, в частности к механизмам для перемешения сшиваемых деталей в швейных полуавтоматах с кулачковыми программными устройствами.
Известен механизм для перемеш;еЕия сшиваемых деталей на швейном полуавтомате, состоящий из держателя деталей, кинематически связанного с приводным валом посредством рычажной системы с базисным звеном, эксцентрикового и кулачкового механизмов.
С целью повышения надежности работы предлагаемый механизм снабжен устройством для управления перемешения держателя, выполненным в виде направляюш,ей, установленной на базисном звене и связанной кулачком посредством тяг с тормозными элементами и двуплечих рычагов, причем тормозные элементы связаны шатуном-вилкой, управляемых эксцентриком.
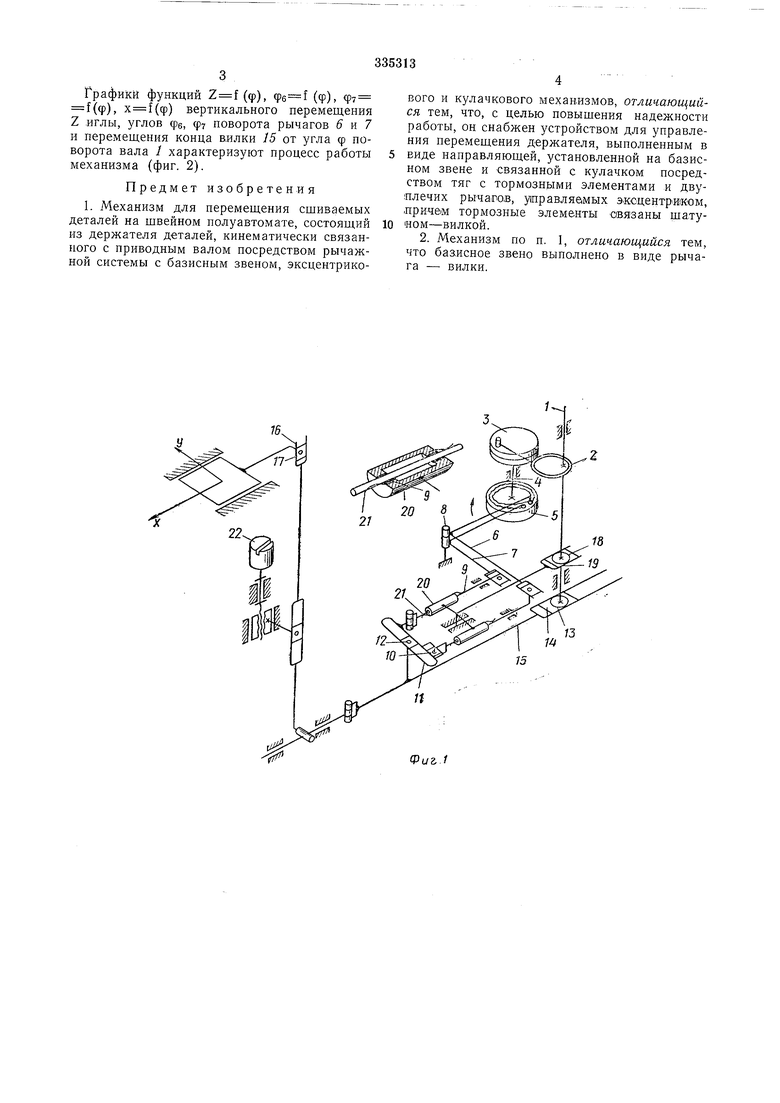
На фиг. 1 дана кинематическая схема механизма для перемешения деталей вдоль платформы; на фиг. 2 - графики перемешения звеньев механизма и иглы.
Кинематическая цепь для перемешения деталей вдоль платформы состоит из вала / эксцентрикового механизма с обгонными муфтами 2, 3, передаюш,его врашение с выстоем распределительному валу 4. На этом валу закреплен кулачок 5, передающий движение
рычагам 6 и 7, качаюшимся вокруг оси 8. Ролики рычагов контактируют с профилем кулачка в точках, смещенных на угол, соответствующий выполнению одного стежка. Вторые концы рычагов и 7 с помощью тяг 9 и 10 соединены с направляющей 11, по которой перемещается ползун 12. На валу / закреплен эксцентрик 13, передающий через сухарь 14 движение вилке 15, конец которой соединен
с вилкой 16, качающейся вокруг горизонтальной оси. Вилка при помощи сухаря 17 соединяется с держателем деталей.
Для устранения передачи усилий во время перемещения деталей механизм снабжен тормозным устройством, состоящим из эксцентрика 18, сухаря 19, вилки-тормозка 20 и четырех пластинчатых пружин 21. Величина перемещения сшиваемых деталей изменяется при помощи випта 22.
Кинематическая цепь для перемещения деталей поперек платформы выполнена аналогично кинематической цепи для перемещения деталей вдоль платформы. Устройство для управления перемещением
держателя деталей может быть использовано в любом механизме для перемещения в двух взаимно перпендикулярных направлениях, т. е. возможно использование одновременно двух механизмов для поперечного и продольного
Графики функций (ф), фб (ф), ф7 (ф), (ф) вертикального перемещения Z иглы, углов фб, ф7 поворота рычагов 6 и 7 и перемещения конца вйлки 15 от угла ф поворота вала / характеризуют процесс работы механизма (фиг. 2).
Предмет изобретения
1. Механизм для перемещения сщиваемых деталей на швейном полуавтомате, состоящий из держателя деталей, кинематически связанного с приводным валом посредством рычажной системы с базисным звеном, эксцентрикового и кулачкового механизмов, отличающийся тем, что, с целью повышения надежности работы, он снабжен устройством для управления перемещения держателя, выполненным в виде направляющей, установленной на базисном звене и связанной с кулачком посредством тяг с тормозньши элементами и двуплечих рычагов, у1правляе|МЫх эксцентрик-ом, .причем тормозные элементы авязаны щатуном-вилкой.
2. Механизм по п. 1, отличающийся тем, что бааисное звено выполнено в виде рычага - вилки.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО для ПЕРЕМЕЩЕНИЯ СШИВАЕМЫХ ДЕТАЛЕЙ В ШВЕЙНЫХ ПОЛУАВТОМАТАХ | 1972 |
|
SU335312A1 |
| Полуавтомат для стачивания деталей по заданному контуру | 1974 |
|
SU506665A1 |
| ШВЕЙНЫЙ ПОЛУАВТОМАТ | 1973 |
|
SU379704A1 |
| ПОЛУАВТОМАТ ДЛЯ ОБМЕТЫВАНИЯ ПЕТЕЛЬ НА ДЕТАЛЯХ ОДЕЖДЫ | 1973 |
|
SU364705A1 |
| Швейный полуавтомат для шитья по контуру | 1989 |
|
SU1730280A1 |
| Швейная машина зигзаг | 1982 |
|
SU1089188A1 |
| Швейный полуавтомат для выполнения фигурных и закрепочных строчек | 1986 |
|
SU1326681A1 |
| Подшивочная машина | 1985 |
|
SU1440987A1 |
| ШВЕЙНЫЙ ПОЛУАВТОМАТ «ШПАС» | 1969 |
|
SU236971A1 |
| Швейная машина зигзаг | 1981 |
|
SU1089187A1 |

Фиг, 1
