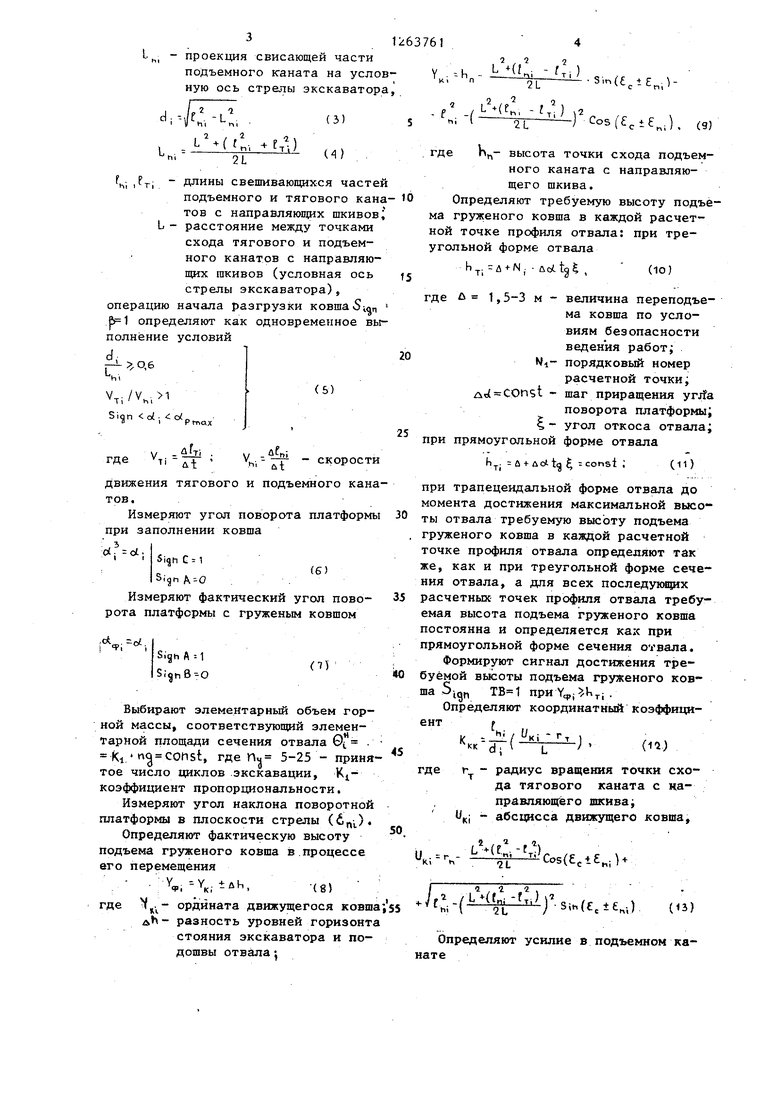
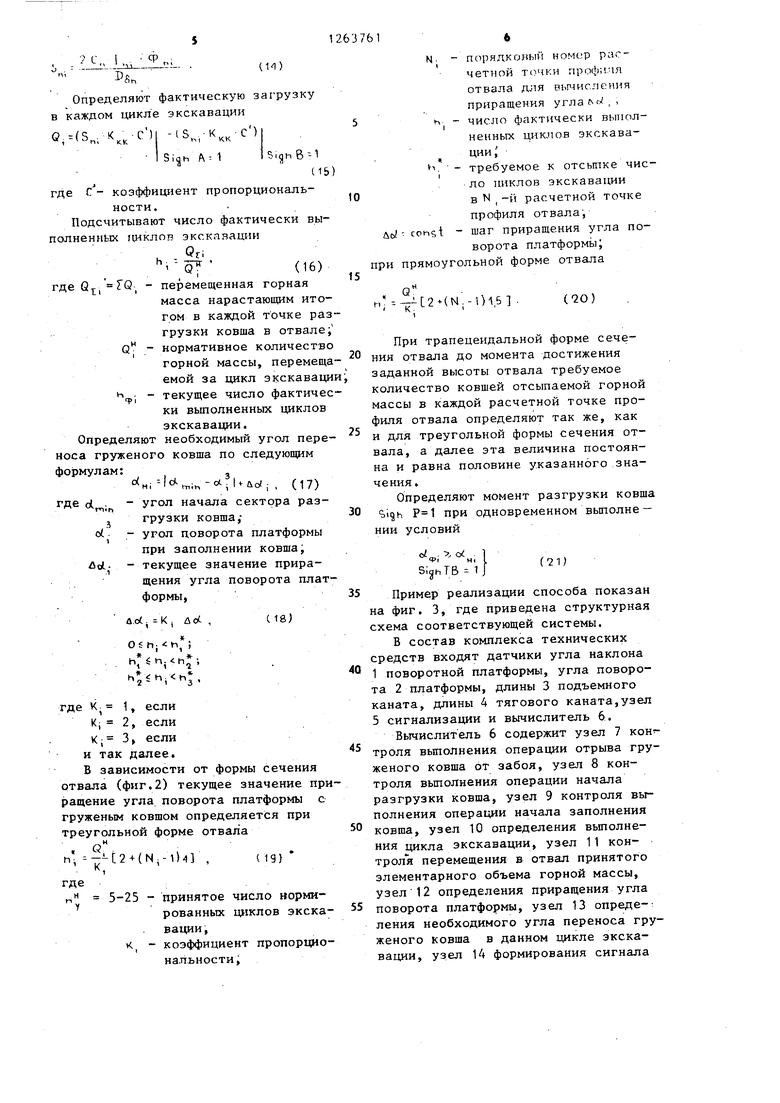
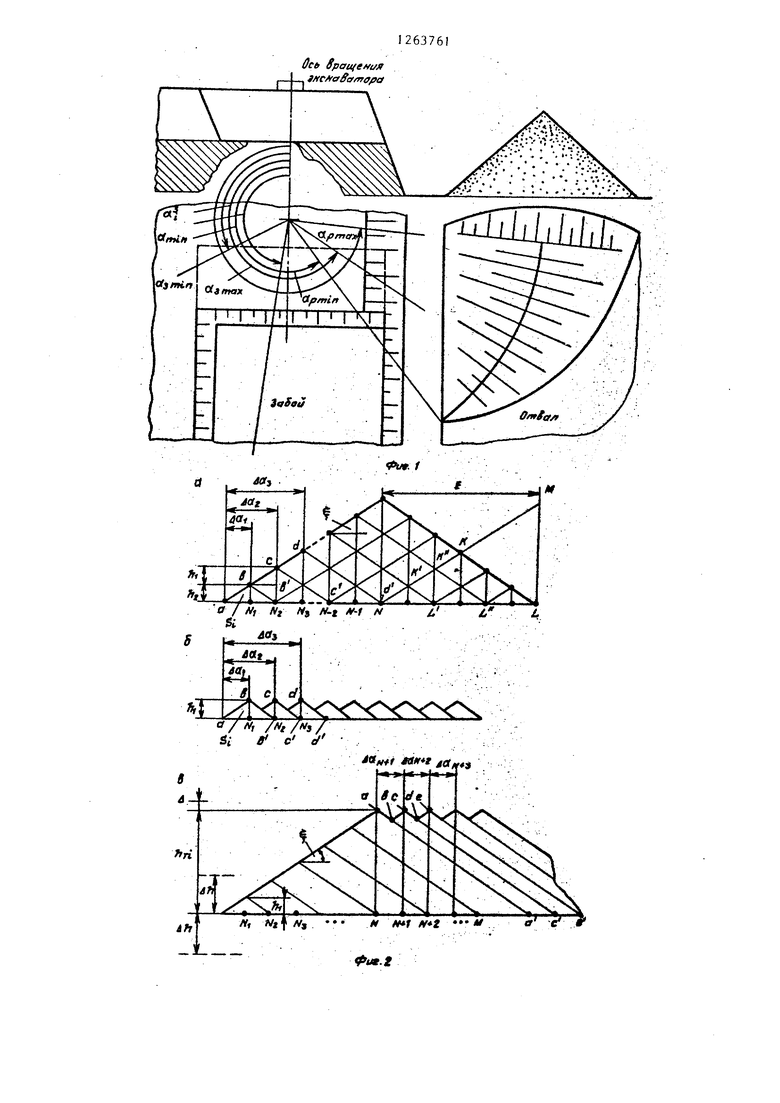
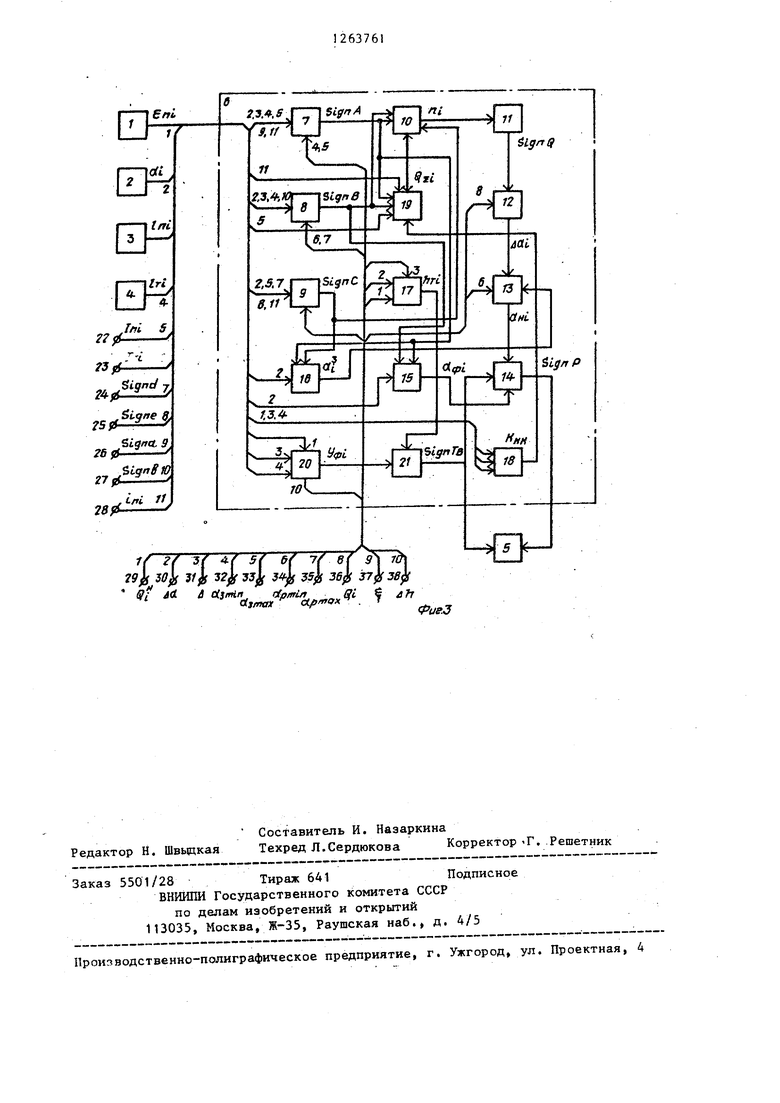
Изобретение относится к измерению параметров выполненной работы и управлению экскаватором-драглайном при.ведении открытых горных работ и является дополнительным к основно му по авт.св. № 1199868. Целью изобретения является увели чение эксплуатационной производител ности экскаватора-драглайна за счет более точного формирования команды на разгрузку ковша в отвале и повышение безопасности работ. На фиг. 1 .показаны угловые параметры поворота платформы экскаватор при переносе груженого ковша; на фиг. 2 - схемы формирования отвалов на фиг. 3 - структурная схема систв мы, реализующей способ контроля работы экскаватора-драглайна. Предлагаемый способ включает еле кующее основные операции: Измеряют ток якорной цепи двигателя механизма подъема I . Измеряют ток .якорной цепи двигат ля механизма тяги Ц,. Измеряют ток цепи возбуждения двигателя механизма подъема ; . Измеряют длины свешивающихся час тей тягового fri и подъемного{ тон с направляющих шкивов. Определяют состояние главных при водов экскаватора: вращение двигателя механизма тяги в направлении, обеспечивающем наматывание каната на барабан ( 1), увеличение якорного тока двигателя механизма тяги ( 1); вращение двигателя механизма тяги в направлении, обеспечивающем сматывание каната с бара бана (Sigh а 1), уменьшение якорног тока двигателя механизма тяги ( 1). . Устанавливают углы начала и окон чания секторов заполнения (ot ,ax ) и разгрузки (. , с/ ковша. Принимают за фактическое выполнение цикла экскавации последовательное выполнение начала операции 50 заполнения ковша, отрыва груженого ковша от забоя, начала разгрузки ковша в текущем цикле экскавации и начала операции заполнения ковша в последующем цикле экскавации,при 55 этом операцию начала заполнения ковша51|л с 1 определяют как одновре-, менное выполнение условий усилие в подъемном канате-, средний ток якорной цепи двигателя механизма подъема; средний магнитный поток двигателя механизма подъема, средний ток возбуждения двигателя механизма подъемаi магнитный поток нас1лцения двигателя механизма подъема j постоянная характеристики намагничивания двигателя механизма подъема; ток возбуждения двигателя механизма подъема диаметр барабана подъемной лебедки, интервал интегрирования;масса порожнего ковша; угол поворота платформы. еного ковша от ляют как одноусловий а -1 SH. d: оС. о(. где of; - кратчайшее расстояние между центром тяжести движущего ковша и условной осью стре-. лы экскаватора; 31263761 I , - проекция свисающей части подъемного кганата на условную ось стрелы экскаватора J:K,-C, . 3 .„. (lklli) „, , - ДЛИНЫ свешивающихся частей подъемного и тягового кана- О тов с направляюищх шкивов; L- расстояние между точками схода тягового и подъемного канатов с направляющих шкивов (условная ось t5 стрелы экскаватора), операцию начала разгрузки ковша определяют как одновременное выполнение условий ,6 VTi/V.,1 Sign о(-, о V , . V.--1 - скорости Ti-u-t движения тягового и подъемного канатов. Измеряют угол поворота платформы 30 ы
при заполнении ковша i
(б)
Измеряют фактический угол поворота платформы с груженым ковшом
Sigh А 1
П)
Выбирают элементарный объем горной массы, соответствующий элементарной площади сечения отвала 0с , где Пи 5-25 - принятое число циклов экскавации, К коэффициент пропорциональности.
Измеряют угол наклона поворотной платформы в плоскости стрелы (6nl)
Определяют фактическую высоту подъема груженого ковша в процессе его перемещения
V-YK,. tAh,
(8)
где v ордината движущегося ковшаjss дН - разность уровней горизонта стояния экскаватора и подошвы отвала , у.,к„ f ма но уг где при при мом
груженого ковша в каждой расчетной точке профиля отвала определяют так же, как и при треугольной форме сечения отвала, а для всех последукяцих
расчетных точек профиля отвала требуемая высота подъема груженого ковша постоянна и определяется как при прямоугольной форме сечения отвала. Формируют сигнал достижения требуёмой высоты подъема груженого
приУф; Лт; .
ша
Определяют координатный коэффициент
fH.
и.
- г
j
(1)
кк
di
г - радиус вращения точки схогдеда тягового каната с направляющего шкива; - абсцисса движущего ковша.
.(e, .,).
I i 2 2
Jf -/i ifflijinli.
%;и(,4.,) (13)
hi 2L
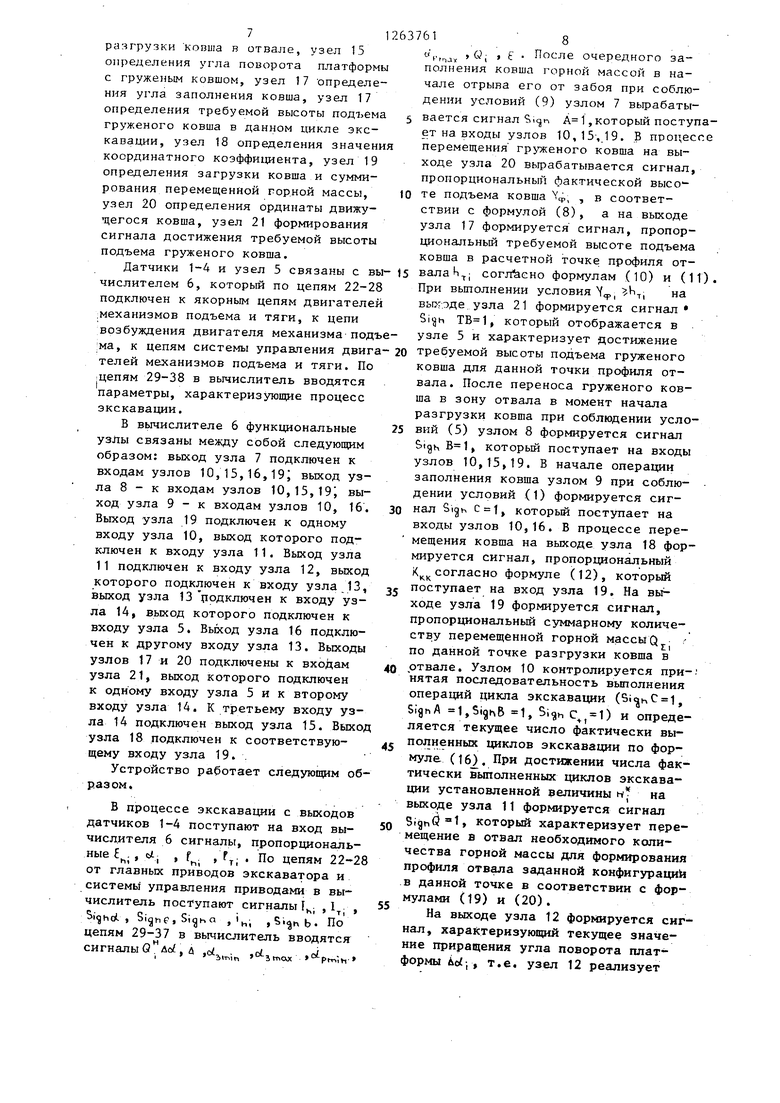
Определяют усилие в подъемном канате2,2 2 |. 3.(,Е„,1/ L(e,, -г, ) ,2 (2Г-) co5(f,. Ь„- высота точки схода подъемного каната с направляющего шкива. пределяют требуемую высоту подъеруженого ковша в каждой расчетточке профиля отвала: при треьной форме отвала Ь. uo(.tg , (10) л 1,5-3 м - величина переподъема ковша по условиям безопасности ведения работ; NI- порядковый номер расчетной точки; A( COnst - шаг приращения yrjfa поворота платформы; 4 угол откоса отвала; рямоугольной форме отвала ь. u + uottg :const; (11) рапецеидальной форме отвала до та достижения максимальной высовала требуемую высоту подъема Определяют фактическую загрузку в каждом цикле экскавации XKK-C) Q-(S. к.i(jhB-Siqh А - 1 где С - коэффициент пропорциональности. Подсчитывают число фактически в полненных циклов экскавации , . Сп ;оу (16 где Q.-,, перемещенная горная масса нарастающим ит гом в каждой точке р грузки ковша в отвал нормативное количест горной массы, переме емой за цикл экскава ф-| - текущее число фактич ки выполненных цикло экскавации. Определяют необходимый угол пер носа груженого ковша по следующим формулам: -|c „i„ , (17) -угол начала сектора раз грузки ковша,-угол доворота платформы при заполнении ковща -текущее значение приращения угла поворота пла формы, Л.о( . К , Д oC OS h; , где k 1, если К; 2, если К i 3, если и так далее. В зависимости от формы сечения отвала (фиг.2) текущее значение пр ращение угла, поворота платформы с груженым ковшом определяется при треугольной форме отвала h -----t24N,-l)4l , где. н 5-25 - принятое число нормированных Щ1КЛОВ экска нации, к - коэффициент пропорцио нальности. N. - порядконый номер расчетной точки проф-.шя отвала для вычисления приращения . , , ь, - число фактически выполненных циклов экскавац ции; vv - требуемое к отсыпке число циклов экскавации в N -и расчетной точке профиля отвала, const - шаг приращения угла поворота платформыi при прямоугольной форме отвала .-1)15 1 При трапецеидальной форме сечения отвала до момента достижения заданной высоты отвала требуемое количество ковшей отсыпаемой горной массы Б каждой расчетной точке профиля отвала определяют так же, как и для треугольной формы сечения отвала, а далее эта величина постоянна и равна половине указанного значения. Определяют момент разгрузки ковща при одновременном вьшолне - НИИ условий I. , (Х . 1 PlMl I iahTB 1 J Пример реализации способа показан а фиг. 3, где приведена структурная хема соответствующей системы. В состав комплекса технических редств входят датчики угла наклона поворотной платформы, угла повороа 2 платформы, длины 3 подъемного аната, длины 4 тягового каната,узел сигнализации и вычислитель 6. Вычислитель 6 содержит узел 7 кон роля выполнения операции отрыва груеного ковша от забоя, узел 8 конроля выполнения операции начала азгрузки ковша, узел 9 контроля выолнения операции начала заполнения овша, узел 10 определения выполнеия цикла экскавации, узел 11 конроля перемещения в отвал принятого лементарного объема горной массы, зел 12 определения приращения угла оворота платформы, узел 13 опреде-ения необходимого угла переноса груеного ковша в данном цикле экскаации, узел 14 формирования сигнала 712 разгрузки копша в отвале, узел 15 определения угла поворота платформы с груженым ковшом, узел 17 определения угла заполнения ковша, узел 17 определения требуемой высоты подъема груженого ковша в данном цикле экскавации, узел 18 определения значения координатного коэффи1щента, узел 19 определения загрузки ковша и суммирования перемещенной горной массы, узел 20 определения ординаты движущегося ковша, узел 21 формирования сигнала достижения требуемой высоты подъема груженого ковша. Датчики 1-4 и узел 5 связаны с вычислителем 6, который по цепям 22-28 подключен к якорным цепям двигателей :механизмов подъема и тяги, к цепи возбуждения двигателя механизма подъе :ма, к цепям системы управления двигателей механизмов подъема и тяги. По цепям 29-38 в вычислитель вводятся параметры, характеризующие процесс экскавации. В вычислителе 6 функциональные узлы связаны между собой следующим образом: выход узла 7 подключен к входам узлов 10,15,16,19 выход узла 8 - к входам узлов 10,15,19J выход узла 9 - к входам узлов 10, 16. Выход узла 19 подключен к одному входу узла 10, выход которого подключен к входу узла 11. Выход узла 11 подключен к входу узла 12, выход которого подключен к входу , выход узла 13 подключен к входу узла 14, выход которого подключен к входу узла 5. Вькод узла 16 подключен к другому входу узла 13. Вькоды узлов 17 и 20 подключены к входам узла 21, выход которого подключен к одному входу узла 5 и к второму входу узла 14. К третьему входу узла 14 подключен выход узла 15. Выхо узла 18 подключен к соответствующему входу узла 19. . Устройство работает следующим об разом, В процессе экскавации с выходов датчиков 1-4 поступают на вход вычисдителя 6 сигналы, пропорциональные . , Ы; , f. , Г. . По цепям 22-2 от главных приводов экскаватора и системы управления приводами в вычислитель поступают сигналы т , Signe,Sigbo , I,,; , По цепям 29-37 в вычислитель вводятся сигналы Q . До, л ,dL . , и 61 oj, ,Qj , f . После очередного заполнения ковша горной массой в начале отрыва его от забоя при соблюдении условий (9) узлом 7 вырабатывается сигнал S,n ,который поступает на входы узлов 10,15,19. В процессе перемещения гр женого ковша на выходе узла 20 вырабатывается сигнал, пропорциональный фактической высоте подъема ковша ф, , в соответствии с формулой (8), а на выходе узла 17 формируется сигнал, пропорциональный требуемой высоте подъема ковша в расчетной точке профиля отвалаК- согласно формулам (10) и (11). При выполнении условия Ч, Ь, на вьигэде узла 21 формируется сигнал , который отображается в узле 5 и характеризует достижение требуемой высоты подъема груженого ковша для данной точки профиля отвала. После переноса груженого ковша в зону отвала в момент начала разгрузки ковша при соблюдении услоВИЙ (5) узлом 8 формируется сигнал Sigh который поступает на входы узлов 10,15,19. В начале операции заполнения ковша узлом 9 при соблюдении условий (1) формируется сигнал с 1, который поступает на входы узлов 10,16. Б процессе перемещения ковша на выходе узла 18 формируется сигнал, пропорциональный К согласно формуле (12), который поступает на вход узла 19. На вы ходе узла 19 формируется сигнал, пропорциональный суммарному количеству перемещенной горной массыQ по данной точке разгрузки ковша в отвале. Узлом 10 контролируется принятая последовательность вьтолнения операций цикла экскавации ( i, SighA 1, 1, 5igb C, 1) и определяется текущее число фактически выполненных циклов экскавации по формуле (16. При достижении числа фактически выполненных циклов экскавации установленной величины N на выходе узла 11 формируется сигнал , который характеризует перемещение в отвал необходимого количества горной массы для формирования профиля отвала заданной конфигураций В данной точке в соответствии с формулами (19) и (20). На выходе узла 12 формируется сигнал, характеризующий текущее значение приращения угла поворота платформы Ы; т.е. узел 12 реализует
зависимость (18). Узел 16 формирует сигнал, пропорциональный углу заполнения ковшаЫ- , путем реализации , функции (6).
Узел 13, обрабатывая сигналы, поступающие с выходов блоков 12, 16, и с учетом величин oi,,- определяет необходимый угол переноса груженого ковша в данном цикле экскавации ot,,, , т.е. реализует зависимость (17). Узел 15 формирует сигнал, пропорциональньй фактически выполненному углу поворота платформы с груженым . ковшом о(; путем реализации функции (7).
На узла 14 формируется сигнал-команда на разгрузку ковша в отвале Stgt, р 1, если и SlqhTB 1. С выхода узла 14 сигнал SignP 1 поступает на вход узла сиг нализации 5. Руководствуясь этим сигналом, машинист экскаватора приступает к выполнению операции разгрузки ковша.
Формула изобретения
1. Способ управления разгрузкой ковша экскаватора-драглайна по авт« св. № 1199868, о т л ич а ю щ и и с я тем, что, с целью увеличения эксшСуатационкой производительности экскаватора-драглайна за счет более точного формирования команды на pasгрузку ковша в отвале и повышения безопасности работ, измеряют угол наклона поворотной платформы в плоскости стрелы, задают уровни горизонта стояния и подошвы отвала, фактическук. высоту подъема груженого ковша в процессе его перемещения определяют по Формуле
i.,
где „; - ордината дйижущегося ковша flh - разность уровней горизонта стояния экскаватора-драглайна и подошвы отвала, определяют требуемую высоту подъема груженого ковша в- каждой расЧетной точке при треугольной форме профиля отвапа по формуле
b.-u + N-ucji.
5,
т I
где Л 1,5-3 м - величина переподъема ковша по условиям безопасности ведения работ; N-, - порядковый номер расчетной точкиj
doi const - шаг приращения угла поворота платформы; , - расчетный угол образующей отвала;
определяют фактическую загрузку Q; ковша в каждом цикле экскавации по формуле
-(5„
.--(S.
KKK-C)
Чи-с
S,,nB 1
Sign А - 1
где S,i - усилие, в подъемном канате;К - координатный коэффициКК
ент,
С - коэффициент пропорциональности, SiohA 1 - сигнал отрьгаа груженог
ковша от забоя
. 1 - сигнал разгрузки ковша а команду на разгрузку ковша формируют при условии равенства фактической и требуемой высот подъема груженого ковша и с учетом фактической загрузки ковша горной массой в каждом цикле экскавации.
2.Способ по п. 1, отличающий с я тем, что требуемую высоту подъема груженого ковша в каждой расчетной точке при прямоугольной форме профиля отвала определяют
по формуле
h, u-t-uot-tg -cohst .
3.Способ ПОП.1, отличающийся тем, что требуемую высоту подъема Ь груженого ковша в каждо расчетной точке при трапецеидальной форме профиля отвала определяют до момента доститкения максимальной вы соты по формуле
h.; - floltg
а для всех последующих расчетных точек cobst.
Ось Spaufef i/jr iffc effamffpa
a / NI Nt My ff-t ff-1 N
лаз
/v, //У,/л S,- B c d
6ni
И
&iyne
fSffSigrrAff
26 y
.iynffo
27 ff.
Lfli 11
28ffТ { f ( Т { Л
9jjf 0 J/ Щ 3)s Щ
36 37X3B
(fi ЛЛ л Ofj/rrt/ rfofffiftSi Щ jfr
Лзтгх cLfl fx . Л
A/aJ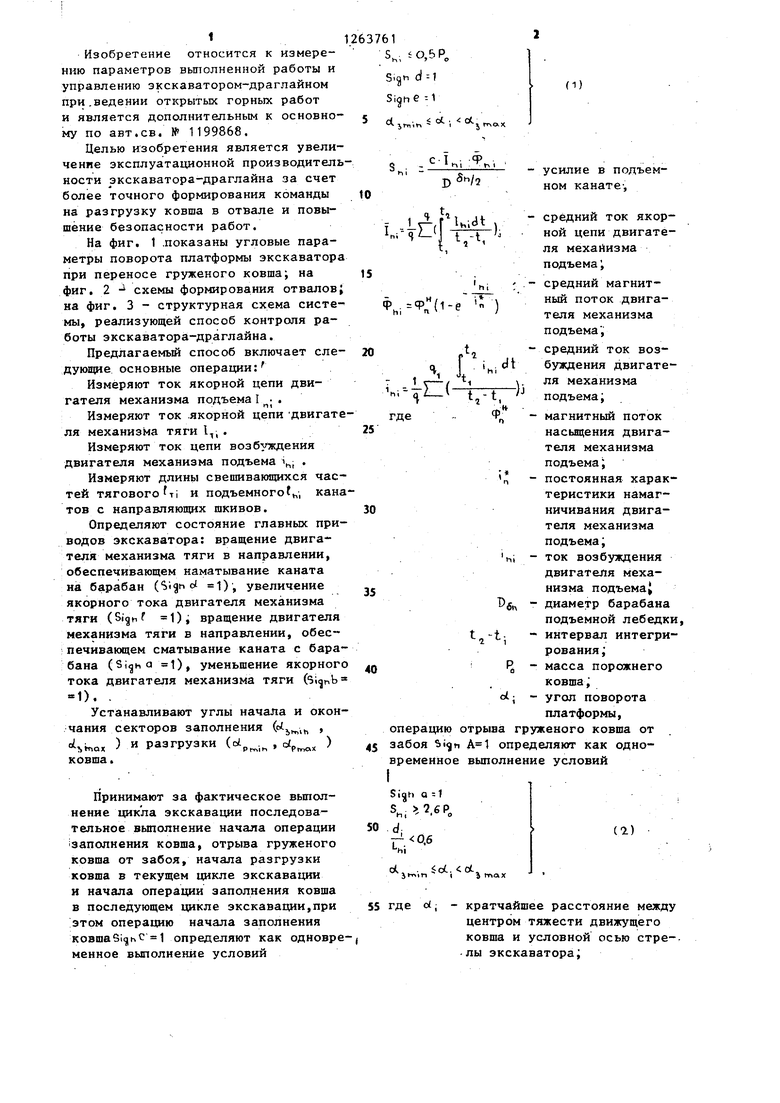
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ управления разгрузкой ковша экскаватора-драглайна | 1984 |
|
SU1199868A1 |
| Способ управления разгрузкой ковша экскаватора-драглайна | 1987 |
|
SU1502723A1 |
| Способ оперативного измерения производительности экскаватора-драглайна | 1987 |
|
SU1585462A1 |
| Способ оперативного измерения производительности экскаватора-драглайна | 1983 |
|
SU1084393A1 |
| Способ оперативного контроля использования экскаватора-драглайна | 1986 |
|
SU1328451A1 |
| Способ контроля процесса заполнения ковша-экскаватора-драглайна | 1985 |
|
SU1298311A1 |
| Способ оценки качества управления экскаватором-драглайном | 1985 |
|
SU1344868A1 |
| Способ контроля работы экскаватора-драглайна | 1983 |
|
SU1129398A1 |
| Способ измерения количества работы выполненной экскаватором-драглайном | 1982 |
|
SU1097765A1 |
| Способ автоматического учета основных показателей работы драглайна | 1986 |
|
SU1421830A1 |
Изобретение относится к области контроля и учета работы экскаваторадраглайна и управления им по измеренным параметрам. Изобретение позволяет увеличить производительность экскаватора за счет более точного формирования команды на разгрузку ковша в отвале и повьш1ения безопасности ведения работ. В процессе работы экскаватора измеряют токи якорньк цепей двигателей механизмов подъема и тяги, ток цепи возбуждения двигателя механизма подъема и длины тягового и подъемного канатов. Затем определяют состояние главных приво- ; дов экскаватора. Устанавливают углы наклона и окончания секторов заполнения и разгрузки ковша. По изМеренным параметрам определяют операции начала заполнения ковша, отрыва груженого ковша от забоя, начала разгрузки ковша и начала заполнения ковша в следующем цикле. При этом измеряют углы поворота платформы при заполнении ковша и при переносе груженого ковша и выбирают элементарный объем горной массы. Определяют необходимый угол переноса груженого ковша и определяют момент разгрузки ковша. Дополнительно измеряют угол наклона пово о ротной платформы н задают уровни го(Л ризонта стояния и подошвы отвала. По формулам определяют фактическую высоту подъема груженого ковша в процессе его перемещения. Затем определяют требуемую высоту подъема груженого ковша в каждой расчетной точке проtsD филя отвала при различных его фор05 мах и фактическую загрузку ковша горСО ной массой в каждом цикле экскаваvj ции. Момент разгрузки ковша определяа ют из условия равенства фактической и требуемой высот подъема груженого ковша и с учетом фактической загрузкк, ковша горной массой в каждом цикле экскавации. Изобретение дополнительное к авт.св. № 1199868, 2 з,п, ф-лы, 3 ил. N
| Способ управления разгрузкой ковша экскаватора-драглайна | 1984 |
|
SU1199868A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
