Известен двухосный силовой гиростабилизатор, гироблок и ротор координатного преобразователя которого синхронно вращаются относительно платформы вокруг оси, коллинеарной осям процессии гироблоков. Благодаря вращению гироблоков уменьшается результирующий дрейф гиростабилизатора, так как дрейф из непрерывно нарастающего становится периодически меняющимся.
Недостатками известного гиростабилизатора являются ограниченная скорость автокомпенсации погрещностей, влияние вращения основания на систему разгрузки, зависимость величины приложенных к гироскопам моментов для их вращения от положения платформы, постоянная работа системы разгрузки, а следовательно, нагрев прибора.
Указанные недостатки являются следствием того, что гироскопы вращаются под действием моментов двигателей стабилизации.
Предложенное устройство отличается повышенной точностью благодаря тому, что гиростабилизатор снабжен л естко связанным с корпусами гироблоков маховичком, собственная ось вращения которого направлена по биссектрисе угла, составленного собственными осями вращений роторов гироскопов, а привод корпусов гироблоков, маховичка и ротора координатного преобразователя выполнен червячным.
Проекции вектора кинетического момента маховичка на оси роторов гироскопов равны векторам кинетических моментов гироскопов, но противоположно им направлены, а, следовательно, кинетический момент маховичка в 1,41 раза больще кинетического момента каждого гироскопа.
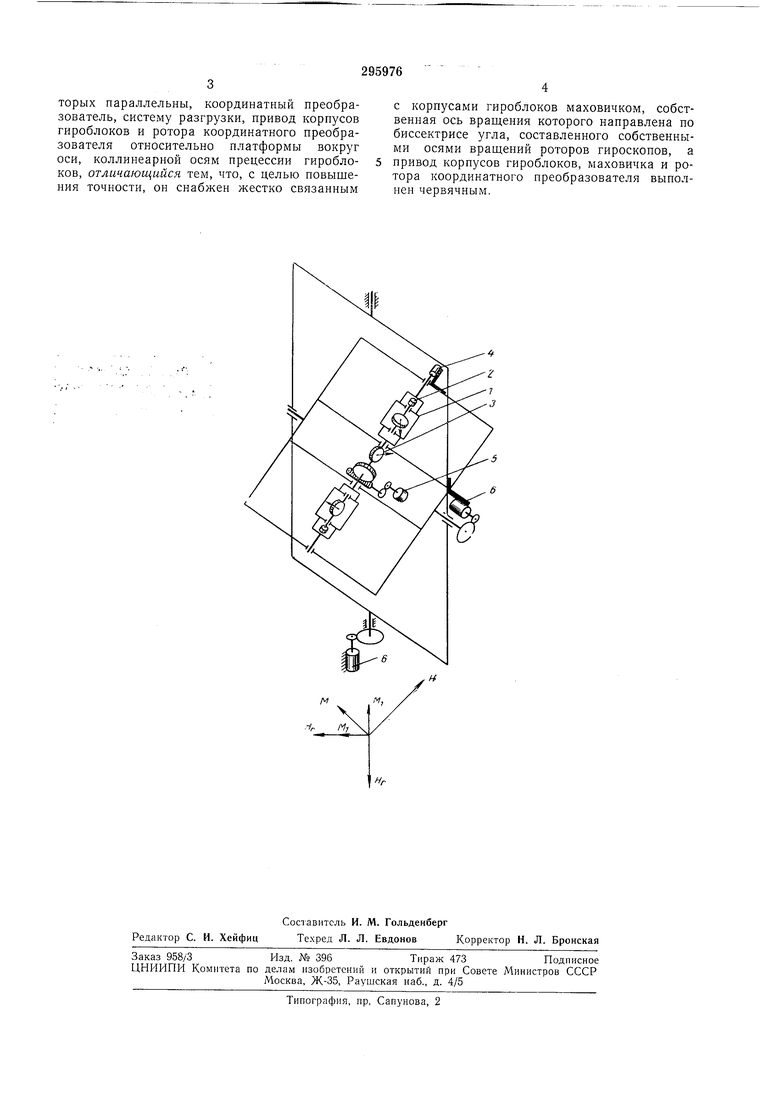
На чертеже показано описываемое устройство.
Корпуса гироблоков / с статорами 2 датчиков углов, маховичок 3 и ротор координатного преобразователя 4 приводятся во вращение с постоянной скоростью червячным приводом 5. Гироскопический момент маховичка, порожденный этим вращением вокруг оси прецессии, вызовет вращение гироскопов вокруг осей прецессий с той же угловой скоростью. Разгрузка платформы осуществляется двигателями 6 стабилизации по сигналам с преобразователя координат, предназначенного для распределения сигналов с датчиков углов между двигателями стабилизации в зависимости от пололсения гироблоков относительно
платформы.
торых параллельны, координатный преобразователь, систему разгрузки, привод корпусов гироблоков и ротора координатного преобразователя относительно платформы вокруг оси, коллинеарной осям прецессии гироблоков, отличающийся тем, что, с целью повышения точности, он снабжен жестко связанным
с корпусами гироблоков маховичком, собственная ось вращения которого направлена по биссектрисе угла, составленного собственными осями вращений роторов гироскопов, а привод корпусов гироблоков, маховичка и ротора координатного преобразователя выполнен червячным.
| название | год | авторы | номер документа |
|---|---|---|---|
| ОДНООСНЫЙ СИЛОВОЙ ГИРОСТАБИЛИЗАТОР | 2008 |
|
RU2382331C1 |
| Двухосный силовой гиростабилизатор | 1972 |
|
SU449240A1 |
| СПОСОБ АВТОКОМПЕНСАЦИИ ПОГРЕШНОСТЕЙ ИНЕРЦИАЛЬНОЙ СИСТЕМЫ УПРАВЛЕНИЯ | 1972 |
|
SU344269A1 |
| Способ калибровки гироблоков платформы трехосного гиростабилизатора | 2020 |
|
RU2757854C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ АЗИМУТА ПЛАТФОРМЫ ТРЕХОСНОГО ГИРОСТАБИЛИЗАТОРА ПО УГЛУ ПОВОРОТА КОРПУСА ГИРОБЛОКА | 2012 |
|
RU2513631C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ АЗИМУТА ПЛАТФОРМЫ ТРЕХОСНОГО ГИРОСТАБИЛИЗАТОРА | 2010 |
|
RU2428658C1 |
| Одноосный силовой горизонтальный гиростабилизатор | 2020 |
|
RU2748143C1 |
| Азимутальная ориентация платформы трехосного гиростабилизатора | 2018 |
|
RU2700720C1 |
| АЗИМУТАЛЬНАЯ ОРИЕНТАЦИЯ ПЛАТФОРМЫ ТРЕХОСНОГО ГИРОСТАБИЛИЗАТОРА ПО ПРИРАЩЕНИЯМ УГЛА ПРЕЦЕССИИ ГИРОБЛОКА | 2012 |
|
RU2509289C2 |
| Азимутальная ориентация платформы трехосного гиростабилизатора | 2016 |
|
RU2630526C1 |
