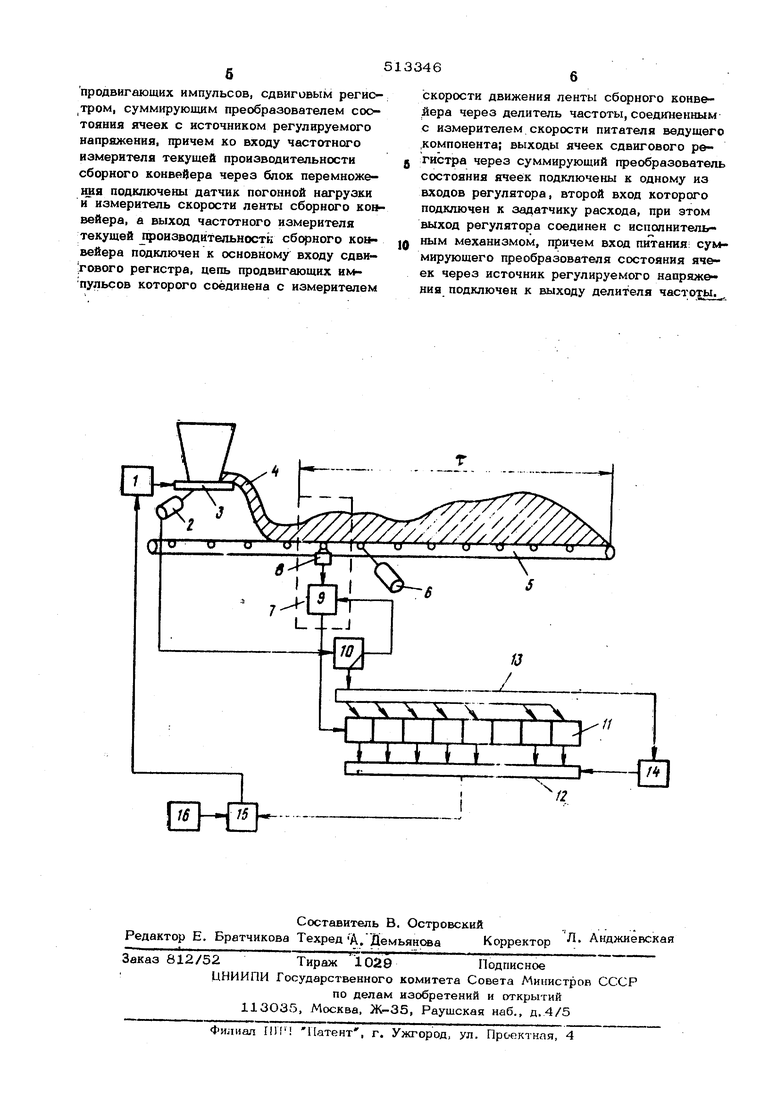
(54) УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ПРОЦЕССОМ ДОЗИРОВАНИЯ КОМПОНЕНТОВ АГЛОМЕРАЦИОННОЙ ШИХТЫ тором, делителем частотьГ с двумя входами, одним из которых он соединен с измерителем скорости движения питателя, а другим - с измерителем скорости движения ленты конвейера и источником регулируемого напряжения. Таким образом, предложенное устройство учитывает не только изменение нагрузки на сборном /конвейере, но также изменение его скорости и изменение скорости питатела и Т1Х Час сйШё ШктрйТ Уёреднёние ; осуществляется непрерывно ( ) Р® жиме скользя1цегр| интегрирования, что можН н6 проиллюстрировать) следующим выражением: . 1 .tt)dt , ш; t-t где q.. - производительность при непрерывном усреднении; cj,(t)- текущая производительность питателя; . 1 - интервал интегрирования, величина которого переменна, так как она является функцией частоты помех: При автоматической синхронизации интервала скользящего интегрального усреднения с периодом помехи в предложенном устройстве реализуется следующее соотношение:t-«v где Tfi - период движения (время полного оборота) рабочего органа питателя; К «Ij2..,-отношение интервала усредне ния к периоду помехи. На чертеже представлена схема описываемого устройства. Оно состоит из исполнительного механизма 1, измерителя скорости движения 2 питателя 3, с которого дозируется материал 4 на сборный конвейер 5, на котором установлены измеритель 6 скорости движения ленты и измеритель 7 текущей производительности с датчиком 8 погонной нагрузки конвейера и узлом 9 перемножения с частотным выходом. В состав устройства входит, как основной его узел, делитель частоты 10, сдвиговый регистр 11 и суммирующий преобр зователь 12 состояния ячеек (сумматор), цепь управления 13 источника 14 регулируемого напряжения. Обязательными функциональными узлами устройства управления всегда является регулятор 15 и задат .чик 16, 64 Устройство работает следующим образом. Каждая ячейка сдвигового регистра 11 приобретает состояние, которое определяется частотным сигналом измерителя 7 текущей производительности сборного кон вейера 5. По импульсам от делителя чаототы 10 происходит перемещение последовательности состояния ячеек вдоль сдвигового регистра 11 синхронно с движением потока материала, так как частота импульсов пропорциональна скорости-ленты сборного конвейера 5. Поскольку; каждый импульс измерителя 7 текущей производительности, поступающий на основной вход сдвигового регистра, Соответствует определенному количеству материала, прощедииего через сечение, в котором установлен датчик 8, (в соответ ствии с масштабом преобразования) то текущее значение количества возбужденных ячеек регистра отражает интегральное количество материала на длине конвейера, соответствующей интервалу усреднения, а текущее значение выходного напряжения суммирующего преобразователя 12 состояния ячеек пропорционально результату скользящего интегрального усреднения производительности конвейера. Интервал непрерывного скользящего интегрального усреднения благодаря связи делителя частоты скорости рабочего органа питателя автоматически устанавливается кратным периоду движения последнего, т.е. периоду возмущающего воздействия. Таким образом, благодаря предложенному устройству обеспечивается непрерывное формирование интегрального усреднения сигнала обратной связи для системы авто- матического формирования при синхрониз ции интервала скользящего интегрирования с периодом помехи, что полностью/исключает возможность возникновения автоколебаний в системе и приводит .к повышению качества шихты, стабилизации режима рвгботы спекательной машины и стабилизации 1параметров агломерата. Формула изобретения Устройство для управления гфоцессом дозирования компонентов агломерационной шихты, содержащее частотные измерители погонной нагрузки, скорости движения и текущей производительности сборного конвейера шихтового отделения, блок перемножения, измеритель скорости питателя ведущего компонента, задатчик расхода, регулятор и исполнительный механизм, о т - личающееся Te.v, что, с целью повышения качества шихгы, оно |снабжено делителем частоты, цепью
продвигающих импульсов, сдвиговым регистром, суммирующим преобразователем соотояыия ячеек с источником регулируемого напряжения, причем ко входу частотного измерителя текущей производительности сборного конвейера через блок перемножения подключены датчик погонной нагрузки и измеритель скорости ленты сборного конвейера, а выход частотного измерителя текущей Jфoизвoдиteпьнocтк сбс эного конвейера подключен к основному входу сдви гового регистра, цепь продвигающих им пульсов которого соединена с измерителем
скорости движения ленты сборного конвейера через делитель частоты, соединенным с измерителем скорости питателя ведущего .компонента; выходы ячеек сдвигового регнстра через суммирующий преобразователь состояния ячеек подключены к одному из входов регулятора, второй вход которого подключен к задатчику расхода, при этом выход регулятора соединен с исполнительным механизмом, причем вход питания: суммирующего преобразователя состояния ячеек через источник регулируемого напряжения подключен к выходу делителя частоть..
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления процессом дозирования компонентов агломерационной шихты | 1973 |
|
SU510694A1 |
| УСТРОЙСТВО ДЛЯ МОДЕЛИРОВАНИЯ ПЕРЕМЕЩЕНИЯ ВЕЩЕСТВА В ДВИЖУЩЕЙСЯ СРЕДЕ | 1973 |
|
SU407347A1 |
| Устройство для контроля и управления режимом работы роторного комплекса | 1986 |
|
SU1421837A2 |
| Устройство для контроля и управления режимом работы роторного комплекса | 1984 |
|
SU1180461A1 |
| Система автоматизированного управления роторным экскаватором | 1983 |
|
SU1164374A1 |
| Устройство для автоматическогоОпРЕдЕлЕНия удЕльНОй эНЕРгОЕМ-КОСТи РАбОчЕгО пРОцЕССА МАшиНы | 1979 |
|
SU810898A1 |
| Устройство для автоматизированного контроля силового режима металлоконструкций машин роторных комплексов | 1984 |
|
SU1209772A1 |
| Устройство для автоматизированного управления тяговым агрегатом транспортного средства в процессе его загрузки сыпучим материалом | 1979 |
|
SU867822A2 |
| Устройство для дифференцирования функций | 1972 |
|
SU442492A1 |
| Способ управления роторным комплексом и устройство для его осуществления | 1987 |
|
SU1537776A1 |
