Изобретение относится к области автоматизации металлургического производства, преимущественно к автоматизации прокатных станов.
Известно устройство для автоматической компенсации возмущений при выборе механических люфтов в измерительном редукторе нажимного механизма прокатного стана, в котором для выбора механических люфтов в измерительном редукторе используются специальные моментные двигатели, а.для достижения постоянства статического момента в этих двигателях используются тахогенераторы, сочлененные с нажимными винтами .
Известно также устройство, в котором выбор механических люфтов в измерительных редукторах также осуществляется с помощью моментных двигателей, якори которых соединены последовательно и встречно и присоединены к общему нерегулируемо му источнику питания .
Недостаток этих устройств заключается в их сложности, так как для их реализации требуется установка на механизме дополнительных редукторов, двигателей, источников питания, регуляторов тока. Указанные недостатки не позволяют использовать упомянутые устройства на целом ряде механизмов: направляющих линейках, механизмах установки вертикальных валков и т.д.
Наиболее близкой к,изобретению . по технической сущности и достига- . емому результату является цифроаналоговая система, в которой многоразрядный цифровой датчик положения сочлененный с управляемым механизмом, вырабатывает число в двоичном коде, соответствующее действительному положению механизма, которое подается на один из двух входов сумматора. Заданное положение механизма в двоичтном коде подается на второй вход сумматора.
Код рассогласования, вычисленный в сумматоре, и знак этого рассогласования поступает на преобразователь код-аналог, где преобразуется ваналоговый сигнал, который воздействует на регулятор положения, соединенный последовательно через регулятор скорости и регулятор тока с тиристорньм преобразователем, от которого получает питание двигатель, сочлененный с управляемым механизмом |3 .
Недостатком этой цифро-аналоговой системы управления является неточность управления положением тяжелых металлургических механизмов, которые в ходе технологического процесса подвергаются силовым воздействиям К таким механизмам следует отнести
механизмы установки валков, направляющие линейки, манипуляторы и т.д.
При перемещении этих механизмов в сторону, совпадающую с направлением силовых воздействий, происходит раскрытие люфтов в трансмиссии, соединяющей двигатель с механизмом.
Например, при перестройке механима установки валков вертикальных клетей на большую, по сравнению с предыдущей, величину межвалкового .зазора, положение двигателя после остановки определяется положением датчика, а положение механизма отличается от заданного на величину люфтов в трансмиссии.
При входе металла в валки положение механизма под действием приложенного усилия изменяется и становится равным заданному, однако в прцессе такого перемещения механизма к трансмиссии прикладываются значительные ударные нагрузки, которые, в конечном итоге, приводят к преждевременному износу оборудования. В том случае, если датч-ик положения сочленен с механизмом, то при приложении усилий изменяется положение механизма относительно заданного значения, поскольку двигатель был, в этом случае, остановлен в положении, не совпадающим с заданным.
Цель изобретения заключается в повышении надежности работы механизмов и повышении точности их установки в заданное положение.
В данном технологическом решении во всех случаях позиционирование (установка механизма в .заданное положение) производится со стороны, противоположной силовьом воздейст.ВИЯМ на механизм, что исключает люфты в трансмиссии.
Указанная цель достигается тем, что в цифро-аналоговую систему упраления положением механизмов, в частности механизмов прокатных станов, содержащую электродвигатель, механически соединенный с механизмом, датчиком скорости и датчиком положения механизмов и электрически соединенный с регулируемым преобразователем напряжения, вход которого последовательно соединен с .преобразователем код - аналог, входы которого соединены с информационными и двумя знаковыми разрядами сумматора, входы которого соединены с. датчиком и задатчиком положения механизма, между сумматором и преобразователем код - аналог дополнительно установлен блок выбора люфто состоящий из двух элементов памяти, элемента И, элемента ИЛИ, элемен- та ИЛИ-НЕ и ключа, причем единичный вход первого элемента памяти соединен с плюсовым знаковьм разрядом
сумматора, вход сброса соединен с элементом И, а выход соединен с тремя входами - с плюсовым знаковьом рарядом преобразователя код - аналог, одним из входов элемента ИЛИ, другой вход которого соединен с информационным разрядом cyNwaTopa, а выход соединен с информационным разрядом входа преобразователя код - аналог , с управляющим входом ключа (Запрет ), вход которого соедине с минусовым знаковым разрядом на выходе сумматора , а выход с минусовьам знаковым разрядом входа преобразователя код-аналог, входы элемента И соединены с выходом второго элемента памяти и с выбранным сочетанием К-информационных разрядов сумматора причем единичный- вход второго элемента памяти соединен с выходом элемента ИЛИ-НЕ, входы которого соединены со всеми информационными разрядами с умматора, а вход, сброг са этого элемента памяти соединен -с выходом элемента И. I
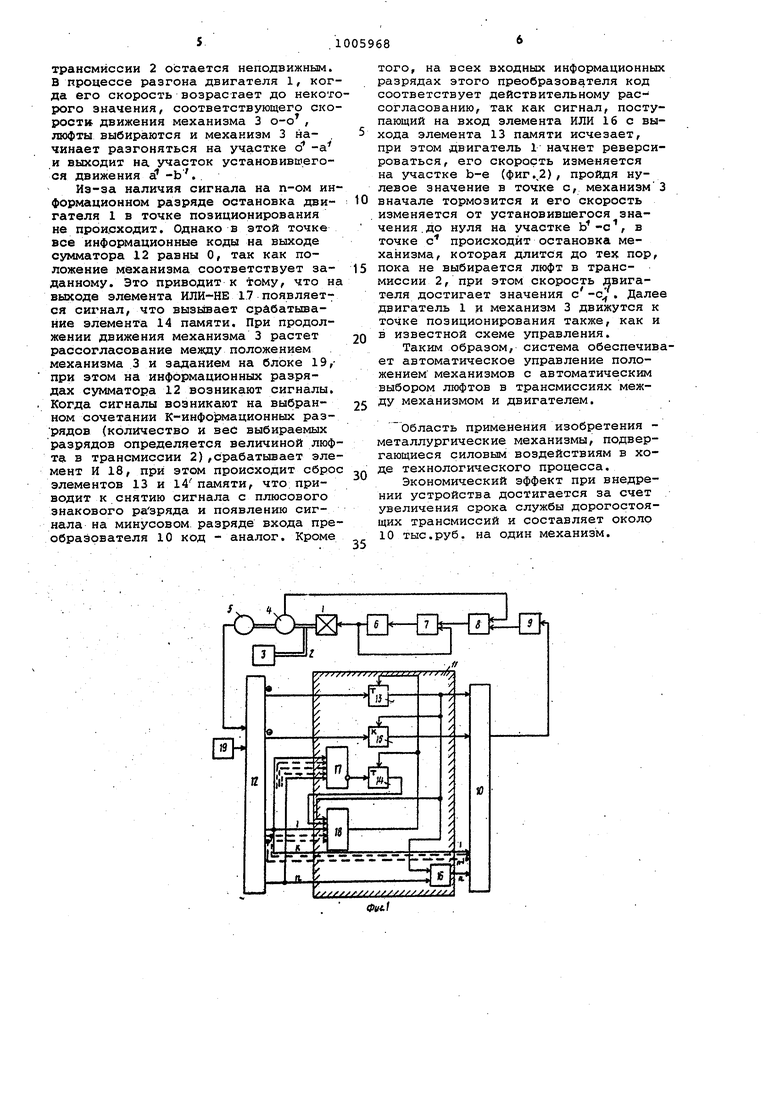
На фиг.1 изображена структурная схема цифро-аналоговой системы управления положением механизмов; на фиг,2 - фазовые траектории, пояснякщие принцип управления положением механизмов.
Цифро-аналоговая система управления (фиг,1) состоит из двигателя который с помощью трансмиссии 2 сопряжен с механизмом 3, датчиком 4 скорости и датчиком 5 положения механизмов. Питание двигателя 1 осуществляется от. управляемого источника напряжения, вход которого соединен с последовательно соединенными аналоговыми регуляторами тока 7, скорост.и 8 и положения 9, Вход регулятора 9 положения соединен с выходом преобразователя 10 код-аналог, входы которого имеют
I I «I два знаковых разряда + и и п-информационных .разрядов, причем знаковпе разряды и п-ый информационный разряд соединены с блоком 11 выбора люфтов, остальные информационные разряды от 1-го до (n-l)-ro соединены с соответствующими разрядами выхода сумматора 12, Бпбк 11 выбора люфтов содержит два элемента 13 и 14 памяти, вход элемента 13 памяти соединен с плюсовым знаковым разрядом сумматора 12, а выход - с входом трех элементов: плюсовым знаковым разрядом преобразователя 10 код - аналог, входом ключа 15 и входом элемента ИЛИ 16, второй вход которого соединен с п-ым информационньлм разрядом сумматора 12, а выход -. с п-ым информационным разрядом преобразователя 10 код - аналог. Вход элемента 1 памяти соединен с выходом элемента
ИЛИ-НЕ 17, входы которого прнсоединены ко всем п-информационным разрядам сумматора 11, выход элемента 14 памяти соединен с входом элемента И 18, остальные входы которого присоединены к выборным К-информационным разрядам сумматора 12, Выход элемента И 18 соединен с входами сброса элементов 13 и 14 памяти, входы сумматора 12 соединены с -блоком 19
задания и датчиком 5 положения.
Цифро-аналоговая система управления положением механизмов -работает следующим образом.
Если в сумматор 12 с помощью блока 19 задания вводится координата, определяющая новое положение механизма, которая по своему значению меньше координаты, в которой находится механизм, и которая вводится в сумматор .12 от датчика 5 положения, то на выходе сумматора 12
появляется сигнал в минусовом знаковом разряде, на вход преобразователя код - аналог поступает инФормационный код, при этом система управления обрабатывает сигнал рас-согласования также, как и в известной системе управления, В этом случае блок 11 выбора люфтов в обработке рассогласования не участвует.
Есликоордината нового положения механизма больше старой координаты, на выходе сумматора появляется сигнал в плюсовом знаковом разряде и в
информационных разрядах при эт.ом срабатывает элемент 13 памяти , появляется сигнал на входе плюсового знакового разряда преобразователя 10 код - аналог, накладывается с помощью ключа 15 запрет на прохождение минусового сигнала в преобразователь 10 аналог - код, срабатывает элемент ИЛИ 16 и на входе п-ро разряда преобразователя.10 код --аналог появляется сигнал рассогласования, который существует до момента сброса элемента 13 памяти. На выходе преобразователя 10 код - аналог появляется сигнал,, который регуляторы 9-7 и преобразователь 6 воздействует на двигатель 1. Двигатель 1 начинает разгоняться и двигаться в сторону уменьшения рас- согласования положения механизма 3
и задания, поступившего в.сумматор 12 с блока 19 задания.
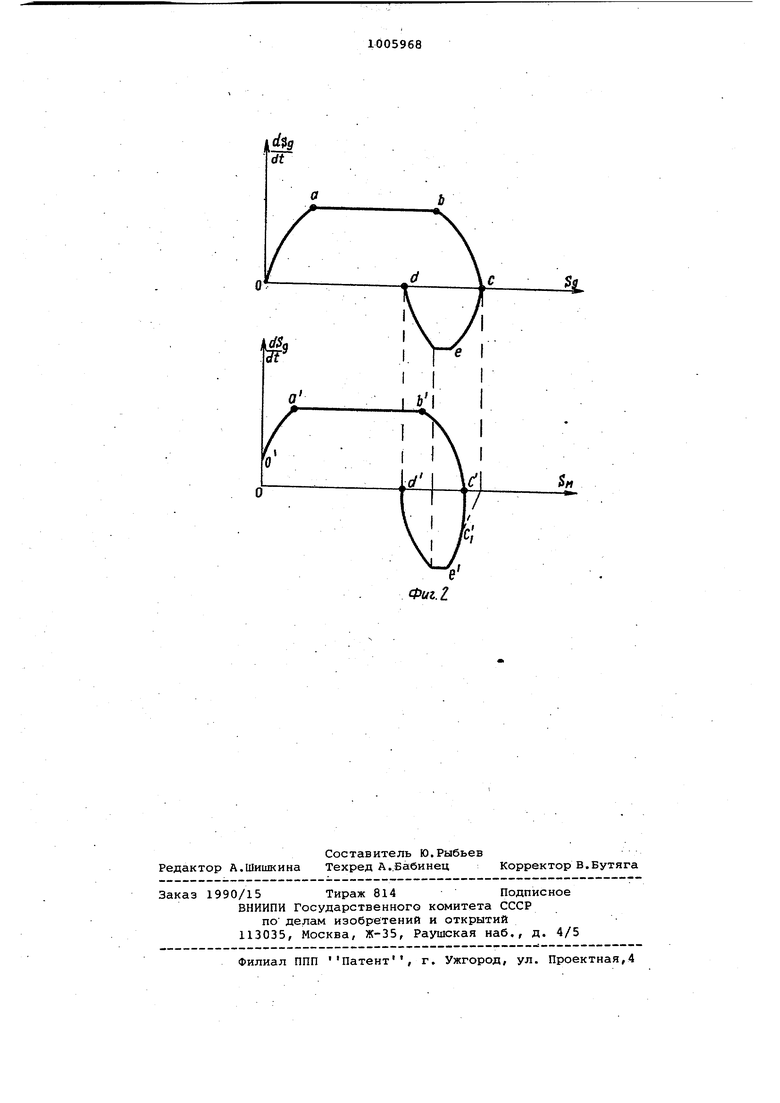
На фиг,2 показаны графики движения двигателя и механизма. Двигатель находится в позиции о, была задана новая позиция двигателя d, двигатель разгоняется на участке о-а и выходит на участок установившегося движения а-Ь.
В начале разгона двигателя 1 механизм 3 из-за наличия люфтов в
трансмиссии 2 остается неподвижным. В процессе разгона двигателя 1, когда его скорость возрастает до некоторого значения, соответствующего скорост движения механизма 3 о-о, люфты выбираются и механизм 3 начинает разгоняться на участке d -а и выходит на участок установившегося движения а -Ь.
Из-за наличия сигнала на п-ом информационном разряде остановка двигателя 1 в точке позиционирования не происходит. Однако в этой точке все информационные коды на выходе сумматора 12 равны О, так как положение механизма соответствует заданному. Это приводит к тому, что на выходе элемента ИЛИ-НЕ 17 появляется сигнал, что вызывает срабатывание элемента 14 памяти. При продолжении движения механизма 3 растет рассогласование между положением механизма 3 и заданием на блоке 19,при этом на информационных разрядах сумматора 12 возникают сигналы. Когда сигналы возникают на выбранном сочетании К-информационных разрядов (количество и вес выбираемых разрядов определяется величиной люфта в трансмиссии 2),срабатывает элемент И 18, при этом происходит сброс элементов 13 и 14памяти, что;приводит к снятию сигнала с плюсового знакового разряда и появлению сигнала на минусовом, разряде входа преобразователя 10 код - аналог. Кроме
того, на всех входных информационных . разрядах этого преобразователя код соответствует действительному рассогласованию, так как сигнал, поступающий на вход элемента ИЛИ 16 с выхода элемента 13 пгиляти исчезает, при этом двигатель 1начнет реверсироваться, его скорость изменяется на участке Ь-е (фиг.,2) , пройдя нулевое значение в точке с, механизм3
0 вначале тормозится и его скорость . изменяется от установившегося значения, до нуля на участке Ь-с, в точке с происходит остановка механизма, которая длится до тех пор, 5 пока не выбирается люфт в трансмиссии 2, при этом скорость двигателя достигает значения с-с. Далее двигатель 1 и механизм 3 движутся к точке позиционирования также, как и в известной схеме управления.
Таким образом, система обеспечивает автоматическое управление положением механизмов с автоматическим выбором люфтов в трансмиссиях между механизмом и двигателем.
Область применения изобретения металлургические механизмы, подвергающиеся силовым воздействиям в ходе технологического процесса.
Экономический эффект при внедрении устройства достигается за счет увеличения срока службы дорогостоящих трансмиссий и составляет около 10 тыс.руб, на один механизм.
| название | год | авторы | номер документа |
|---|---|---|---|
| Пневматическое устройство управления механизированным стеллажом | 1978 |
|
SU721824A1 |
| Мостовой цифроаналоговый преобразователь | 1979 |
|
SU873403A1 |
| Цифровой следящий электропривод | 1985 |
|
SU1308982A1 |
| Позиционный электропривод постоянного тока | 1986 |
|
SU1432707A1 |
| Цифровая система синхронного управления приводами | 1974 |
|
SU543115A1 |
| Мостовой цифроаналоговый преобразователь | 1985 |
|
SU1654977A1 |
| БЫСТРОДЕЙСТВУЮЩИЙ МНОГОФУНКЦИОНАЛЬНЫЙ ПРЕОБРАЗОВАТЕЛЬ УГЛА В КОД ДЛЯ УСТРОЙСТВ ЭЛЕКТРОМЕХАНОТРОНИКИ | 1994 |
|
RU2094945C1 |
| Стенд для диагностирования технического состояния транспортных средств | 1988 |
|
SU1543280A1 |
| Регулятор | 1990 |
|
SU1803906A1 |
| СИСТЕМА ПРОГРАММНОГО УПРАВЛЕНИЯ СБОРОЧНЫМ УСТРОЙСТВОМ | 1991 |
|
RU2029335C1 |
ЦИФРО-АНАЛОГОВАЯ СИСТЕМА УПРАВЛЕНИЯ ПОЛОЖЕНИЕМ МЕХАНИЗМОВ, В частности механизмов прокатных станов, содержащая электродвигатель, механически соединенный с механизмом, датчиком скорости идатчиком положения механизмов и электрически соединенный с регулируемым преобразователем напряжения, вход которого соединен с последовательно соединенным регулятором тока, регулятором скорости и регулятором положения, вход которого соединен с преобразователем код-.аналог, входы которого соединены с информационными и двумя знаковыми разрядами сумматора, входы которого соединены с датчиком и задатчиком положения механизма, о тличающаяся. тем, чго, с целью повышения надежности работы механизмов и повышения точности их установки в заданное положение, между сумматором и преобразователем код-аналог дополнительно установлен блок выбора люфтов, состоящий из двух элементов памяти, элемента И, элемента ИЛИ, элемента ИЛИ-НЕ и ключа, причем единичный вход первого элемента пеалятк соединен с плюсовым знаковым разрядом сумматора, вход сброса соединен с элементом И, а выход соединен с тремя входами с плюсовым знаковым разрядом преобразователя код - аналог, одним из входов элемента ИЛИ, другой вход ко(Л торогЬ соединен с информационным разрядом сумматора, а выход соединен С с информационным разрядом входа преобразователя код - аналог, с управлякнцим входом ключа, вход которого соединен с минусовым знаковым разрядом сумматора/ а выход с минусовым знаковым разрядом входа преобразователя код - аналог, входы элемента И соединены с выходом второго элемента памяти и с выбранным сочетанием . К-информационных разрядов сумматора,. причем единичный вход второго элемента памяти соединен с выходом элемента КЛК-ЕЕ f входы которого средиве Л со всеми информационными разрядами cy мaтopa, а вход сброса этого эле;мента памяти соединен с выходом элемента И.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОЙ КОМПЕНСАЦИИ | 0 |
|
SU360122A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| и др | |||
| Устройство унифицированной блочной системы регулирования дискретного типа ,(УБСР-Д) | |||
| Энергия, 1975, с | |||
| Разборный с внутренней печью кипятильник | 1922 |
|
SU9A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
