Устройство предназначено для управления перемещениями режущего инструмента -стапKOiB с .программным управлением и других рабочих органов автоматических устройств.
Известны многокоординатные линейные интерполяторы, содержандие соединеииые со схемами сравнения регистры и счетчики, кО входам которых через вентили подключены генератор олор-ной частоты; устройство управления и регист р символа, вход которого подключен к источнику информации о кадрах, а выходы соед1И1ены со входами вентилей приема указанных регистров и счетчиков.
В известных устройствах значения приращений координат, определяющие коэффициенты пересчета упра1вляемых делителей частоты, заносятся в регистры делителей и хранятся в них :Во в.ремя интерполирования в одной из позиционных систем счислеиия. С выходов управляемых делителей частоты снимаются импульсы элементарных перемещений.
Однако., так как число импульсов опорной частоты, потребное для отработки перемещений по осям координат, пропорционально произведению приращений по осям координат, то при больших значениях приращений число импульсов опорной частоты становится очень большим. Поэто.му для достижения потребной скорости перемещения ра бочего органа требуется значительно повышать опорную частоту,
что в большинстве случаев исключает при мснение имеющихся интерполяторов. Кроме того, в интерполяторе необходимо иметь регистр для хранения константы, определяющей момент конца интерполирования.
Предложенный интерполятор отличается тем, что содержит присоединенные выходами ко входа м устройства управления схемы анализа нулей счетчиков, входы которых подключены к выходам счетчиков, число которых по каждой координате соответствует количеству оснований системы счисления в остаточных классах, и преобразователи параллельного число-нмпульсного кода в последовательный по числу координат, входы которых соедин-ены с выходами схем срав1нения и со входа.ми сброса счетчиков, а выходы 1иодключены к выходным зажимам устройства.
Это позволяет снизить тактовую частоту и расширить функциональшяе возможности устройства.
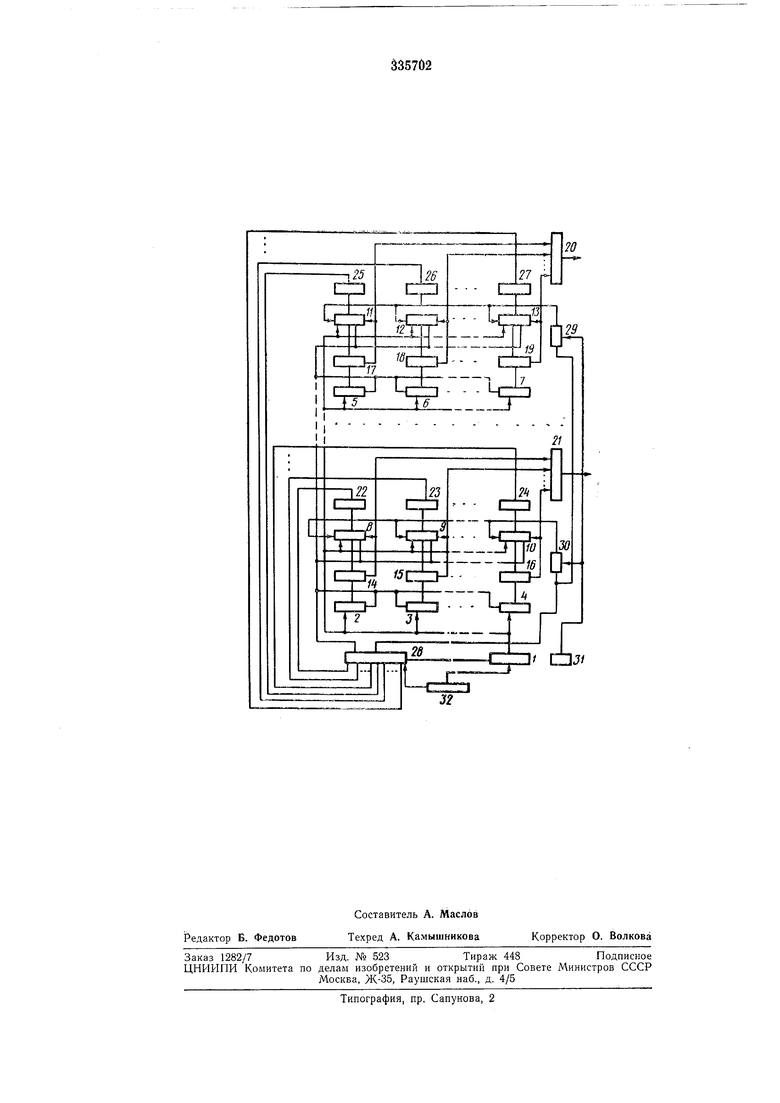
На чертеже приведена блок-схема интерполятора.
Импульсные выходы вентилей о.проса регистра / символа соединены со входами аентилей приема регистров 2-7, в которые заносятся и хранятся в течение времени интерполирования велич1И ы оснований системы остаточных классов, Я1вляющ1иеся коэффициентами пересчета делителей частоты. Эти же имПульсные выходы вентилей опроса .регистра 1 соединены со вход-ами .вентилей .приема счетчиков 8-13, которые перед началом интерполирования устаиавливаются в состоя-пия, соответствующие остаткам, Полученным в результате лреобразоваЕия из лози.ционной системы .счисления в -систему счисления в остаточных классах числа Л по основаниям соответствующих координат.
Выходы триггеров регитров 2-7 и счетчиков 8-13 соединены соответственно со входами схем .сравнения 14-19. Им.пульсные выходы схем сравнения 14-19 соед,ине.ны с цепями сброса счетчиков 8-13, а также .подключены ко входам |П,рео.бразователей 20 и 21, -служащих для объединения всех импульсов элементарных |Пере1меще.ний одной координаты. Если сигнал «появляется одновременно на .выходах нескольких схем сравнения, преобразователи 20 и 21 формируют последовательность .импульсов на выходной шине, в которой столько - мпульсо,в, сколько пришло одновременно на все их входы.
Выходы триггеров счетчиков 8-13 сое.динены со входами схем анализа нулей 22-27, выходы которых соединены со входами блока управления 28 для определения момента окончания интерполяции, так как .после .подачи импульсов опорной частоты на входы всех счетчиков 8-13 делителей частоты одной координаты все эти счетчики устанавливаются в нулевое состояние. Выходы бло.ка управления 28 соединены с управляющими входами вентилей приема регистров 2-7 и счетчиков 8-13 € управляющими входами вентилей опорной частоты 29 и 30, выходы которых соединены со 1входами соответственно счетчиков //-13 и 8-10, а входы - с выходом генератора опорной частоты 31. Управляющие входы вентилей опроса и приема регистра / символа соединены с выходом блока управления 28. Информационные выходы источника информа ции 32 о кадрах интер.полятора соединены со входами вентилей приема регистра 1 символа, а синхронизирующий выход-со входом .блока управления 28.
Интерполятор работает следующим образом.
Перед «началом интерполирования из источника информации 32 о кадрах интерполятора в регистры 2-7 и в счетчики 8-13 заносятся соЬтветственно основания системы счисления в остаточных классах, причем для каждой координаты имеется своя система оснований, и остатки, полученные в результате преобразования числа А из позиционной системы счисления в систему счисления в остаточных
классах. Остаток, соответствующий определенному основанию, заносится в счетчик того делителя частоты, в регистре .которого находится это основание. Таким образом, в счетчиках делителей частоты одной координаты находится число А, выраженное в системе остаточных классов по соответствующим основаниям. Основания, находящиеся в регистрах 2-7,
задают коэффициенты пересчета соответствующих им счетчнков 8-13.
При .подаче импульсов опорной частоты от генератора 31 через вентили 29 и 30 на входы счетчиков 8-13 и равенстве содержимого
счетчиков 8-13 соответственно содержимому регистров 2-7 соответствующие схемы сравнения 14-19 сбрасывают свои счетчики в нуль, и импульсы с их выходов поступают на входы преобразователей 20 и 21, с выходов
которых они попадают на приводы соответствующих коордииат. МоМент окончания интерполирования определяется по равенству улю одновременно всех счетчиков данной координаты. Сигналы со схем анализа нулей
22-27 поступают в блок управления 28, который блокирует .прохождение импульсов опорной частоты от генератора 31 через вентили 29 и 30 соответственно на счетчики 11- 13 и 8-10.
Предмет изобретения
Многокоординатный линейный интерполятор с .кодированием информации в системе счисления в остаточных классах, содержащий соединенные со схемами сравнения регистры и счетчики, ,ко входам которых через вентили подключены генератор о-порной частоты, устройство управления и регистр символа, вход которого подключен к источнику информации о кадрах, а выходы соединены со входами вентилей .приема указанных регистров и .счетчиков, отличающийся тем, что, с целью снижения тактовой частоты, он содерл ит присоединенные выходами ко входам устройства управления схемы анализа нулей счетчиков, входы которых подключены к выходам счетчиков, число .которых по. каждой координате
соответствует .количеству оснований системы счислеиия в остаточных классах, и преобразователи параллельного число-импульсного кода в .последовательный по числу координат, входы которых соединены с выходами схем
сравнения и со входами ci6po.ca счетчиков, а выходы подключены к выходным зажимам устройства.
| название | год | авторы | номер документа |
|---|---|---|---|
| Многоканальный интерполятор для программного управления многокоординатным станком | 1978 |
|
SU746429A1 |
| Круговой интерполятор для контурных систем программного управления станками | 1973 |
|
SU499556A1 |
| Круговой интерполятор | 1978 |
|
SU798730A1 |
| Генератор векторов для системы отображения графической информации | 1974 |
|
SU525980A1 |
| Линейный интерполятор для цифровых двухкоординатных систем програмного управления | 1973 |
|
SU499555A1 |
| Линейный интерполятор | 1976 |
|
SU651318A1 |
| Цифровой линейный интерполятор | 1975 |
|
SU529458A1 |
| ФУНКЦИОНАЛЬНЫЙ ПРЕОБРАЗОВАТЕЛЬ | 1966 |
|
SU216369A1 |
| Цифровой линейный интерполятор | 1980 |
|
SU875341A1 |
| Линейный интерполятор | 1975 |
|
SU543922A1 |