СО
оо
СХ)
г
01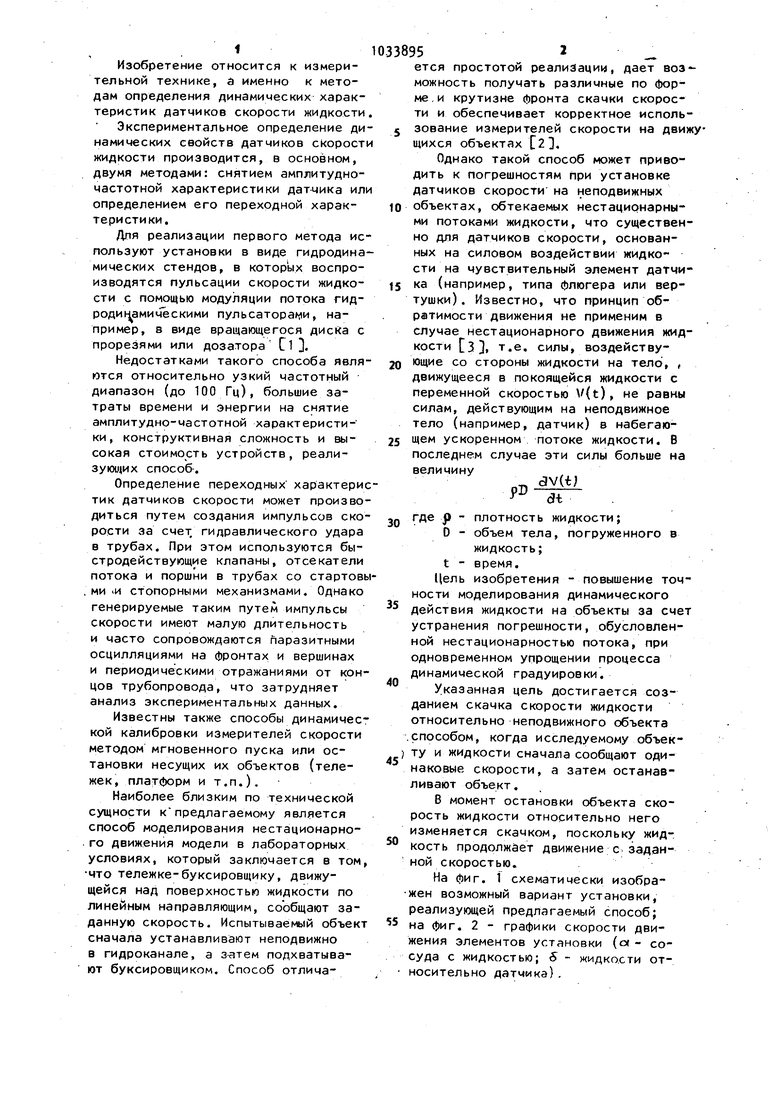

И/
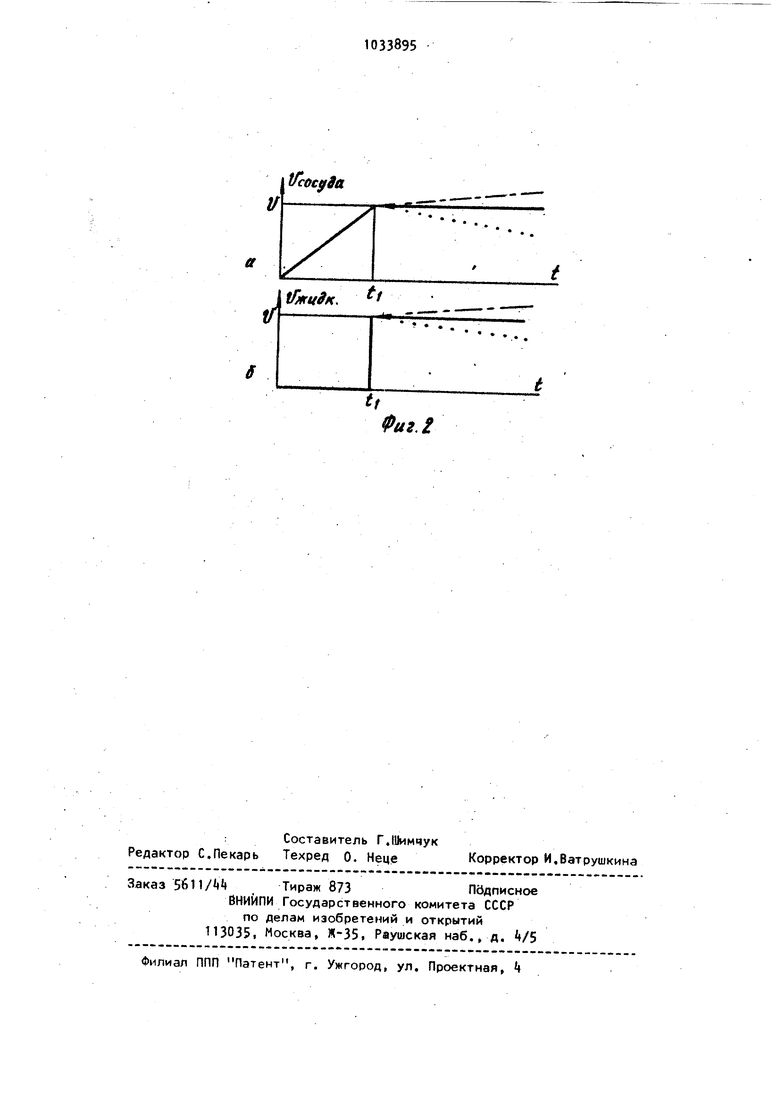
I Изобретение относится к измерительной технике, и именно к методам определения динамических характеристик датчиков скорости жидкости Экспериментальное определение ди намических свойств датчиков скорост жидкости производится, в основном, двумя методами: снятием амплитудночастотной характеристики датчика ил определением его переходной характеристики. Для реализации первого метода ис пользуют установки в виде гидродина мических стендов, в которых воспроизводятся пульсации скорости жидкости с помощью модуляции потока гидродинамическими пульсаторами, например, в виде вращающегося дисКа с прорезями или дозатора Cl . Недостатками такого способа явля ются относительно узкий частотный диапазон (до 100 Гц), большие затраты времени и энергии на снятие амплитудно-частотной характеристики, конструктивная сложность и высокая стоимость устройств, реализуюи их способ-. Определение переходных характери тик датчиков скорости может произво диться путем создания импульсов ско рости за счет/ гидравлического удара в трубах. При этом используются быстродействующие клапаны, отсекатели потока и поршни в трубах со стартов ,ми И стопорными механизмами. Однако генерируемые таким путем импульсы скорости имеют малую длительность и часто сопровождаются паразитными осцилляциями на фронтах и вершинах и периодическими отражаниями от кон цов трубопровода, что затрудняет анализ экспериментальных данных. Известны также способы динамичес кой калибровки измерителей скорости методом мгновенного пуска или остановки несущих их объектов (тележек, платформ и т.п.). Наиболее близким по технической сущности кпредлагаемому является способ моделирования нестационарно.го движения модели в лабораторных условиях, который заключается в том что тележке-буксировщику, движущейся над поверхностью жидкости по линейным направляющим, сообщают заданную скорость. Испытываемый объек сначала устанавливают неподвижно в гидроканале, а з-атем подхватывают буксировщиком. Способ отлича52ется простотой реализации, дает возможность получать различные по форме, и крутизне фронта скачки скорости и обеспечивает корректное использование измерителей скорости на движущихся объектах Г21). Однако такой способ может приводить к погрешностям при установке датчиков скорости на неподвижных объектах, обтекаемых нестационарными потоками жидкости, что существенно для датчиков скорости, основанных на силовом воздействии жидкости на чувствительный элемент датчика (например, типа флюгера или вертушки). Известно, что принцип обратимости движения не применим в случае нестационарного движения жидкости З 3, т.е. силы, воздействующие со стороны жидкости на тело, , движущееся в покоящейся жидкости с переменной скоростью V{t), не равны силам, действующим на неподвижное тело (например, датчик) в набегающем ускоренном потоке жидкости. В последнем случае эти силы больше на величину где р - плотность жидкости; D - объем тела, погруженного в жидкость; t - время. Цель изобретения - повышение точности моделирования динамического действия жидкости на объекты за счет устранения погрешности, обусловленной нестационарностью потока, при одновременном упрощении процесса динамической градуировки. Указанная цель достигается созданием скачка скорости жидкости относительно неподвижного объекта способом, когда исследуемому объекту и жидкости сначала сообщают одинаковые скорости, а затем останавливают объект. В момент остановки объекта скорость жидкости относительно него изменяется скачком, поскольку жидкость продолжает движение с заданной скоростью. На фиг. 1 схематически изображен возможный вариант установки, реализующей предлагаемый способ; на фиг. 2 - графики скорости движения элементов установки (а - сосуда с жидкостью; S - жидко.сти относительно датчика), Установка работает следующим об разом. Испытываемый датчик 1 (фиг. 1) устанавливают в сосуде 2 с жидкостью, который подвешен на гибкой нити 3. Эта нить перекинута через неподвижные блоки 4. К одному конц нити 3 подвешен груз 5, масса которого равна массе сосуда 2 с жидкостью, закрепленного на другом конце нити. На этом же.конце закре плен дополнительный груз 6, вес которого компенсирует силы трения в блоках и нити при движении сосуда 2 с заданной скоростью. Для соз дания требуемой скорости служит устанавливаемый-на сосуд 2 груз 7. Груз 7 жестко связан с испытываемы датчиком 1. Движение груза 7 ограничивается упорами 8, а сосуда с жидкостью - амортизированной площа кой 9. Для фиксации сигналов датчи ка 1 и таймера 10 служит регистратор 11. Все подвижные элементы установки в исходном положении удерживаются нитью 12. При определении динамических ха рактеристик датчик 1 устанавливают в сосуде с жидкостью на глубине где V .- величина задаваемого ска ка скорости; t,.f- время установления показа ний датчика. С помощью нити 12 груз 7 с сосудом 2 устанавливают над упорами 8 на высоте Ъ .2с, где а - ускорение движения сосуда жидкостью. Рабочий цикл начинается после обрь1ва нити 12 (например, с помощью электрического тока). Под действием силы тяжести груз 7 с датчиком 1 и сосуд 2с жидкост движутся равноускоренно с ускореI; . ,;нием а. В момент времени t Tl-- 954 фиг. 2), когда сосуд и датчик достигнут скорости А/, происходит остановка груза 7 с датчиком 1 на упорах 8, создавая скачок скорости продолжающей двигаться жидкости относительно остановившегося датчика. После момента t величина скорости V/ сосуда с жидкостью может оставаться постоянной, если (сплошная линия на фиг. 2), где т масса груза 6, g - ускорение свободного падения, F - сила трения в движущихся частях установки, возрастать, если т F (штрихпунктир на фиг. 2), убывать, если (пунктир на фиг. 2)-. Сигналы испытываемого датчика 1 вместе с метками времени таймера 10 фиксируются регистром 11. Обработка полученной осциллограммы (при известиях h и а) позволяет определить параметры скачка скорости и соответствующую реакцию на него датчика. Кроме повышения точности определения динамических характеристик датчиков скорости жидкости предлагавмый способ по сравнению с известными обладает большей экономичностью, так как осуществление рабочего цикла может производиться без потребления энергии от электросети, аккумуляторов, двигателей внутреннего сгорания и т.п. внешних источников. Устройство, реализующее способ, не требует для своего размещения 6oj ших рабочих площадей, например, как тидроканалы, гидродинамические трубы и др. капитальные сооружения, может бмть простым и дешевым как в изготовлении, так и в эксплуатации , поскольку не содержит высокоточных кинематических пар, быстродействующих затворов и т.п. сложных и дорогих механизмов. Благодаря этомувозможно использование способа не только в стационарных, лабораторных, но и в полевых, экспедиционных условиях.
Фиг,
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Гуткин В.Г, и др | |||
| Поверочные гидродинамические стенды | |||
| Труды метрологических институтов СССР Вып | |||
| Соломорезка | 1918 |
|
SU157A1 |
