1I
Изобретение относится к устройству для управления навесным орудием, например плугом.
Известно устройство для комбинированного управления навесным орудием, которое при включении на регулировку позиции обеспечивает одновременное влияние тягового усилия, т. е. связь гидрораепределительного механизма с силовым датчиком.,
Однако известные устройства не устраняют одного из основных недостатков силового регулирования - неустойчивого хода плуга на почвах с переменной плотностью.
Например, при переходе с участка ноля с одной плотностью на участок с большей плотностью происходит выглубление орудия на Пропорциональную изменению плотности величину и не сохраняется заданная глубина хода плуга. /
Цель изобретения - создание устройства, обеспечивающего устойчивый ход известного орудия при обработке иочвы с переменной плотностью.
Указанная цель достигается благодаря тому, что устройство имеет две регулируемые односторонние механические связи, соединяющие силовой и позиционный датчики с подпружиненным балансиром, взаимодействующим с золотником второго распределителя и щарнирно связанным с рукояткой управления.
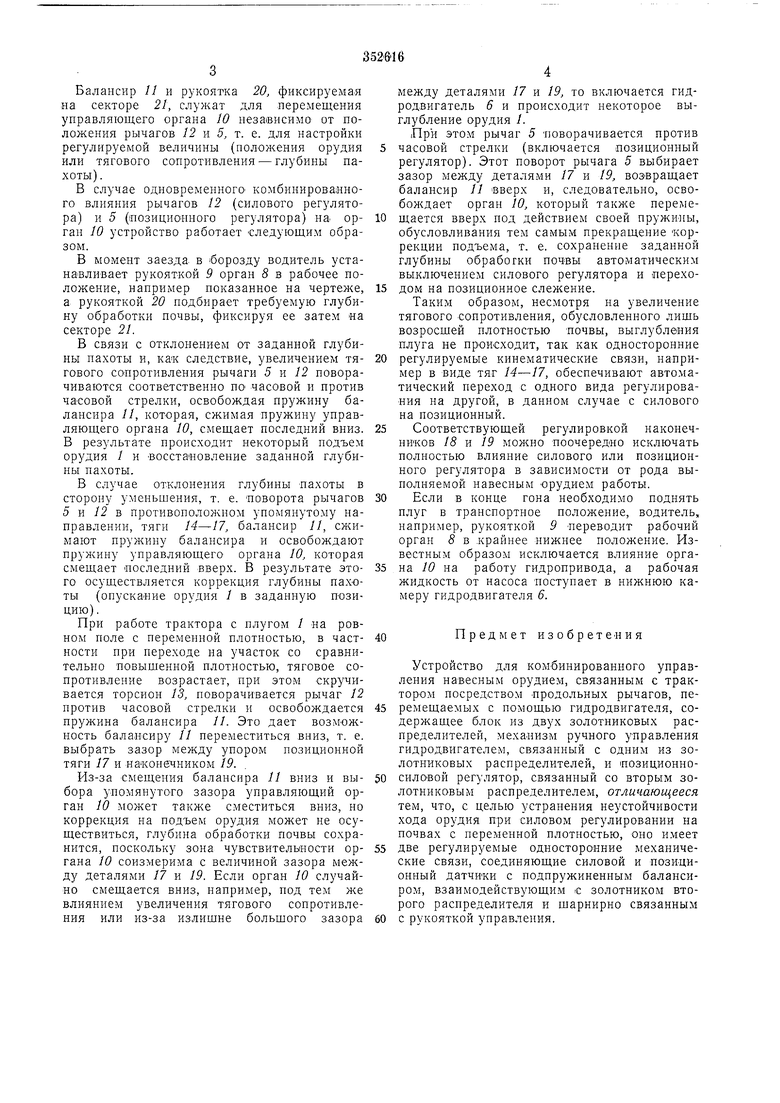
На чертеже схематически показан вариант исиолиения предлагаемого устройства для комбинированного управления навесным орудием.
Орудие 1, например плуг, закреплено на продольных рычагах 2 и 3 механизма навески, включающего также щарнирно соединенные звенья 4 и 5. Причем рычаг 5 является одновременно позиционным датчиком. Гидропривод навески включает гидродвигатель 6 и блок управляющих органов 7 (золотниковых распределителей), содержащий
первый управляющий орган 8 с рукояткой 9
и второй унравляющий орган W, поджатый
к подпружиненному балансиру 11 пружиной.
Л1еханизм управления режимом работы
орудия представляет собой позиционно-силовой регулятор, включающий силовой датчик в виде рычага 12, посаженного на торсион 13, тяги 14 и 15, щарнирно закрепленные соответственно на рычагах /2 и 5 и соединенные с балансиром 11 тягами 16 и 17, работающими аналогично гибким тросикам Боудэна, т. е. односторонне, благодаря наличию, например, резьбовых иаконечников 18 и 19. С помощью наконечников осуществляется предварительная регулировка длины тяг 16
Балансир // и рукоятка 20, фиксируемая на секторе 21, служат для перемещения управляющего органа W независимо от положения рычагов 12 и 5, т. е. для настройки регулируемой величины (положения орудия или тягового сопротивления - глубины пахоты).
В случае одновременного комбинированного влияния рычагов 12 (силового регулятора) и 5 (иозициОНного регулятора) на орган 10 устройство работает следующим образом.
В момент заезда в -борозду водитель устанавливает рукояткой 9 орган 8 в рабочее положение, например показанное на чертеже, а рукояткой 20 подбирает требуемую глубину обработки почвы, фиксируя ее затем «а секторе 21.
В связи с отклонением от заданной глубины пахоты и, кяк следствие, увеличением тягового сопротивления рычаги 5 и /2 поворачиваются соответственно по часовой и против часовой стрелки, освобождая пружину балансира //, которая, сжимая пружину управляющего органа 10, смещает последний вниз. В результате происходит некоторый подъем орудия / и восстаиовлепие заданной глубины пахоты.
В случае отклонения глубины пахоты в сторону уменьшения, т. е. поворота рычагов 5 и /2 в противоположном упомянутому направлении, тяги 14-17, балансир 11, сжимают пружину балансира и освобождают пружину управляющего органа 10, которая смещает последний вверх. В результате этого осуществляется коррекция глубины па.хоты (опускание орудия 1 в заданную п-озицию).
При работе трактора с плугом / на ровном поле с переменной плотностью, в частности при переходе на участок со сравнительно повыщенной плотностью, тяговое сопротивление возрастает, при этом скручивается торсион 13, поворачивается рычаг 12 против часовой стрелки и освобождается балансира //. Это дает возможность балансиру 11 переместиться вниз, т. е. выбрать зазор между упором позиционной тяги 17 и наконечником 19.
Из-за смещения балансира // вниз и выбора упомянутого зазора управляющий орган 10 может также сместиться вниз, но коррекция на подъем орудия может не осуществиться, глубина обработки почвы сохранится, поскольку зона чувствительности органа 10 соизмерима с величиной зазора между деталями 17 и 19. Если орган 10 случайно смещается вниз, например, под тем же влиянием увеличения тягового сопротивления или из-за излищне большого зазора
между деталями 17 и 19, то включается гидродвигатель 6 и происходит некоторое выглубление орудия /. Лри этом рычаг 5 поворачивается против
часовой стрелки (включается позиционный регулятор). Этот поворот рычага 5 выбирает зазор между деталями 17 и 19, возвращает балансир 11 вверх и, следовательно, освобождает орган 10, который также перемещается вверх под действием своей пружины, обусловливания тем самым прекращение коррекции подъема, т. е. сохранение заданной глубины обработки почвы автоматическим выключением силового регулятора и переходом на позиционное слежение.
Таким образом, несмотря на увеличение тягового сопротивления, обусловленного лищь возросщей плотностью почвы, выглубления плуга не происходит, так как односторонние
регулируемые кинематические связи, например в виде тяг 14-17, обеспечивают автоматический переход с одного вида регулирования на другой, в данном случае с силового на позиционный.
Соответствующей регулировкой наконечников 18 и 19 можно поочередно исключать полностью влияние силового или позиционного регулятора в зависимости от рода выполняемой навесным орудием работы.
Если в конце гона необходимо поднять плуг в транспортное положение, водитель,, например, рукояткой 9 переводит рабочий орган 8 в .крайнее нижнее положение. Известным Образом исключается влияние органа 10 на работу гидропривода, а рабочая жидкость от насоса поступает в нижнюю камеру гидродвигателя 6.
Предмет изобретения
Устройство для комбинированного управления навесным орудием, связанным с трактором посредством продольных рычагов, перемещаемых с помощью гидродвигателя, содержащее блок из двух золотниковых распределителей, механизм ручного управления гидродвигателем, связанный с одним из золотниковых распределителей, и позиционносиловой регулятор, связанный со вторым золотниковым распределителем, отличающееся тем, что, с целью устранения неустойчивости хода орудия при силовом регулировании на почвах с переменной плотностью, оно имеет
две регулируемые односторонние механические связи, соединяющие силовой и позидпонный датчики с подпружиненным балансиром, взаимодействующим с золотником второго распределителя и щарнирно связанным
с рукояткой управления.
76 7S W72 /5 75
,г 7 : ///7/у
Дст насоса
Слиб