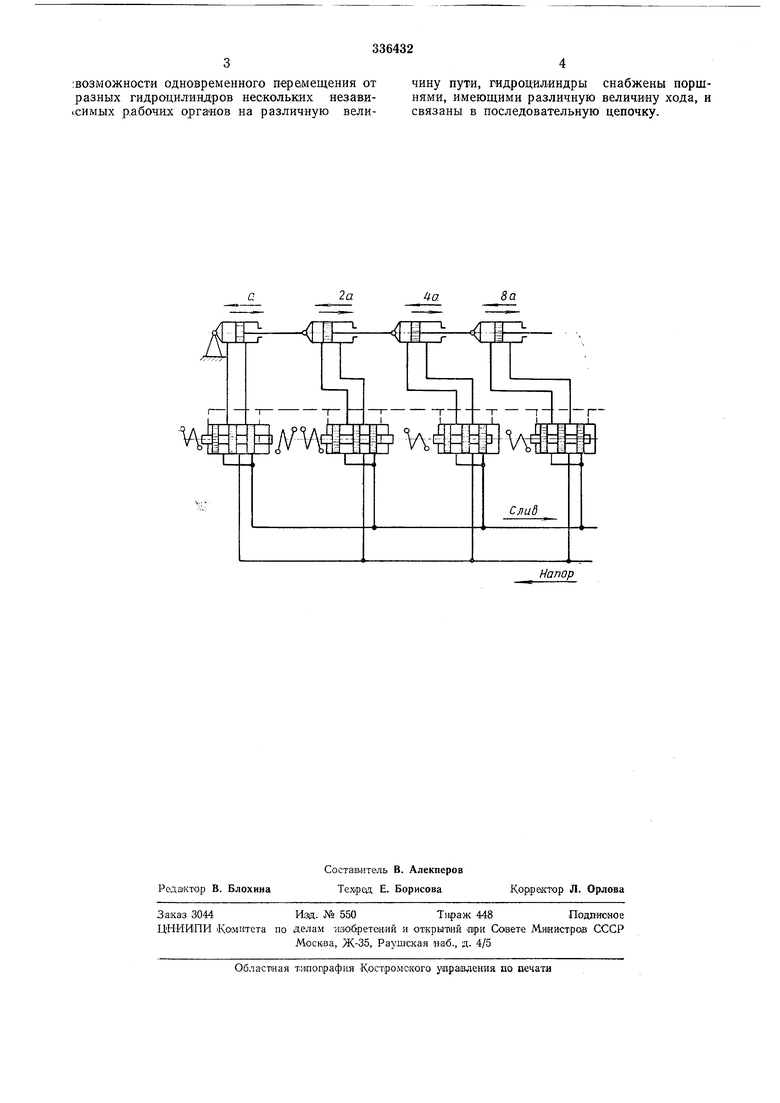
Изобретение относится к разомкнутым электрогидравлическим системам, в которых необходимо ступенчатое перемещение рабочего органа с определенными шагами и жесткой фиксацией в каждой промежуточной позиции. Такая система может применяться, например, для перемещения подвижной пилы обр-езного станка с целью ступенчатого изменения расстояния между пилами для получения ширин обрезных досок в соответствии со стандартом. Известны электрогидравлические механизмы дискретного действия, включающие гидроцилиндры, управляющие золотники и рабочие органы, напри мер пилы. Недостаток известных механизмов заключается в том, что выходное усилие можно снимать только с одной точки механизма. С целью обеспечения возможности одновременного перемещения от разных гидроцилиндров нескольких независимых рабочих органов на различную величину пути в предлагаемом механизме гидроцилиндры снабжены порщнями, имеющими различную величину хода, и связаны в последовательную цепочку. На чертеже показана схема предлагаемого механизма. дами, каждый из которых управляется электромагнитным золотником. Ступенчатое перемещение рабочего органа достигается за счет суммирования и вычитания рабочих ходов гидроцилиндров и зависит от сочетаний включений управляющих золотников. Диапазон общего перемещения определяется принятым количеством гидроцилиндров цепочки и выбранной величиной ходов их поршней. На схеме показана система, работающая по принципу двоичного хода, когда каждый последующий гидроцилиндр имеет удвоенный ход иорщня (а, 2а, 4а, 8а), благодаря чему каждая ступень перемещения имеет величину а. Число ступеней при четырех гидроцилиндрах равно 15 (при трех гидроцилиндрах - 7, при двух - 4). В общем случае механизм может иметь любое число гидроцилиндров с любыми ходами порщней. Золотники могут иметь управление и, от кулачков, а также ручное. Предмет изобретения Электрогидравлический механизм дискретного действия, включающий гидроцилиндры,управляющие золотники и рабочие органы, отличающийся тем..,, что , с целью обеспечения
:возможности одновременного перемещения от разных гидроцилиндров нескольких незави1СИМЫХ рабочих органов на различную величину пути, гидроцилиндры снабжены поршнями, имеющими различную величину хода, и связаны в последовательную цепочку.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО для ДИСКРЕТНОГО ПЕРЕМЕЩЕНИЯ РАБОЧИХ ОРГАНОВ | 1970 |
|
SU259345A1 |
| УСТРОЙСТВО для ПЕРЕМЕЩЕНИЯ И УСТАНОВКИ ПИЛ | 1971 |
|
SU315594A1 |
| Электрогидравлический шаговый привод | 1971 |
|
SU481712A1 |
| Устройство для переключения ступеней в коробке передач | 1986 |
|
SU1346459A1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД | 2004 |
|
RU2262467C1 |
| ГИДРАВЛИЧЕСКИЙ СЕРВОПРИВОД УПРАВЛЕНИЯ ГУСЕНИЧНЫХ МАШИН | 1966 |
|
SU188311A1 |
| Электрогидравлический следящий привод системы автоматического управления органами стабилизации движения судна | 1976 |
|
SU610725A1 |
| ИСПОЛНИТЕЛЬНЫЙ МЕХАНИЗМЭЛЕКТРОГИДРАВЛИЧЕСКОГО СЛЕДЯЩЕГО ПРИВОДААВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ОБЪЕКТАМИ | 1972 |
|
SU427885A1 |
| Гидравлический шаговый привод | 1971 |
|
SU477260A1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ ВИБРАТОР | 1970 |
|
SU280946A1 |
За
4о
€ 5Kffiff
СмиВ
Напор
