Изобретение относится к сельскохозяйственному машиностроению, в частности к способам и устройствам для автоматического вождения самоходных машин
Известен способ автоматического направления движения тракторных агрегатов, включающий автоматическое определение сигнала ошибки слежения (рассогласование с заданной траекторией), его обработку и формирование регулирующего воздействия для направления движения тракторного агрегата (самоходной машины) в сторону уменьшения ошибки
Недостатком данного способа является то, что при работе тракторного агрегата на склоне снижается точность автоматического вождения из-за появления статической ошибки, вызванной поперечным сползанием тракторного агрегата
Известен также способ автоматического слежения, в котором при формировании регулирующего воздействия наряду с основным сигналом ошибки вводится его интеграл (обработка сигнала) и устройство для автоматического вождения самоходной сельскохозяйственной машиной, содержащее гидромеханическую следящую систему с копирующими щупами, соединенными с основным и дополнительным гидрораспределителями, а также автоматического и ручного управления.
Использование данных способа и устройства позволяет снизить установившуюся ошибку, однако основным недостатком является варьирование в данном случае в сторону ухудшения точности автоматического слежения при изменении поступательной скорости машины. Это связано с тем, что параметры объекта управления (машины), входящего в систему автоматического слежения, зависят от поступательной скорости. Поэтому использование известных способов и устройств для автоматического вожде- ния не позволяет получить высокого качества копирования заданной траектории в реальных условиях работы машины, так
Х| -N 00
ON
00
го
как ее поступательная скорость меняется в широких пределах. Кроме того, в известном устройстве при остановке машины наличие сигнала ошибки приводит к повороту управляемых колес до упора в одно из крайних положений, что нарушает нормальное функционирование устройства и потребует вмешательства оператора (водителя).
Цель изобретения - повышение точности автоматического вождения при измене- нии скорости машины.
Цель достигается тем, что в способе автоматического вождения самоходной маши- ны, заключающемся в формировании сигнала ошибки автовождения, сравнении его с заданным и формировании, по разности указанных сигналов, регулирующего воздействия для направления движения самоходной машины в сторону уменьшения рассогласования, регистрируют величину ее скорости, а регулирующее воздействие для направления движения самоходной машины в сторону уменьшения рассогласования формируют в зависимости от величины изменения скорости. Для этого устройство для автоматического вождения самоходной машины, содержащее гидромеханическую следящую систему с копирующими щупами, соединенными с основным и дополнительным гидрораспределителями, гидроцилин- драми автоматического вождения и ручного управления снабжено дополнительным гидронасосом, выход которого соединен с напорной магистралью дополнительного гидраспределителя, а вал дополнительного гидронасоса кинематически связан с ходовым колесом.
Формирование регулирующего воздействия s зависимости от величины скорости машины, в частности линейная зависимость скорости выдвижения штока гидроцилиндра ручного управления от скорости машины, осуществляемая дополнительным насосом, позволяет повысить точность автоматического вождения машины, работающей в ши- роком диапазоне изменения ее скорости.
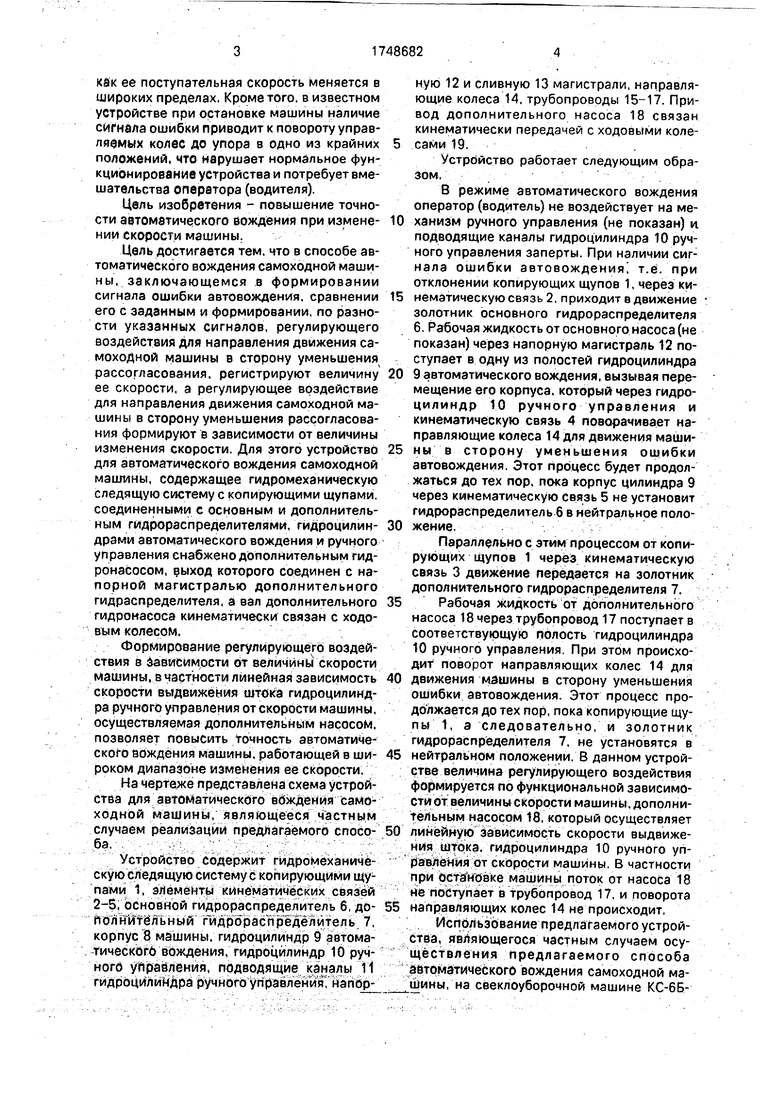
На чертеже представлена схема устройства для автоматического вождения самоходной машины, являющееся частным случаем реализации предлагаемого спосо- ба.
Устройство содержит гидромеханическую следящую систему с копирующими щупами 1, элементы кинематических связей 2-5, основной гидрораспределитель 6, до- (юлн тёльный гидрораспрёдёлитель 7, корпус 8 машины, гидроцилиндр 9 автома- тическогб вождения, гидроцилиндр 10 ручного управления, подводящие каналы 11 гидроцилиядра ручного управлений, напорную 12 и сливную 13 магистрали, направляющие колеса 14, трубопроводы 15-17. Привод дополнительного насоса 18 связан кинематически передачей с ходовыми колесами 19.
Устройство работает следующим образом.
В режиме автоматического вождения оператор (водитель) не воздействует на механизм ручного управления (не показан) и подводящие каналы гидроцилиндра 10 ручного управления заперты. При наличии сигнала ошибки автовождения т.е. при отклонении копирующих щупов 1, через кинематическую связь 2, приходит в движение золотник основного гидрораспределителя 6. Рабочая жидкость от основного насоса (не показан) через напорную магистраль 12 поступает в одну из полостей гидроцилиндра
9автоматического вождения, вызывая перемещение его корпуса, который через гидроцилиндр 10 ручного управления и кинематическую связь 4 поворачивает направляющие колеса 14 для движения машины в сторону уменьшения ошибки автовождения. Этот процесс будет продолжаться до тех пор. пока корпус цилиндра 9 через кинематическую связь 5 не установит гидрораспределитель 6 в нейтральное положение.
Параллельно с этим процессом от копирующих щупов 1 через кинематическую связь 3 движение передается на золотник дополнительного гидрораспределителя 7.
Рабочая жидкость от дополнительного насоса 18 через трубопровод 17 поступает в соответствующую полость гидроцилиндра
10ручного управления При этом происходит поворот направляющих колес 14 для движения машины в сторону уменьшения ошибки автовождения. Этот процесс продолжается до тех пор, пока копирующие щупы 1, а следовательно, и золотник гидрораспределителя 7, не установятся в нейтральном положении. В данном устройстве величина регулирующего воздействия формируется по функциональной зависимости от величины скорости машины, дополнительным насосом 18, который осуществляет линейную зависимость скорости выдвижения штока, гидроцилиндра 10 ручного управления от скорости машины. В частности при остановке машины поток от насоса 18 не поступает в трубопровод 17, и поворота направляющих колес 14 не происходит,
Использование предлагаемого устройства, являющегося частным случаем осуществления предлагаемого способа автоматического вождения самоходной машины, на свеклоуборочной машине КС-6Б01, по зволит повысить точность наведения уборочных органов машины на рядок Формула изобретения 1 .Способ автоматического вождения самоходной машины, заключающийся в формировании сигнала ошибки автовождения, сравнении его с заданным и формировании по разности указанных сигналов регулирующего воздействия для направления движения самоходной машины е сторону уменьшения рассогласования, отличающийся тем, что, с целью повышения точности автоматического вождения при изменении скорости самоходной машины, регистрируют величину ее. скорости, а регулирующее воздействие для направления движения самоходной машины в сторону уменьшения рассогласования
0
формируют в зависимости от величины измеренной скорости.
2 Устройство для автоматического вождения самоходной машины, содержащее гидромеханическую следящую систему с копирующими щупами, соединенными с основным и дополнительным гидрораспределителями, гидроцилиндрами автоматического вождения и ручного управления, отличающееся тем, что, с целью повышения точности автоматического вождения при изменении скорости машины, оно снабжено дополнительным гидронасосом, выход которого соединен с напорной магистралью дополнительного гидрораспределителя, а вал дополнительного гидронасоса кинематически связан с ходовым колесом.

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для автоматического вождения самоходной сельскохозяйственной машины | 1981 |
|
SU952122A1 |
| Устройство для автоматического вождения самоходной сельскохозяйственной машины | 1982 |
|
SU1017179A1 |
| Сельскохозяйственный агрегат | 1982 |
|
SU1085536A1 |
| Копирующее устройство для автоматического вождения сельскохозяйственной машины по борозде | 1980 |
|
SU882440A1 |
| ГИДРОМЕХАНИЧЕСКОЕ СЛЕДЯЩЕЕ УСТРОЙСТВО СЕЛЬСКОХОЗЯЙСТВЕННОЙ МАШИНЫ | 2007 |
|
RU2372216C2 |
| Устройство для управления самоходной уборочной машиной | 1979 |
|
SU879060A1 |
| Гидромеханическая система для автоматического и ручного управления самоходной сельскохозяйственной машиной по контрастному следу | 1984 |
|
SU1166689A1 |
| Устройство для автоматического вождения машинно-тракторного агрегата | 1982 |
|
SU1085537A1 |
| Устройство управления самоходной сельскохозяйственной машиной | 1985 |
|
SU1287763A1 |
| Самоходная корнеклубнеуборочная машина | 1982 |
|
SU1090276A1 |
Использование: сельскохозяйственное машиностроение, в частности в средствах для автоматического вождения самоходных машин. Сущность изобретения: величина регулирующего воздействия формируется по функциональной зависимости от поступательной скорости машины, например по линейной зависимости. Для этого в устройство введен дополнительный гидронасос, выход которого соединен с напорной магистралью дополнительного гидрорваспреде- лителя, а вал дополнительного-гидронасоса кинематически связан с ходовым колесом. 2 с п ф-лы, 1 ил
/4
| Устройство для автоматического вождения самоходной сельскохозяйственной машины | 1982 |
|
SU1017179A1 |
| кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
