Изобретелие от1носится к а-втоматическим системам тракторных атрегатО|В, а именно к следящим системам, обеопечи.вающим автоматическое на правленне движения агрегата вдоль базОВой линии, заданной на местности в той или иной форме.
Известные системы содержат колирующий щуп, связанный через электрогидравлический сервомотор с исполнительными механизмами.
С целью автоматической коррекции лри работе агрегата на склонах система . снабжена дополнительным коиирующим щупом с реверсивной контаКТ|Ной головкой, которая электрически связана через фильтр с реверсивным электрО|Д|ВИ1гателем, а (Последний через передачу соединен с основным копирую1щи|м щупом.
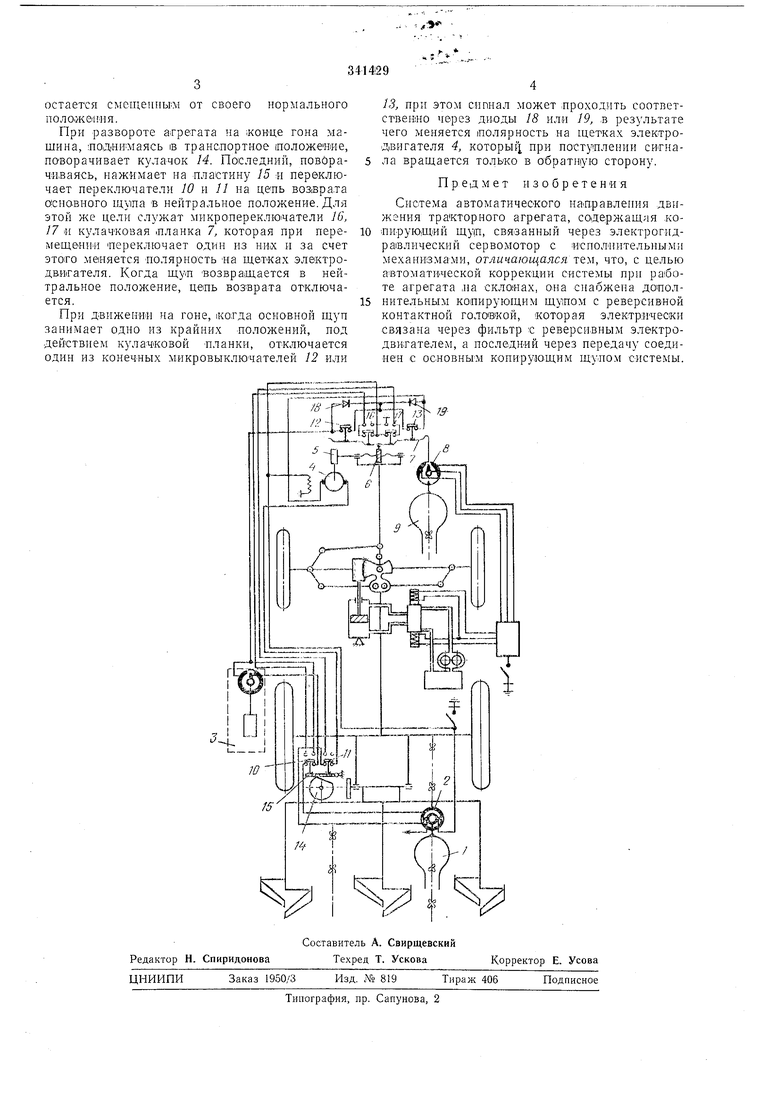
На чертеже изображена принципиальная схема предложенной системы.
Система автоматического направления движения тракторного агрегата им-еет щуп 1 и реверсивную контактную головку 2, электрически связанную через фильтр 3 с реверсивным электродвиГателе-м 4.
Фильтр служит для того, чтобы прО П|ускать только те сигналы, которые возникают в результате смещения агрегата (рабочих органов) на склоне; «при работе по равной местности ои закрыт, и ложные сигналы на вход регулятора система автовождения не получает. Фильтр состоит из а-втоматическоого м.еханизма, неподвижного и подвижного контактов, причем последний имеет маятник. Вращение от электродвигателя через передачу, включающую червячный редуктор 5, передается на
винтовую пару 6 и кулачковую планку 7, жестко соединенную с контактной головкой 8 основного копирующего щупа 9. Сигнал от щупа поступает через электрогидравлический сервомотор на исполнительные механизмы
трактора.
Система работает следующим образом. При смещении рабочих органов машины вниз по склону щуп 1, смонтированный на машине, отклоняется и занимает контакты реверсивной контактной головки, и сигнал через переключатели W, И поступают на фильтр 3, который пропускает только полезные сигналы, возникающие в результате смещения рабочих органов и появления опасности подреза растени я.
Далее сигнал через .конечные микровыключатели 12, 13 поступает в реверсивный электродвигатель. ArpeiraT при этом двигается вверх до тех
пор, пока рабочие органы машины не займут .нейтральное положение. В этом случае контакты реверсивной контактной головки разомкнуты, сигнал на вход системы автовождения не поступает, и агрегат движется только по за
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО КОРРЕКЦИИ АВТОМАТИЧЕСКОГО ВОЖДЕНИЯ СЕЛЬСКОХОЗЯЙСТВЕННОГО АГРЕГАТА ПОПЕРЕК СКЛОНА | 2001 |
|
RU2195097C1 |
| Устройство автоматического вождения сельскохозяйственного агрегата | 1982 |
|
SU1042638A1 |
| Устройство для автоматического вождения машинно-тракторного агрегата | 1980 |
|
SU869595A1 |
| Система автоматизированного вождения колесных машинно-тракторных агрегатов | 1981 |
|
SU1033033A1 |
| СПОСОБ АВТОМАТИЧЕСКОГО ВОЖДЕНИЯ СЕЛЬСКОХОЗЯЙСТВЕННЫХ МОБИЛЬНЫХ АГРЕГАТОВ | 2001 |
|
RU2224396C2 |
| Способ автоматического вождения самоходной машины и устройство для его осуществления | 1989 |
|
SU1748682A1 |
| Устройство для управления движением трактора | 1980 |
|
SU1014489A1 |
| Система автоматизированного вождения машинно-тракторных агрегатов | 1982 |
|
SU1060130A1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО ВОЖДЕНИЯ МАШИННО-ТРАКТОРНОГО АГРЕГАТА | 2000 |
|
RU2181232C1 |
| Устройство для оценки качества автовождения сельскохозяйственного агрегата | 1984 |
|
SU1186101A1 |
