1
Изобретение относится к сельскохозяйственному машиностроению, а именно к устройствам для автоматической вертикальной установки рабочих органов почвообрабатывающих орудий в зависимости от глубины обработки почвы.
Известен переключатель по авт. св. № 353664, который не обеспечивает влияние силового регулирования на преимущественно используемое позиционное регулирование.
1.1ель изобретения - предохранить тракториый агрегат от перегрузок путем автоматического перевода регулирующего золотника гидрораспределителя позиционно-силового регулятора, в положение «подъем под действием предельно сжатой пружины силового датчика при соответствующем режиме регулирования с последующим автоматическим возвратом регулирующего золотника в положения «опускание и «иейтраль.
Предлагаемый переключатель отличается тем, что подпружиненный корпус его снабжен двумя подвижными иа общей оси, установленной в том же корпусе, фиксаторами, один из которых при соответствующем режиме регулирования взаимодействует с подвижным и подпружинепным относительно связанного с позициоииым датчиком рычага переключателя упором, причем ход последнего ограничен выступом па том же рычаге, а другой фиксатор
свободно входит в прорезь рычага переключателя, связанного с силовым датчиком позиционно-силового регулятора.
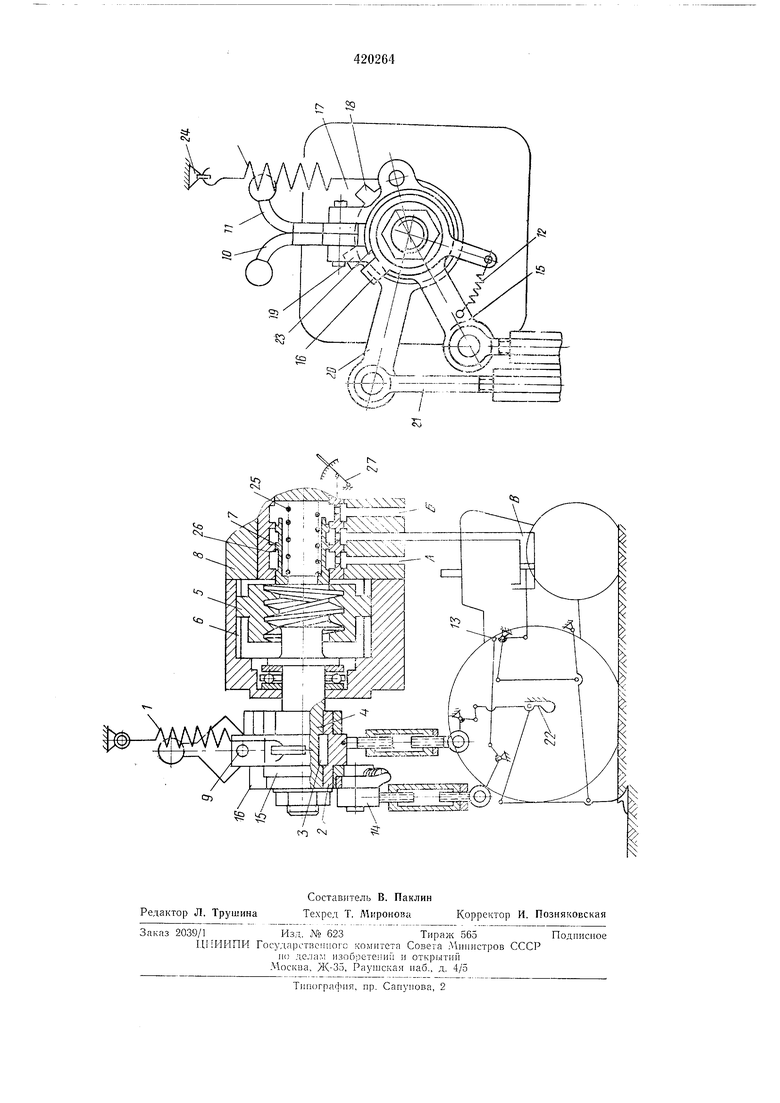
На чертеже изображеи автоматический переключатель в двух проекциях.
Переключатель имеет снабженный пружиной 1 корпус 2, кинематически связанный, папример, через щиопку 3, балансир 4 и гайку 5 в пазах 6 с регулирующим золотником 7 гидрораспределителя регулятора 8. На установленной в корпусе 2 оси 9 качаются два фиксатора 10 и 11, каждый из которых имеет два фиксированные ноложеиия относительно корпуса 2 (среднее и крайнее). При крайних положеПИЯХ фиксаторов один из них взаимодействует с подпружиненпым пружиной 12 и подвижным относительно связанного с иозипионным датчиком 13 через тягу 14 рычага 15 упором 16, а другой входит в прорезь 17, ограниченную
упорами 18 и 19 рычага 20, связанного через регулируемую тягу 21 с силовым датчиком в виде, например, присоединенной к корпусу трактора пружины 22. При среднем положении фиксаторов рычаг 20 и рычаг 15 с упором
16 и пружиной 12 могут достаточно свободно вращаться относительно корпуса 2, не влияя на регулирующий золотник 7, а при крайних положениях фиксаторов вращение рычагов 15 и 20 ограничено упором 16 и прорезью 17,
длииа которой пропорциопальна полной деформации пружины 22 си.лозого датчика регулятора. Вращение упора 16 относительно рычага 15 ограиичеио выступом 23 на рычаге 15. К выступу 23 при jio3Hi,io:;ioM регулировании постоянно прижат угср 16 пружиЮ : 2, При этом усилие пру}ки:ы -2 в момент одноврглгенного контакта унора 16 с выступом 23 п фиксатором 10 больи;е усилия пружнны 1, соединеииой с корпусом 24 трактора. В тот же момеит o6jn,ee минимальное усилие пружины 1 больше противоположиого но направлепию максимального усилия от соединенной с корпусом гидрораспределителя 8 пружины 25 регулиру1оп.его золотл-1ка 7. Для ручного и автоматического управления навесным орудием гидрораспределктель 8 нмеет три полоети: напорную А, сливиую Б и рабочую В. а для настройки регулятором заданного положеиия орудия отиосительио трактора - гильзу 26, связаииую с рукояткой управления 27.
Если необходимо только позинл-юнное регулирование сельскохозяйственных операций, при которых степень деформации пружииы 22 в основном несущее-;вснна (работа с навесной косилкой), нредлагаемое устройство работает следующим образом.
После перевода фиксаторов 10 и 1 в крайние положения, т. е. фнксатора 10 влево, а фиксатора 11 вправо, и гильзы 26 рукояткой настройки 27 вправо орудие с мехаиизмом иавески трактора будет опускаться в рабочее положение из-за сообш,ения между собой иолостей Б и В. Механизм навески опускается и, следовательно, неремещаетс.я датчик 13, который через тягу 14 враи.ает рычаг 15 против часовой стрелки, и из-за контакта упора 16 с фиксатором 10, создаваемого действием пружины 1, в том же направлении начинает вращаться корпус 2 с балансиром 4 и фиксатором 10. В этот момент усилие от пружины 12 больше усилия от npy}RHHb 1, поэтому нри отсутствии контакта фиксатора 11 с любым из упоров 19 или 18 (при соответстБуюнхей регулировке тяги 21) датчик 13 через корпус 2, балансир 4 и гайку 5 дает возможность зодотн,ику 7 сместиться влево и разобндить полости Б и В. Золотиик 7 займет иейтральное положение, при котором полость В заперта и навеска с орудием будут зафиксированы в рабочем положении Если Б этом случае у навесного орудия рабочие органы не касаются почвы, т. е. трактор работает, например, с косилкой, тяговое сопротивление которой сравнителыто невелико (почти не изменяется ноложеиие силового датчика регулятора в виде пружины 22), то при правильной регулировке тяги 21 упоры 18 и 19 не взаимодействуют с фиксатором И и, следовательно, с золотником 7. Таким образом, здесь наблюдается только чисто позиционное регулирование, обусловленное контактом упоров 16 и 10 и относительными жесткостями пружин 1; 12 и 25. Если косилка столкнется со случайным препятствием, пружина 22 предельно сдеформируется. В результате при правильном выборе длины прорези 17 пропорционально полной деформации пружины 22 унор 18 будет давить на фиксатор 11 с усилием, задаваезплм пружиной 22. Поскольку до подхода к препятствию золотник 7 находился в подожении «нейтраль н полость В была заперта, к момепту контакта упора 18 и фиксатора 11 корпус 2, рычаг 15, тяга 14 и датчик 13 представляют собой жесткую систему. Она может быть нарущена иереводом золотиика 7 из положения «иейтраль в положение «подъем, т. е. смещением его влево. Обеспечивается это тем, что при предельно сжатом состоянии пружины 22 упор 18 начинает давить на фиксатор
11.Это давление через корнус 2 и фиксатор 10 передается упору 16, который из-за жесткости системы вынужден, растягивая пружину
12,повернуться против часовой стрелки относительно все еще неподвижного рычага 15. Поворот иодпружиненного унора 16 дает возможпость пружине 22 подвернуть корпус 2 с балансиром в том же направлении и благодаря наличию гайки 5 и пружины 25 золотник 7 сместится влево и напорная полость А будет сообщена с рабочей полостью В. Жесткость
системы исчезнет и навеска с орудием будут подниматься вверх с максимальной скоростью до предельного транспортного положения или до тех пор, пока наступит перегрузка трактора. Если трактор будет перегружен, то пружииа 22 останется предельно сжатой и неподвижной. Теперь уже система датчик-тяга-рычаг-балансир превращается в жесткую, и изза контакта упора 18 и фиксатора 11 удерживает золотник 7 в положении «подъем, а перемещение навески с орудием вверх будет сопровождаться вращением рычага 15 по часовой стрелке относительно балансира 4 и упора 16 и, следовательно, дальнейшим растяжением нружины 12.
После преодоления орудием препятствия и прекращения перегрузки степень деформации пружины 22 уменьшится и фиксатор 11 и упор 18 обеспечат пружине 12 возможность преодолевать сопротивление пружины 1 и поворачивать упор 16 с фиксатором 10, корпусом 2 и балансиром 4 по часовой стрелке , что вызовет резкое перемещение золотиика 7 вправо, позволяющее сообщить полость В со сливом и опустить механизм навески с орудием. Орудие
будет опускаться до тех пор, пока упор 16 не упрется в выступ 23, а рычаг 15 не повернется вслед за датчиком 13 и механизмом навески трактора так, чтобы золотник 7 занял нейтральное положение относительно гильзы 26,
которую установил относительно корпуса 8 водитель рукояткой 27 еще до подхода агрегата к препятствию.
Таким образом, переключатель автоматически переводит регулирующий золотник в положение «подъем при встрече агрегата с препятствием и после преодоления его автоматически устанавливает орудие в прежнее положение относительно трактора. Если трактор работает с плугом на поле с
переменными рельефом местности и плотностью почвы, то степень деформации пружины 22 уже будет задана и при крайних положениях фиксаторов 10 и 11 возможно почти равновероятное влияние датчиков 13 и 22 на регулируюш,ий золотник 7 благодаря наличию упоров 16 и 19 на рычагах 15 и 20. То есть в этих условиях смешаное (комбинированное) регулирование или возможно влияние одного режима регулирования ia другой при нпеимущественном использовании наиболее целесообразного для выполнения данной сельскохозяйственной операции режима регулирования, но с предохранением трактора от перегрузок и с возможным снижением буксов;1ии; его ведущих колес.
В том случае, когда нет необходимости защищать трактор от перегрузок, .можно ус ранить влияние пружины 22 на золотник 7, если перевести фиксатор И в среднее положение. В результате будет только позиционное регулирование, обусловленное контактом фиксатора 10 с упором 16.
Во всех описанных ранее случаях автоматический переключатель гарантирует разгрузку насоса гидросистемы трактора автоматической установкой регулирующего золотника 7 в нейтральное положение в конце подъема навесной системы в транспортное положение. В конце гона водитель рукояткой управления 27 смещает гильзу 26 влево и напорная полость А сообщается с рабочей полостью В. В результате этого навесная система с орудием ноднимаются. Фиксатор 11 беспрепятственно перемещается по прорези 17 ставшего теперь неподвижным рычага 20 из-за исчезновения тягового сопротивления и деформации пружины 22 после отрыва рабочих органов орудия от поверхности почвы, поэтому контакт упоров 16 и 10 сохраняется. Этот контакт об з словливает движение золотника 7 влево под влиянием поднимающегося механизма навески трактора с датчиком 13 и восстанавливает согласованное движение гильзы 26 и того же золотника. В конце подъема механизма навескн это рассогласование устранится полностью благодаря автоматической установке золотпнка 7 в положение «нейтраль, запиранию полости В и, следовательно, фиксации орудия в транспортном положении. Примечательно, что з
описанном процессе функции водителя сводятся лингь к установке рукоятки 27 в положение, соответствуюн.ее транспортному полол :ению орудия, без последующего ручного удержания
ее в этом положении.
Для осуществления только сплового регулировапи; достаточно поставпть фпксатор 10, взаимоденс вующи с упором 16, в среднее положение, fi фиксатор I перевести в крайнее
правое положенно. В результате позиционный датчик 13 нотеряет связь с регулирующим золотнико:;. ;; jvopnvc перек,тючателя под действием пружпнз 1 повернется против часовой стрелки до хо.меита соприкосновения фиксатора 11. находящегося теперь в прорези 17 рычага 20, с упором 19. После этого положение орудия от:1ос;гте.т1.но трактора (заданная глубина почзообработл:) будет определяться величиной деформа1 ап1 пружипы 22 и положением гильзы 26 относительно корпуса 8 (положение, заданное воднтелем).
Предмет изобретения
Переключатель режимов регулирования для регулятора позицнонно-силового типа по авт. св. № 353664, о т л и ч а ю щ и и с я тем, что, с целью предо.храНення тракторного агрегата от перегрузок путем автоматического перевода
регулирующего золотника гидрораспределптеля познцнонно-снлового регулятора в положение «нодъем нод действием предельно сжатой пружнны снлового датчпка при соответствующем режиме регулирования с последующи.м автоматнчсскпм возвратом регулирующего золотннка гндрораснределнтеля в полол ения «опуска не. и «нейтральное, подпружиненный корпус переключателя снабжен двумя подвижны;,н на общей осп, установленной в
корпусе переклочсГ.ел.ч, фиксаторами, один пз которых прн соответствующем режиме регулирования Ез;л: 10деГ:с,вует с подвнжпым и подпружиненным от 1оснтельно связанного с позиционным датчнкч)}- рычага переклю - ателя упором, прнчс.м :;ол, последнего ограничен выстуном на io:.; ;ке ры-чи е, а друге) фиксатор свободно входит в прорезь рычага нереключателя, связанного с Орловым датчнком позиционпо-снлового регулятора.
IX и
3
. - 1ггг:-: --
:-:-.-/

| название | год | авторы | номер документа |
|---|---|---|---|
| ГИДРОРАСПРЕДЕЛИТЕЛЬ РЕГУЛЯТОРА ПОЗИЦИОННО- | 1972 |
|
SU352615A1 |
| ПЕРЕКЛЮЧАТЕЛЬ РЕГУЛЯТОРА ПОЗИЦИОННО-СИЛОВОГО ТИПА | 1972 |
|
SU353664A1 |
| УСТРОЙСТВО ДЛЯ СНИЖЕНИЯ БУКСОВАНИЯ ТРАКТОРА С УНИВЕРСАЛЬНОЙ ГИДРОНАВЕСНОЙ СИСТЕМОЙ | 1972 |
|
SU424523A1 |
| ГИДРАВЛИЧЕСКАЯ СИСТЕМА УПРАВЛЕНИЯ НАВЕСНЫМИ ОРУДИЯМИ СЕЛЬСКОХОЗЯЙСТВЕННОГО ТРАКТОРА | 1970 |
|
SU280074A1 |
| РАЗГРУЗОЧНЫЙ ПЕРЕКЛЮЧАТЕЛЬ РЕЖИМОВ РЕГУЛИРОВАНИЯ ДЛЯ РЕГУЛЯТОРА ПОЗИЦИОННО- СИЛОВОГО ТИПА | 1971 |
|
SU309668A1 |
| МЕХАНИЗМ ДЛЯ НАСТРОЙКИ, ПЕРЕКЛЮЧЕНИЯВИДОВ РЕГУЛИРОВАНИЯ ПОЛОЖЕНИЯ РАБОЧИХОРГАНОВ ОРУДИЙ И УВЕЛИЧЕНИЯСЦЕПНОГО ВЕСА ТРАКТОРА!.2 | 1972 |
|
SU426615A1 |
| ГИДРОСИСТЕМА С СИЛОВЫМ, ПОЗИЦИОННЫМ и КОМБИНИРОВАННЫМ РЕГУЛИРОВАНИЕМ ГЛУБИНЫОБРАБОТКИ | 1971 |
|
SU288820A1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ НАВЕСНОЙ СИСТЕМОЙ ТРАКТОРА | 1997 |
|
RU2126616C1 |
| УСТРОЙСТВО ДЛЯ КОМБИНИРОВАННОГО УПРАВЛЕНИЯ НАВЕСНЫМ ОРУДИЕМ | 1972 |
|
SU352616A1 |
| МЕХАНИЗМ ВЫРАВНИВАНИЯ НАГРУЗКИ ПО ОПОРНОЙ ПОВЕРХНОСТИ ТРАКТОРА | 2002 |
|
RU2236978C2 |