11
Изобретение относится к области черной металлургии, в частности « технологии агломеip а цл QHH о го п р оизв о дств а.
Известно устройство для автоматического рег}лироваН(Ия дозированием компонентов шихты, содержащее измерители скорости движения питателя и движения ленты конвейера, выход которого подключен ко входу блока умножения, второй вход которого подсоединен к. выходу датчика погон«ой напрузки конвейера, и задатчик, подключенный ко входу регулятора, 1ВЫХОД которого подсоединен к исполнительному механизму.
Однако известное устройство осуществляет дискретное усреднение, а не непрерывное скользящее, и оно неспособно изменять период усреднения в за висимости от периода помех и поэтому не может подавлять колебания расхода на частотах ниже определенного, жеCTIKO заданного, порога.
Целью настоящего изобретения является повыщение точпости работы устройства.
Предложенное устройство отличается от известного тем, что в него дополнительно введены последовательно соединенные делитель частоты, сдвиговый регистр и суммирующий преобразователь и источник регулируемого напряжения, выходы которого подсоединены ко входам сдв1игового регистра и суммирующего преобразователя, выход которого подключен ко второму входу реа1улятора, а выходы измерителей скорости движения питателя и ленты конвейера подсоединены ко входам делителя частоты, выход блока умножения
подсоедиенн к основному входу сдвигового регистра.
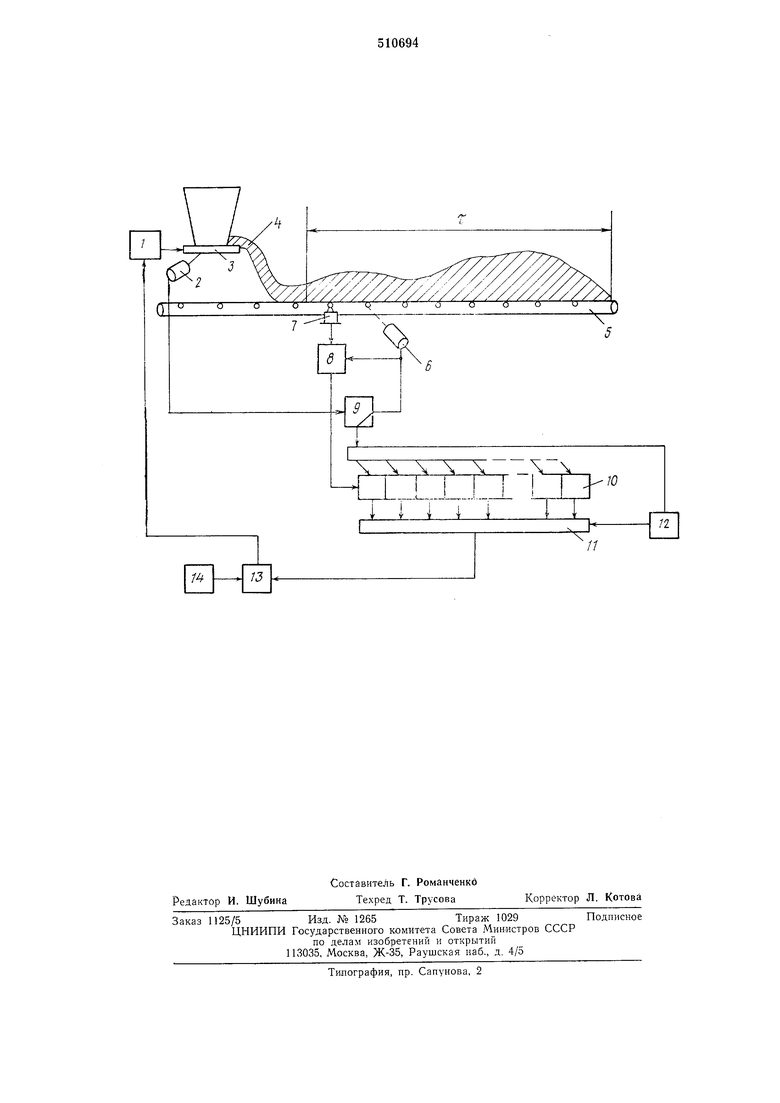
На чертеже представлена схема устройства, состоящего из исполнительного механизма 1, измерителя 2 скорости движения питателя 3,
с которого дозируется материал 4 на сборочный конвейер 5, на котором установлены измеритель 6 скорости движения ленты, датчик 7 пого:нной нагруэюи конвейера к блок умножения 8 с частотным выходом.
В состав устройства входит как основной его узел, делитель частоты 9, сдвиговый регистр 10 и суммирующий преобразователь 11; источник регулируемого напряжеия 12. Обязательными функциональными узлами устройства управления всегда являются регулятор 13 и задатчик 14.
Устройство работает следующим образом.
Каждая ячейка сдвигового регистра 10
приобретает состояние, которое определяется
вы.ходным частотным сигналом блока умножения 8, пропорциональным текущей производительности конвейера 5. По имиульсам от делителя частоты 9 происходит перемещение последовательности состояния ячеек вдоль
сдвигового регистра синхронно с движением
потока материала, так/как частота имлульсов пропорциональна скорост1И ленты сборного коивейера 5.
Поскольку каждый импульс выходного частотного сигнала блока умножения 8, соответствующий текущей производительности и поступающий .на основной вход сдвигового регистра 10, соответствует определенному количеству материала, прощедшего через сечепие, в котором установлен датчик 7 (в соответствии с масщтабом преобразования), то текущее значение количества возбужденных ячеек регистра отражает интегральное количество материала на длине конвейера, соответствующей интервалу усреднения, а текущее значение выходного напряжения суммирующего преобразователя состояния ячеек пропорционально результату скользящего интегрального усреднения производительности конвейера.
Интервал непрерывного скользящего интегрального усреднения благодаря связи делителя частоты с датчиком скорости рабочего органа питателя автоматически устанавливается кратным периоду движения последнего, т. е. периоду возмущающего воздействия.
Таким образов, благодаря предложенному выполнению устройства обеспечивается непрерывное формирование интегрального усреднения сигнала обратной связи для системы автоматического формирования при синхронизации интервала скользящего интегрирования с периодом помехи, что полностью исключает
возможность возникновения автоколебаний в системе и приводит к повышению качества шихты, стабилизации режима работы спекательной мащины и стабилизации параметров агломерата.
Формула изобретения
Устройство для управления процессом дозирования компонентов агломерационной щихты, содержащее измерители скорости движения питателя и движения ленты конвейера, выход которого подключен ко входу блока умножения, второй вход которого подсоединен
к выходу датчика ногонной нагрузки конвейера, и задатчик, подключенный ко входу регулятора, выход которого подсоединен к исполНИтельнОМу механизму, отличающееся тем, что, с целью повыщения точности
работы устройства, ш него дополнительно введены последовательно соединенные делитель частоты, ,од1виговый регистр и суммирующий преобразователь и источник регулируемого напряжения, выходы
которого подсоединены ко входам сдвигового регистра и суммирующего преобразователя, выход которого подключен ко второму входу регулятора, а выходы измерителей скорости движения питателя и ленты конвейера подсоединены ко входам делителя частоты, выход блока умножения подсоединен к основному входу сдвигового регистра. 7-ф- оо ООО
N .
ю TCJ и
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления процессом дозирования компонентов агломерационной шихты | 1974 |
|
SU513346A1 |
| Устройство для автоматического управления роторным экскаватором | 1980 |
|
SU876867A1 |
| Устройство для автоматическогоОпРЕдЕлЕНия удЕльНОй эНЕРгОЕМ-КОСТи РАбОчЕгО пРОцЕССА МАшиНы | 1979 |
|
SU810898A1 |
| Устройство для автоматического управления роторным экскаватором | 1980 |
|
SU899763A1 |
| Устройство для контроля и управления режимом работы роторного комплекса | 1986 |
|
SU1421837A2 |
| Система автоматизированного управления роторным экскаватором | 1983 |
|
SU1164374A1 |
| УСТРОЙСТВО ДЛЯ МОДЕЛИРОВАНИЯ ПЕРЕМЕЩЕНИЯ ВЕЩЕСТВА В ДВИЖУЩЕЙСЯ СРЕДЕ | 1973 |
|
SU407347A1 |
| Способ формирования управляющего воздействия на привод поворота роторной стрелы роторного экскаватора и устройство для его осуществления | 1984 |
|
SU1469030A1 |
| Устройство для измерения статической нагрузки на конвейере | 1984 |
|
SU1571411A2 |
| Устройство для автоматического управления роторным экскаватором | 1987 |
|
SU1434039A1 |