Изобретение относится к области осуществления контроля за выполнением операций работы драглайна.
Известен способ учета правильности выполнения рабочего цикла экскавации, при котором контроль осуществляют мгновенным превышением тока якоря привода подъема и тяги порогового уровня, а также определением нахождения ковша в зоне разгрузки.
Недостатком известного способа является то, что сигналы контроля на выходе датчиков превышения порогового уровня токами якорей напора и подъема могут появиться в любой момент цикла экскавации независимо от выполняемой машинистом операции и наполнения ковша, а это ведет к ложному счету ковшей.
Целью изобретения является повышение точности учета. Для этого осуществляют контроль за достижением длинами канатов подъема и тяги значений, соответствующих их величинам на линии разгрузки ковша.
На фиг. 1 показаны схемы, иллюстрирующие предлагаемый способ; на фиг. 2 - структурная схема устройства для осуществления способа.
привода тяги, что исключает ложную фиксацию процесса после разгрузки (при реверсировании привода тяги). Контроль поворота платформы осуществляется фиксацией величины угла, на который платформа поворачивается после заверщения процесса копания до момента разгрузки ковша.
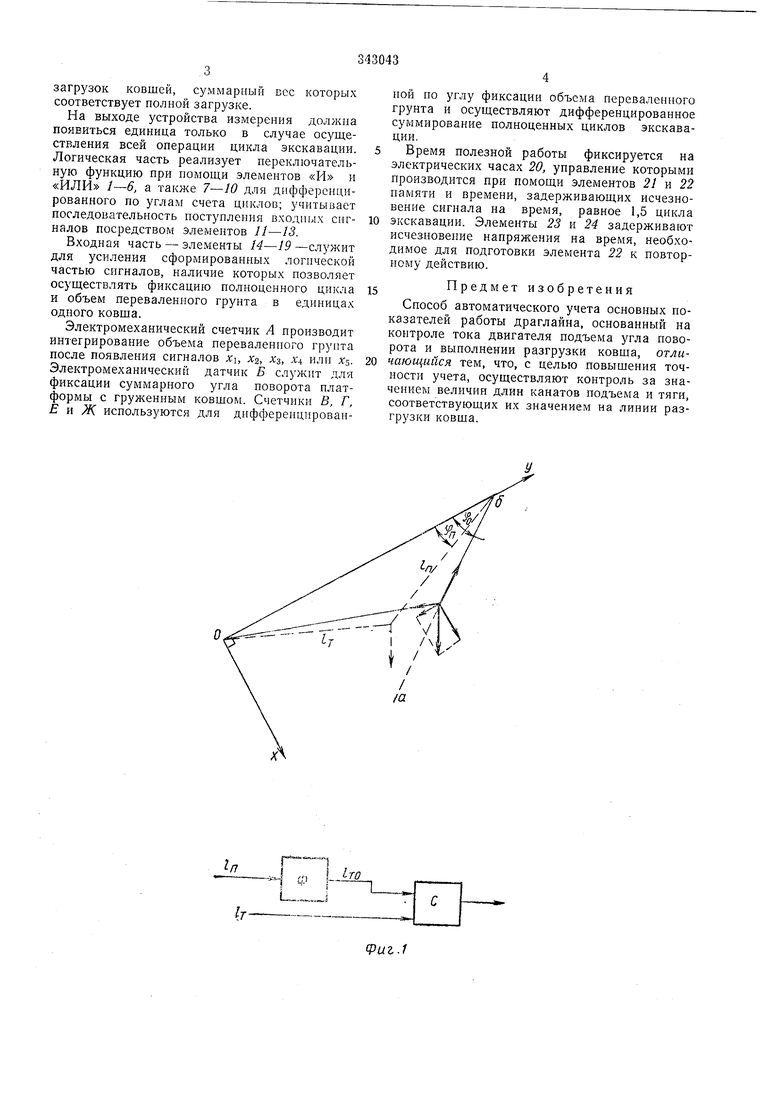
Разгрузка ковша происходит самопроизвольно при пересечении им линии разгрузки
а-б. Поэтому разгрузка может контролироваться путем фиксации момента достижения углом фп стрелой и подъемными канатами значения, равного углу разгрузки фо (углу между стрелой и линией разгрузки).
Для осуществления контроля разгрузки на входе элемента сравнения С сравниваются текущие значения /т со значением эталона, равного значению /то - длины тяговых канатов при положении ковша на линии разгрузки, которое соответствует длине каната подъема /п- Величина /то вырабатывается на выходе функционального блока Ф.
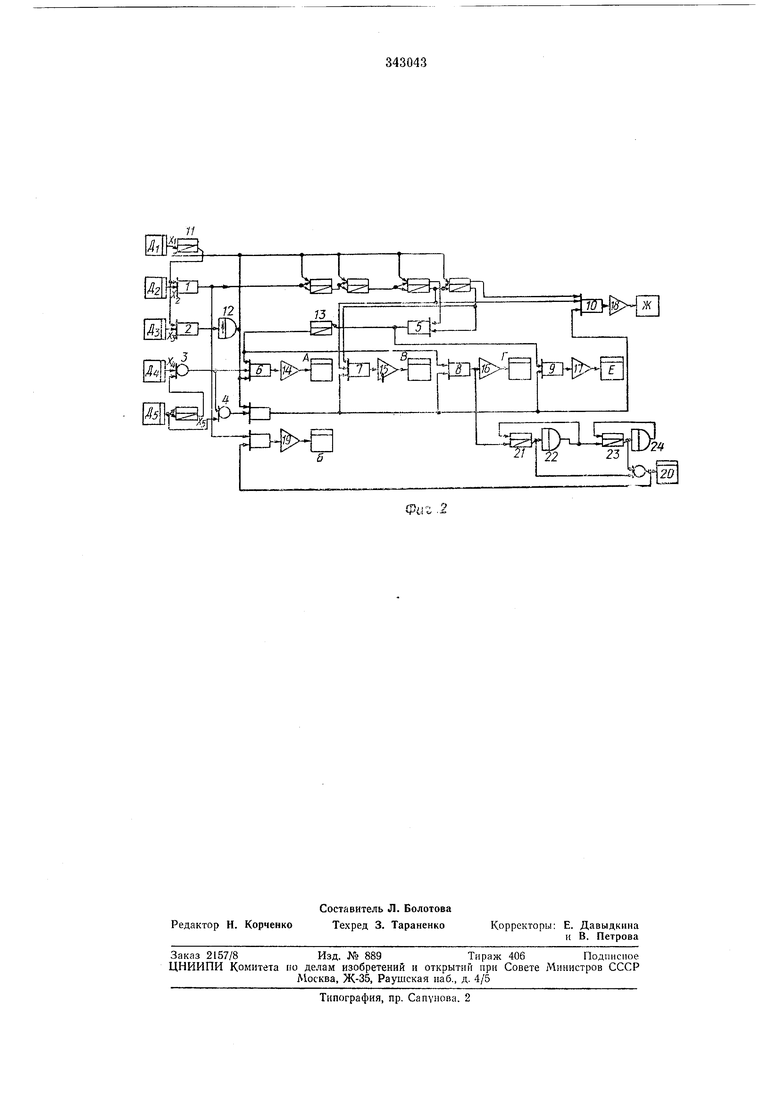
Для осушествления описываемого способа применяют устройство, входная часть которого вырабатывает следующие входные сигналы при помощи блоков Xi контроля процесса копания; Х2 контроля процесса поворота из забоя в отвал; лз контроля процесса разгрузки; Х4 фиксации полной загрузки ковзагрузок ковшей, суммарный вес которых соответствует полной загрузке.
На выходе устройства измерения должна появиться единица только в случае осуществления всей операции цикла экскавации. Логическая часть реализует переключательную функцию при помощи элементов «И и «ИЛИ /-6, а также 7-10 для дифференцированного по углам счета циклов; учитывает последовательность поступления входных сигналов посредством элементов Л-13.
Входная часть - элементы 14-19-служит для усиления сформированных логической частью сигналов, наличие которых позволяет осуществлять фиксацию полноценного цикла и объем переваленного грунта в единицах одного ковща.
Электромеханический счетчик А производит интегрирование объема переваленного грунта после появления сигналов Xi, х, Хз, Х4 или xs. Электромеханический датчик Б служит для фиксации суммарного угла поворота платформы с груженным ковщом. Счетчики В, Г, Е и Ж используются для диффереицированной по углу фиксации объема переваленного грунта и осуществляют дифференцированное суммирование полноценных циклов экскавации.
Время полезной работы фиксируется на электрических часах 20, управление которыми производится при помощи элементов 21 и 22 памяти и времени, задерживающих исчезновение сигнала на время, равное 1,5 цикла экскавации. Элементы 23 и 24 задерживают исчезновение напряжения на время, необходимое для подготовки элемента 22 к повторному действию.
Предмет изобретения
Способ автоматического учета основных показателей работы драглайна, основанный на контроле тока двигателя подъема угла поворота и выполнении разгрузки ковща, отличающийся тем, что, с целью повыщения точности учета, осуществляют контроль за значением величин длин канатов подъема и тяги, соответствующих их значением на линии разгрузки ковща.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для учета и контроля работы экскаватора | 1979 |
|
SU872668A1 |
| Способ управления разгрузкой ковша экскаватора-драглайна | 1985 |
|
SU1263761A2 |
| Способ оперативного контроля использования экскаватора-драглайна | 1986 |
|
SU1328451A1 |
| Способ автоматического учета основных показателей работы драглайна | 1983 |
|
SU1170058A1 |
| Устройство для измерения загрузки ковша экскаватора | 1983 |
|
SU1145099A1 |
| УСТРОЙСТВО для КОНТРОЛЯ РАБОТЫ ЭКСКАВАТОРА | 1972 |
|
SU327306A1 |
| Способ оценки качества управления экскаватором-драглайном | 1985 |
|
SU1344868A1 |
| Устройство для измерения работы экскаватора драглайна | 1976 |
|
SU737575A2 |
| Способ управления разгрузкой ковша экскаватора-драглайна | 1987 |
|
SU1502723A1 |
| Способ оперативного измерения производительности экскаватора-драглайна | 1983 |
|
SU1084393A1 |