Изобретение относится к вакуумным координатчикам для манипулирования объектами исследований, находя1ци1МИся в высоковакуумных камерах.
Р1эвестен микроманипулятор для систем высокого вакуума, несущая платформа которого жестко связана с коаксиальными валами и коаксиальными вакуумными вводами, перпен(ДИкулярным-и плоскости платфор ы, и несет натравляющие и предметный стол.
Предлагаемый манипулятор отличается от известлых тем, что он снабжен третьим коаксиальным валом с шестерней, вводимой ноступательным перемещением в зацепление с шестерней, закрепленной на оси предметного стола, устано1вленного на .подвижной опоре, на:правляющ,ие которой жестко закреплены на раме, перемещающейся по направляющнм, перпендикулярным направляющим опоры, и жестко закреплены на несущей платформе, пли с зубчатой рейкой, входящей своим ползуном в паз опоры.
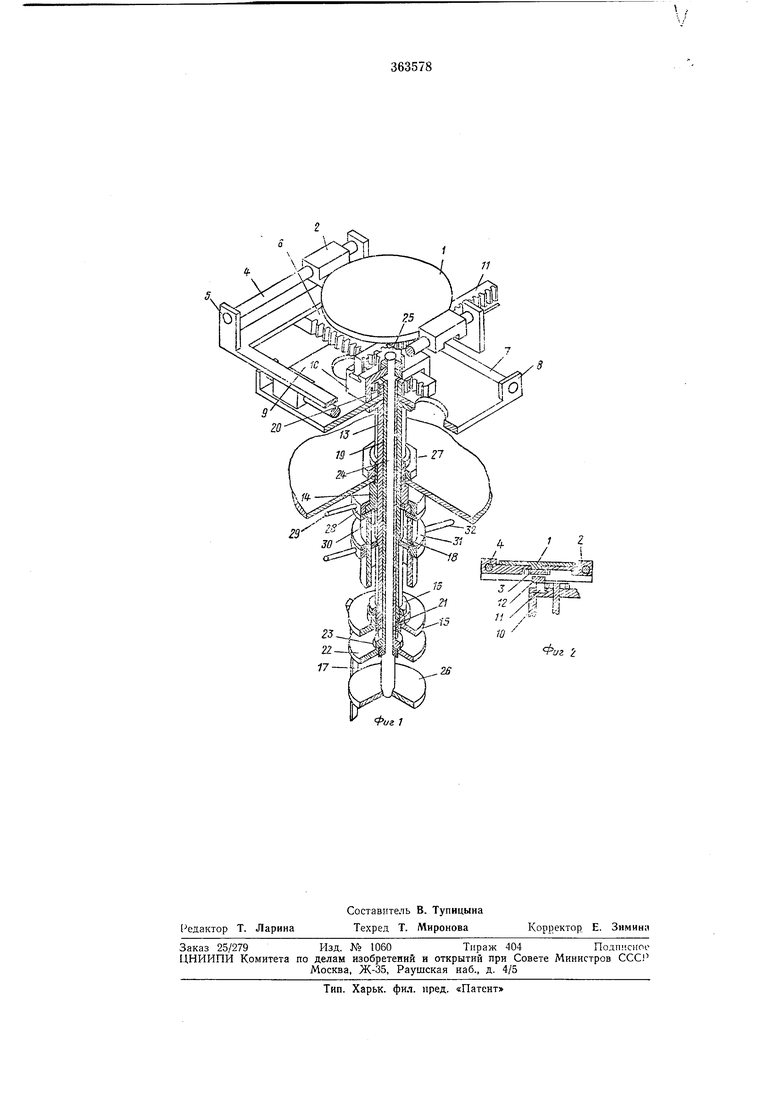
На фит. показан описьгваемый .микроманипулятор, общий Вид; на фиг. 2 - разрез по предметному столу.
Предметный стол 1 координатника размещен на верхней плоскости подвижной опоры 2. В OHiOpe имеется отверстие, в которое вставлена ось стола. К оси стола с нижней стороны опоры прикреплена шестерня 3. На нижней стороне опоры имеется паз. Сквозь отверстия на концах опоры проходят две горизонтальные направляющие 4, концы которых закреплены в подвижной раме 5. К подвижной раме л естко прлкреплена рейка 6. Сквозь отверстия в подв)1жной раме /проходят еще две горизонтальные нанравляющие 7, перпендикулярные направляющим 4. Концы наиравляюидих 7 закреплены в стойках 8, укрепленных на несущей платформе 9, к которой прикреплена скоба 10 с отверстием и пазом. В этом пазу находится хвостовик рейки //. На рейке укреплен ползун 12, входящий в паз. расположенный на нижней стороне опоры 2. В центре несущей платформы имеется отверстие, соосное отверстию в скобе. Несущая платформа закреплена на фланце первого полого вертикального вала 13, проходящего через вакуумный ввод 14, расположенный па стенке рабочей камеры. На нижний конец вала 13 павин eн диск 5, фиксируе: 1ый контргайкой 16. с прикрепленной к нему линейкой 17. На валу J3 закреплена также шайба 18 с выступами.
Внутри первого вала соосно с ним проходит второй полый вал 19, на вер.хнем конце которого укреплена шестерня 20, находянитяся в зацеплении с рейкой 6. Вал 19 про.ходит через вакуумный ввод 21 в диске 15. К нижнему концу этого вала приварен диск 22 с делениями на периферийной части. Внутр.н второго полого вала через вакуумный ввод 23, размешанный в диске 22, соосно с ним проходит третий вал 24, на верхнем конце которого укреплена шестерня 25, которая может aiaxoдиться в зацеплении либо с рейкой //, либо с шестерней 5. На нижнем конце вала 24 укреплен диск 26 с делениями на периферийной части. Ва куумный ввод 14 с резиновой прокладкой прикреплен к стенке рабочей камеры с помощью гаички 27. На выстуи ввода опирается стакан 28 с рукоятками 29. К стакану 28 прикреплен стакал 30 с двумя назами и отверстием. На наружной поверхности стакана 30 имеется резьба. На ста-кан навинчена шайба 31 с каиавкой и р чкояткамн 32, в которую входят выступы лтайбы, проходяшие через пазы стакана 30.
Вакуумные вводы М, 21 и 23 конструктивно выполнены одинаково и состоят из деталей (корпуса, нажиаиной гайки, шайбы, фторопластовой втулки, резиновой прокладки), отличающихся лишь геометрическимл размерами.
Продольными перемещениям И назовем перемещения вдоль направляющих 4, поперечными - перемещения вдоль направляющих 7 и вертикальными - перемещения вдоль оси системы коаксиальных валов 13, 19 и 24.
Внутрен1ний вал 24 может перемешаться относительно всех остальных деталей коордииатника в вертикальном направлении.
Для перемещения олоры 2, а следовательно, я стола / в продольном направлении вал 24 смещается вниз. Тем самым щестерня 25 вводится в зацепление с рейкой 11. Вращение щестерни 25 обеспечивается вращением диска 26. При этом 11 перемещается в продольном направлении, а прикрепленный к рейке ползун 12 перемещает опору 2 со столом / в том же направлении (независимо от полол ения ползуна в пазу опоры).
Поперечное .перемещение предметного стола 1 обеспечивается вращением диска 22. При этом рейка 6, находящаяся в зацеплении с ше4
стерней 20 и жестко скерплепная с подвижной рамой 5, перемещает раму, а также опору 2 и стол / в по.псречном направлен1Ии.
Вертикальное перемещение несущей платформы 9, а следовательно, и предметного стола Обеспечивается вращение.м щайбы 31.
Помимо поступательных перемещений можно осуществлять порознь вращение несущей платфордгы 9 и вращение стола /. Вращение несущей платформы 9 осуществляется вращением стакана 28. Для вращения стола / вокруг его оси вал 24 смещается вверх, и щестерня 25 вводится в зацепление с щестерней 3. После этого вращение стола 1 обеспечиваетс я вращением диока 26.
Величина продольных, поперечных и вращательных перемещений отсчитывается по делениям, нанесенным на соответствующие диски. Величины вертикальных перемещений определяются с помощью линейки 17.
Предмет изобретения
Микроманипулятор, несущая платфор/ма которого жестко связана с коаксиальными вакуумными вводами, перпендикулярными плоскости платформы, и несет направляющие, по1движную опору с зубчатой рейкой и предметный стол с щестерней, отличающийся тем, что, с целью повышения универсальности путем вьгполнения стола с дополнительными степенями свободы, он снабжен третьим коа-ксиальным валом с шестерней, вводимой поступательным перемещением в зацепление с шестерней, закрепленной на оси предметного стола, установлбнного на подвижной опоре, направляющие которой жестко закреплены на раме, перемещающейся ino направляющим, перпендикулярным направляющим опоры, и жестко закреплены на несущей платформе или с зубчатой рейкой, входящей своим ползуном в паз опоры.
.Ж
Фиг 2
Фиг J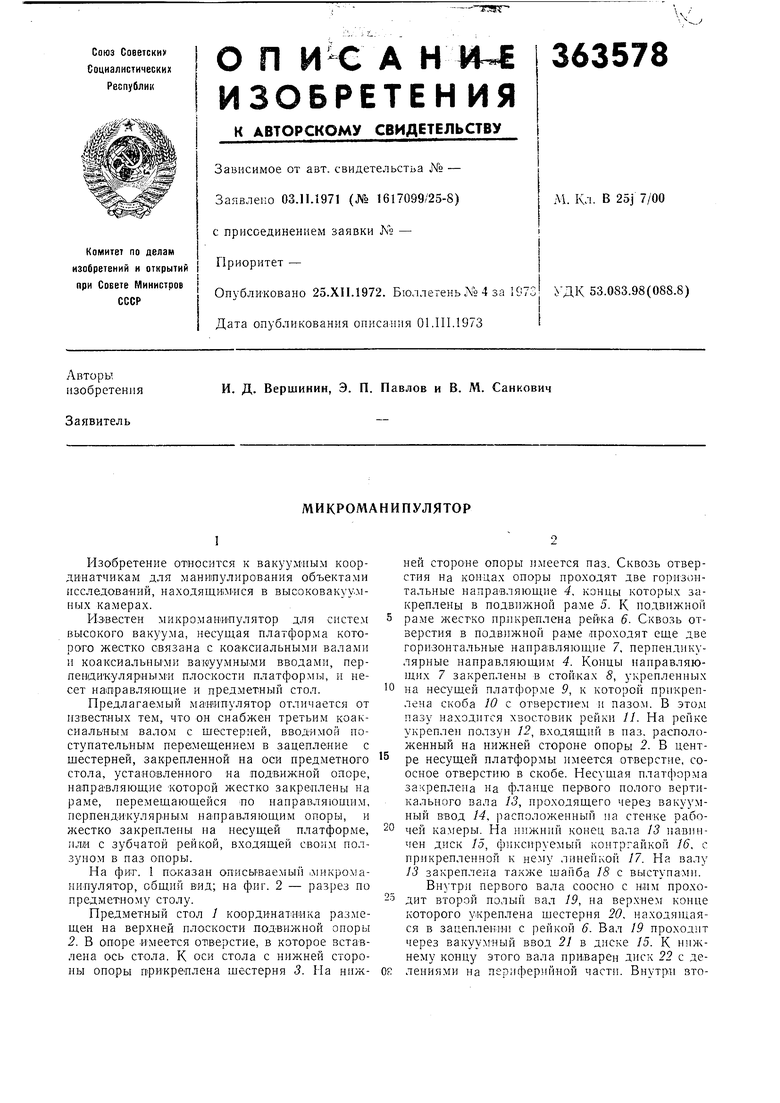
| название | год | авторы | номер документа |
|---|---|---|---|
| Микроманипулятор | 1979 |
|
SU837847A1 |
| Устройство для исследования поверхности твердого тела | 1985 |
|
SU1324079A1 |
| Машина для приготовления мазков на микроскопический анализ, например, из шелковичных бабочек | 1938 |
|
SU65556A1 |
| Револьверный суппорт | 1975 |
|
SU653033A1 |
| Вакуумный питатель | 1956 |
|
SU108941A1 |
| Устройство для вырубки изделий из резины | 1976 |
|
SU649596A1 |
| Многодвигательный привод реечного толкателя | 1978 |
|
SU787758A1 |
| Устройство для вырубки заготовок из листовых материалов | 1977 |
|
SU704814A1 |
| Устройство для вырубки изделий из резины | 1976 |
|
SU943004A1 |
| Автоматизированный комплекс для штамповки крупногабаритных деталей | 1985 |
|
SU1324725A1 |