HSiaeiCTiHbi для скользящего интепрального усреднения фуикций, -содержащи-е стабилизироваиный источник питания, выходной интегратор ,и шоследоеательный регистр сдвига, рабочий и управляющие входы которого подключены через частотные преобразователя соответственно к выходам источников силналов подиитецральной функции и аргумента. Однако эти устроЙ1СТ1ва сложны и недо1стат|0чно надежны.
Предлагаемое устройство отличается от известных тем, что содержит сумматор состояний ячеек регистра сдвига, вход которого подключен iK стабилизированному источнику питания, (выход соединен с индикатором, а управляющие входы гарисоединанЫ к въ1.хода1М ячеек паследовательного регистра сдвига.
Это позволяет упростить процесс изменения И1нтер1вала усреднения |П:ри аналоговой фо|р(Ме нредставлвния результата -вычислений.
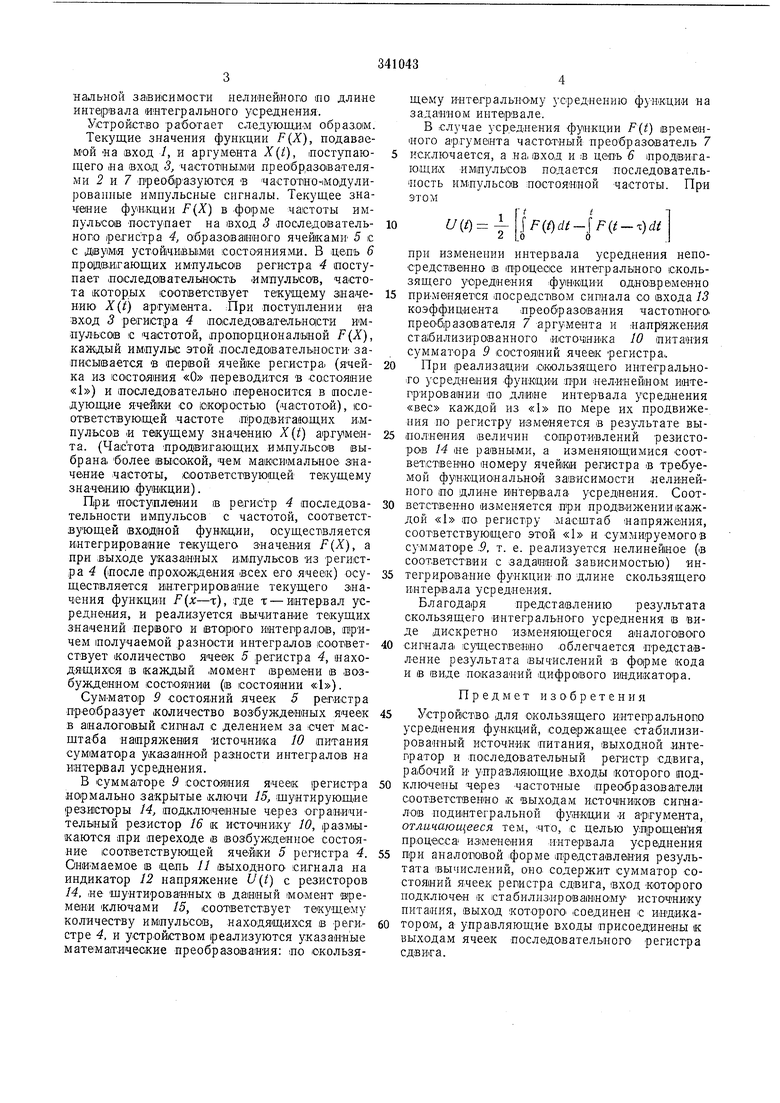
На -фиг. 1 Приведена схема устройства; на фиг. 2 - схема сумматора состояний ячеек .последовательного регистр а.
Вход I текущего значения функции F(Х) через частотный преобразователь 2 соединен со входом 3 последовательного регистра 4, образованного ячейками 5 с двумя устойчи(вымя состояеиямн. Цепь 6 продвигающих импульсов регистра 4 через частотный преобразователь 7 (или непосредственно) соединена
со входом 8 текущего значения аргумента X(t).
Выходы ячеек 5 последовательного регистра 4 подключены к сумматору 5 состояния ячеек регистра, соединенному со стабилизированным источником 10 питания, цепью 11 выходного сигнала устройства и индикатором 12 результата скользящего интегрального усреднения на интервале г.
Для изменения интервала усреднения, задаваемого со входа 13 устрО1Й1СТ1ва, частотный преобразователь 7 аргумента выполнен с управляемым коЭф|фициентом преобразования, а стабилизированный источник 10 питания
выполнен регулируемым.
Сумм-атор 9 состояний ячеек 5 регистра 4 вы1полнен IB виде подключенной к 1стабилиз,ированному источнику 10 питания цепи резисторов 14, коммутируемых ключами 15, которые управляются ячейками 5 последовательного регистра 4 (резистор 16 - ограничительный). К резисторам 14 подключены цепь 11 выходного сигнала и индикатор 12. Для обеспечения скользящего интегрального усреднения функции лри нелинейном инте лрировании по длине интервала усреднения сопротивления резисторов 14 сумматора 9 состояний ячеек 5 регистр-а 4 выполнены из 1еняющимися по величине соответственно нональНой зависимости нелниейного ио длине интервала интегралыното усреднения.
Устройство рабОтает следующи м обраэлм.
Текущие значения функции F(X), подаваемой На вход /, и аргумента X(t), поступающего на вход 3, частотными прео бразо1ваТелями 2 и 7 лреобразуются в частотно-людулированиые импульсные сигналы. Текущее значение функции F(X) в форме частоты импульсов поступает на вход 3 .последовательного регистра 4, огбразоваганого ячейками 5 с с двумя устойчивыми cOiCTOflHHHMH. В цепь 6 продвигающих имлульсов регистра 4 поступает (Последовательность .импульсов, частота которых соответствует текущему зна-чению X(t) ар1гуме1нта. Лри поступлении иа вход 3 perHCTipa 4 1ПО|Следо1ва,тельно|Сти импульсов с частотой, пропорциональной F(X), каждый импулыс этой последовательности записывается В первой ячейке регистра, (ячейка из состояния «О переводится в состояние «1) и лоследователыно переносится в последующее ячейки со скоростью (частотой), соответствующей частоте продвигающих нмпульсоз и текущему значению X(t) аргумента. (Частота продвигающих импульсов выбрана, более высокой, чем максимальное значение частоты, соответствующей текущему значению функции).
При по.ступлении IB регистр 4 последовательности импульсов с частотой, соответствующей входной фушодии, осуществляется интегрирование текущего значения F(X), а при выходе указанных и:м1пульсов из регистра 4 (после прохождения всех его ячеек) осуществляется интегрирование текущего значения функции Р(х-т), где т - интервал усреднения, и реализуется вычитание текущих значений первого и второго имтепралов, nipHчем получаемой разности интегралов соответствует количество ячеек 5 регистра 4, находящихся IB каждый .момент (времени в возбужде ннам состоянии (в (состоянии «1).
Сумматор 9 состояний ячеек 5 регистра прео1бразует количество возбужденных ячеек в аналоговый сипнал с делением за счет масщтаба напряжения источника 10 питания сумматора указанной разности интегралов на интервал усреднения.
В cyMMaiTOpe 9 состояния ячеек регистра нормально закрытые ключи 15, шунтирующие резисторы 14, подключенные через огран.ичительный резистор 16 к источнику 10, размыкаются при переходе в возбуж:денное состояние соответствующей ячейки 5 регистра 4. Снимаемое IB цепь // выходного сигнала на индикатор 12 напряжение U(t) с резисторов 14, не шунтированных в данный момент времени ключами 15, соответствует текущему количеству импульсов, находящихся в реги.стре 4, и устройством реализуются указанные математические преобразования: по скользящему ИНте|Гральн.ому }среднению функции на заданном интервале.
В случае усреднения функции F(t) временного аргумента частотный преобразователь 7 ис.ключается, а на. вход и в цепь 6 продвигающих импульсов подается последовательiiiocTb импульсов постоянной частоты. При этом
U((di-lF(t-)dt
при изменении интервала усреднения непосредственно в 1Проце1асе интегрального скользящего усреднения |фун.к.цИИ одновременно
применяется пО|Средством сипнал а со входа 13 коэффициента преобразования частотного. преОбразоиателя 7 аргумента и на;пр яжен.ия стабилизированного источ1ника 10 питания сумматора 9 состояний ячеек регистра,.
При реализации скользящего интегрального усреднения функции при нелинейно интегрировании по длине интервала усреднения «вес каждой из «1 по мере их продвижения по регистру изменяется в результате выполнения величин сопротивлений резисторов 14 не равными, а изменяющимися соответственно номеру ячейки регистра в требуемой функциональной зависимости .нелинейного по длине интервала усреднения. Соответственно изменяется при продвижениика.ждой «1 по регистру масштаб напряжения, соответствующего этой «1 и суммируемого в сумматоре .9, т. е. реализуется нелинейное (.в соответствии с заданной зависимостью) интегрирование функции по длине скользящего И|Н т ерв а л а у ср едн ени я.
Благодаря представлению результата скользящего интегрального усреднения в виде дискретно изменяющегося аналогового
сигнала, существенно облегчается цредставление результата вычислений в форме кода и в виде показаний цифрового индикатора.
Пред.мет изобретения
Устройство для скользящего интегрального усреднения функций, содержащее стабилизированный источник питания, выходной интегратор и последовательный регистр сдвига, ра.бочий и- управл1Я.ющие входы которого подключены через частотные преобразователи соответственно к выходам источ1ников сипналов подинтегральной функции и аргумента, отличающееся тем, что, с целью упрощания процесса- из1менения интервала усреднения
нри аналоловой |форме представлания результата вычислений, оно содержит сумматор состояний ячеек регистра сдвига, вход которого подключен к стабилнз.ирова1Нно Му источнику питания, выход которого .соединен с индикатором, а управляющие входы присоединены к выходам ячеек последовательного регистра сдвига.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для дифференцирования функций | 1972 |
|
SU442492A1 |
| Устройство для управления процессом дозирования компонентов агломерационной шихты | 1974 |
|
SU513346A1 |
| Устройство для анализа состояния фурменной зоны доменной печи | 1974 |
|
SU487127A1 |
| УСТРОЙСТВО ДЛЯ МОДЕЛИРОВАНИЯ ПЕРЕМЕЩЕНИЯ ВЕЩЕСТВА В ДВИЖУЩЕЙСЯ СРЕДЕ | 1973 |
|
SU407347A1 |
| Устройство для управления процессом дозирования компонентов агломерационной шихты | 1973 |
|
SU510694A1 |
| Устройство для контроля и управления режимом работы роторного комплекса | 1986 |
|
SU1421837A2 |
| Анализатор сигнала тактовой синхронизации | 1990 |
|
SU1781834A2 |
| Устройство для автоматизированного контроля силового режима металлоконструкций машин роторных комплексов | 1984 |
|
SU1209772A1 |
| Устройство для контроля и управления режимом работы роторного комплекса | 1984 |
|
SU1180461A1 |
| ВСЕСОЮЗНАЯ 'mmm^j^mrirmu | 1973 |
|
SU374549A1 |
I-./5
JXJ-;,,
I
„r--,,.. г...L ---.-Jr
I /2 „
Ij .
Ф/./г.
