Изобретение относится к области экспериментальной гидродинамики.
При решении ряда технических задач необходимо знать значение гидродинамических сил и моментов, действующих на поле различной формы при формировании отрывного течения импульсного изменения скорости движения этих тел. При этом движение тела после импульсного изменения скорости может быть равномерным, ускоренным или замедленным.
Известны способы моделирования нестационарного движения модели в лабораторных условиях.
По одному из них гидродинамические коэффициенты оценивают только с помощью графической обработки фотографий линий тока, полученных при импульсивном возникновении движения испытуемого тела. При этом тело движется с очень малой скоростью (,0082 м1сек, Re 580). В этом способе испытуемое тело, установленное на буксировочной раме сравнительно небольшой массы, импульсивно приводится в движение включением сцепной муфты, соединяющей буксировочную раму через ходовой винт с электродвигателем. Время набора заданной скорости испытуемым телом определяется временем срабатывания сцепной муфты.
По другому способу гидродинамические силы, действующие на неподвижно установленное в вертикальной гидротрубе испытуемое тело, определяют ери набегании потока жидкости, ускоренно приведенного в движение быстрым открытием заслонки гидротрубы с последующей регулировкой площади выходного сечения гидротрубы для получения постоянной скорости потока.
Эти способы, однако, весьма ограничены в своих возможностях, так как позволяют получить только оценки сил при отдельных режимах , а главное, не могут обеспечить быстрого набора заданной скорости.
Предлагаемый способ позволяет экспериментально определять гидродинамические характеристики различных тел при импульсивном и ускоренном (замедленном) движении тел. Способ может быть распространен на
случай произвольного нестационарного движения тела.
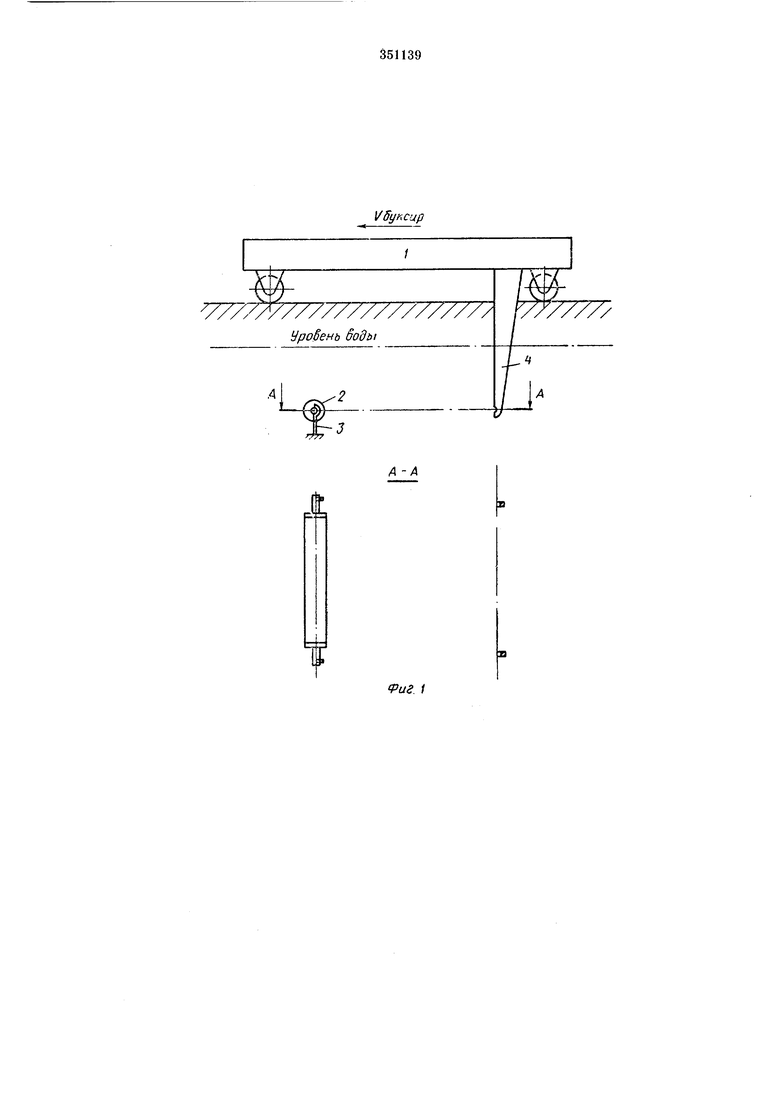
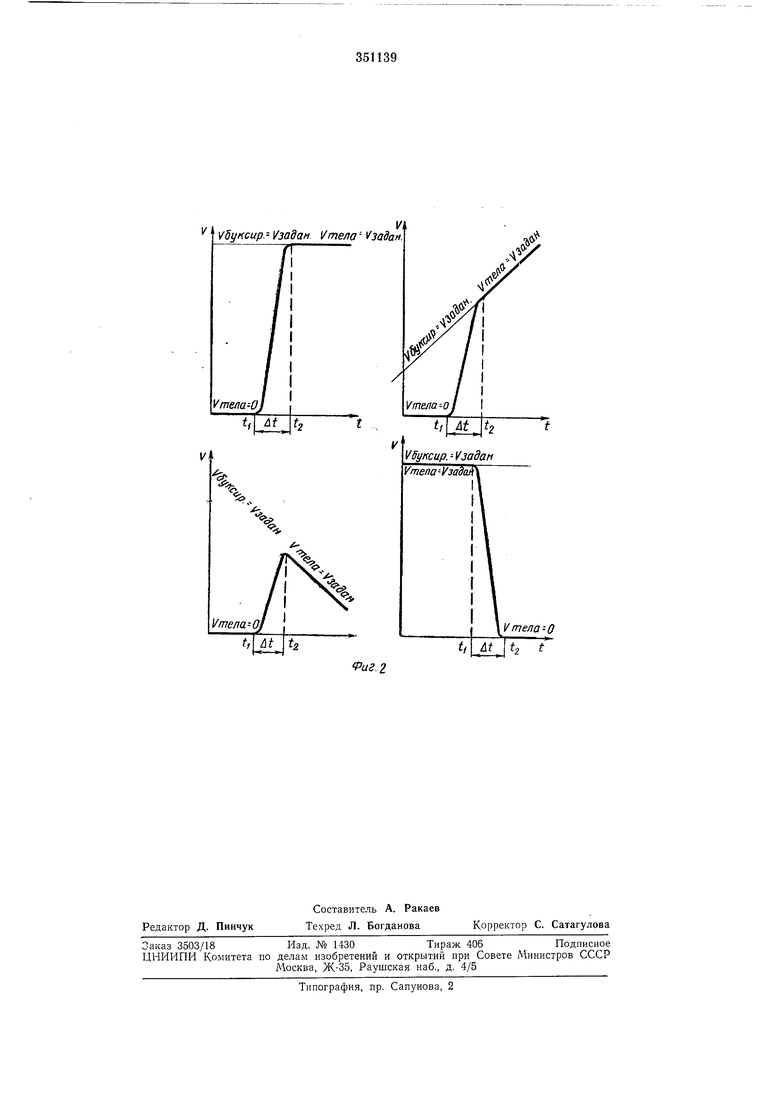
Па фиг. 1 схематически изображена установка для осуществления предложенного способа; на фиг. 2 - графики характерных режимов движения тел в случае импульсного изменения скорости, где ti - начало неупругого удара, 2 - конец неупругого удара, Д/ - время неупругого удара.
сировщик /. Время импульсивного изменения скорости (фиг. 2) регулируется временем неупругого удара в момент подхвата иснытуемого тела буксировщиком или в момент схода его с буксировщика.
Для определения гидродинамических характеристик динамометрированных испытуемых тел 2 (в случае импульсного возникновения движения и последующего движения тел в заданном режиме) буксировщику / сообщается заданный режим движения. Динамометрированное испытуемое тело устанавливается неподвижно на заданной глубине в определенном месте олытного бассейна и удерживается державками 3.
При прохождении буксировщика над испытуемым телом оно подхватывается во время неупругого удара захватами 4. После этого буксировщик продолжает движение вместе с испытуемым телом. Время достижения заданной, скорости испытуемым телом определяется временем-нё %ругого удара при подхвате его буксирбвщиком (фиг. 2). Изменяя время неупругога-.)а, можно получить различную стенепь приближения к закону импульсного (cKa4ffqo6j|a3Horo) изменения скорости.- -«Предлагаемый способ получить гидродинамические характеристики цилиндра при импульсном возникновенни движения в диалазоне чисел / е б-10-2-10° (скорость буксировки при этом постоянна и соответственно равняется 1-3 м1сек, диаметр пилиндра (i 0,007 м. Масса буксировщика в тысячу раз больше массы испытуемого цилиндра. Время достижения заданной постоянной скорости цилиндром из состояния покоя находится в пределах 0,02-0,04 сек. Это время задано заранее, исходя из инерционности измерительной аппаратуры.
Описанный способ дает возможность с больщей точностью непосредственно установить характер изменения гидродинамических коэффициентов и величины их максимального значения после импульсного изменения
скорости испытуемого тела при различных режимах движения в большем диапазоне чисел Рейнольдса.
Предмет изобретения
Спосо.6 моделирования нестационарного движения модели в лабораторных условиях при определении ее гидродинамических характеристик с помощью движущегося над поверхностью гидроканала буксировщика, заключающийся в том, что буксировщику сообщают заданную скорость, отличающийся тем, что, с целью повышения точности эксперимента, испытуемую модель сначала устанавливают неподвижно в гидроканале, а затем подхватывают движущимся буксировщиком.
Vтела-Vзадан
VI
VSyKcup.Vзадан Vmena V3adaif
fPuZ.l
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ моделирования динамического действия жидкости на объект | 1981 |
|
SU1033895A1 |
| УСТРОЙСТВО ДЛЯ БУКСИРОВОЧНЫХ ИСПЫТАНИЙ МАСШТАБНЫХ МОДЕЛЕЙ НАДВОДНЫХ СУДОВ НА ОТКРЫТОМ ВОДОЕМЕ | 2015 |
|
RU2579239C1 |
| Буксировочное устройство для гидродинамических испытаний моделей судов в открытых водоемах | 1980 |
|
SU933536A1 |
| БУКСИРУЕМЫЙ ПОДВОДНЫЙ АППАРАТ | 2010 |
|
RU2419574C1 |
| БУКСИРУЕМЫЙ ПОДВОДНЫЙ АППАРАТ, ОСНАЩЕННЫЙ ГИДРОАКУСТИЧЕСКОЙ АППАРАТУРОЙ ДЛЯ ОБНАРУЖЕНИЯ ЗАИЛЕННЫХ ОБЪЕКТОВ И ТРУБОПРОВОДОВ | 2010 |
|
RU2463203C2 |
| Способ буксировки самолетов с использованием малогабаритного буксировщика с дистанционным управлением | 2016 |
|
RU2618611C1 |
| Малогабаритный буксировщик воздушных судов с дистанционным управлением | 2015 |
|
RU2645175C2 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ АЭРОДИНАМИЧЕСКИХ ХАРАКТЕРИСТИК ЛЕТАТЕЛЬНОГО АППАРАТА | 2013 |
|
RU2561829C2 |
| Стенд для экспериментального исследования процессов движения на плаву и затопления двухзвенного гусеничного транспортера | 2023 |
|
RU2804146C1 |
| МАЛОГАБАРИТНЫЙ БУКСИРОВЩИК БЕСПИЛОТНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ САМОЛЕТНОГО ТИПА С АВТОМАТИЧЕСКИМ УПРАВЛЕНИЕМ | 2020 |
|
RU2744085C1 |