Изобретение может найти применение при формировании управляющих цепей систем автоматического управления, в частности, в системах управления летательными аппаратами, когда требуется уменьшить вредное, влияние переменных по величине и знаку обратных связей.
Известны системы автоматического управления, содержащие динамический ограничитель координат, соединенный с входом регулятора объекта управления, выход которого связан с одним из входов динамического огр-аничителя координат и через звено обратной связи - с входом блока формирования управляющей команды.
Однако известные системы не обеспечивают высокой надежности и быстродействия.
Цель изобретения - увеличение быстродействия системы и надежности ее работы.
Цель достигается тем, что в предлагаемой системе автоматического управления дополнительно установлены последовательно соединенные фильтр и нелинейное звено типа зоны нечувствительности, а также усилитель.
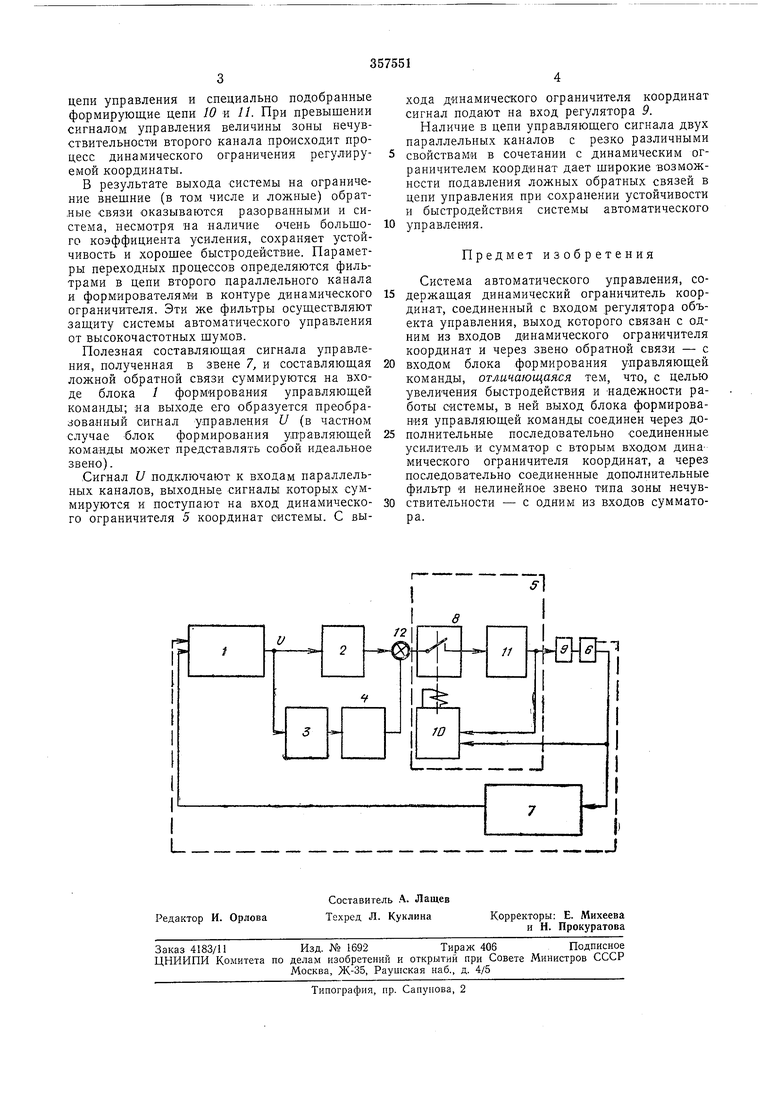
На чертеже дана блок-схема предлагаемой системы.
объект управления 6, звено 7 обратной связи, коммутатор 8 цепи управления, регулятор 9, формирующие цепи 10 и 11, сумматор 12.
Первый канал является линейной цепью, состоящей из усилителя 2 с достаточно малым коэффициентом усиления, второй канал состоит из последовательно включенных запаздывающего фильтра 3 и нелинейного звена 4 с характеристикой типа зоны нечувствительности и большим коэффициентом усиления. . ,
При малой величине управляющего сигнала, меньшей зоны нечувствительности второго канала, работает только первый канал, коэффициент усиления которого выбирают из условий надежной устойчивости системы с учетом ложных обратных связей. Точность обработки сигнала при этом надает, однако ошибка не может превышать величину зоны нечувствительностн по сигналу управления во втором канале. Величину этой зоны выбирают из условий допустимых погрешностей отработки сигнала унравления при малых его значениях. При нодключении второго канала сигнал управления нолучает большое усиление, что заставляет срабатывать механизм динамического ограничения величины регулируемой координаты. Динамический ограничитель регулируемой
цепи управления и специально подобранные формирующие цепи 10 и 11. При превышении сигналом управления величины зоны нечувствительности второго канала происходит процесс динамического ограничения регулируемой координаты.
В результате выхода системы на ограничение внешние (в том числе и ложные) обратные связи оказываются разорванными и система, несмотря на наличие очень большого коэффициента усиления, сохраняет устойчивость и хорошее быстродействие. Параметры переходных процессов определяются фильтрами в цепи второго параллельного канала и формирователями в контуре динамического ограничителя. Эти же фильтры осуществляют защиту системы автоматического управления от высокочастотных шумов.
Полезная составляющая сигнала управления, полученная в звене 7, и составляющая ложной обратной связи суммируются на входе блока / формирования управляющей команды; яа выходе его образуется преобразованный сигнал управления U (в частном случае блок формирования управляющей команды может представлять собой идеальное звено).
Сигнал и подключают к входам параллельных каналов, выходные сигналы которых суммируются и поступают на вход динамического ограничителя 5 координат системы. С выхода динамического ограничителя координат сигнал подают на вход регулятора 9.
Наличие в цепи управляющего сигнала двух параллельных каналов с резко различными свойствами в сочетании с динамическим ограничителем координат дает широкие возможности подавления ложных обратных связей в цепи управления при сохранении устойчивости и быстродействия системы автоматического управления.
Предмет изобретения
Система автоматического управления, содержащая динамический ограничитель координат, соединенный с входом регулятора объекта управления, выход которого связан с одним из входов динамического ограничителя координат и через звено обратной связи - с
входом блока формирования управляющей команды, отличающаяся тем, что, с целью увеличения быстродействия и -надежности работы системы, в ней выход блока формирования управляющей команды соединен через дополнительные последовательно соединенные усилитель и сумматор с вторым входом динамического ограничителя координат, а через последовательно соединенные дополнительные фильтр и нелинейное звено типа зоны нечувствительности - с одним из входов сумматора.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ПАРАМЕТРАМИ ЭЛЕКТРОМЕХАНИЧЕСКОЙ СИСТЕМЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2414048C1 |
| Система регулирования турбины | 1980 |
|
SU918452A1 |
| РЕЛЕЙНОЕ САМОНАСТРАИВАЮЩЕЕСЯ УСТРОЙСТВО | 1969 |
|
SU251045A1 |
| Частотно-импульсный регулятор | 1985 |
|
SU1287100A1 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ В НЕЛИНЕЙНОЙ СИСТЕМЕ И СЛЕДЯЩАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1999 |
|
RU2149437C1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД | 1999 |
|
RU2161579C1 |
| СПОСОБ РЕГУЛИРОВАНИЯ ЧАСТОТЫ ВРАЩЕНИЯ РОТОРА РЕАКТИВНОЙ ГИДРАВЛИЧЕСКОЙ ТУРБИНЫ И ПИД-РЕГУЛЯТОР ЧАСТОТЫ ВРАЩЕНИЯ СИЛЬНОГО ДЕЙСТВИЯ | 2021 |
|
RU2781087C1 |
| Реверсивный электропривод с двухзонным регулированием частоты вращения | 1978 |
|
SU780135A1 |
| УСТРОЙСТВО КООРДИНИРОВАННОГО РЕГУЛИРОВАНИЯ УГЛОВОГО БОКОВОГО ДВИЖЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА | 1990 |
|
RU2047888C1 |
| РЕЛЕЙНЫЙ ПНЕВМО-ГИДРОПРИВОД С ВИБРАЦИОННОЙ ЛИНЕАРИЗАЦИЕЙ СИСТЕМ УПРАВЛЕНИЯ РАКЕТ И УСТАНОВОК ВООРУЖЕНИЯ | 2003 |
|
RU2243491C1 |
