(54) МИКРОМАНИПУЛЯТОР

| название | год | авторы | номер документа |
|---|---|---|---|
| МИКРОМАНИПУЛЯТОР | 1973 |
|
SU363578A1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ ПОЛОЖЕНИЯ ОБЪЕКТА ПО ДВУМ ВЗАИМНО ПЕРПЕНДИКУЛЯРНЫМ НАПРАВЛЕНИЯМ | 2014 |
|
RU2579781C2 |
| Устройство для исследования поверхности твердого тела | 1985 |
|
SU1324079A1 |
| Установка для прецизионных работ с микрообъектами | 1980 |
|
SU1008688A1 |
| МИКРОМАНИПУЛЯТОРЕ?СЕООЮ'^Н'*Я пйтг"'':;и..г'"'^''- ;•'•••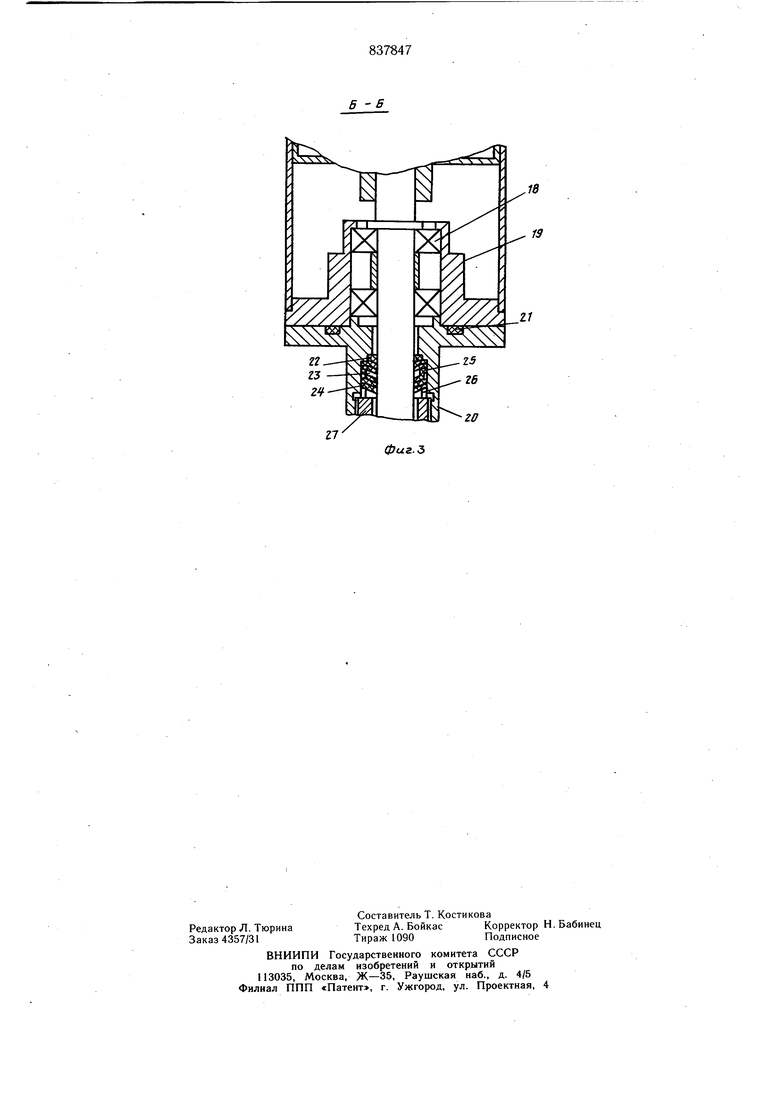
Изобретение относится к вакуумной технике, а именно к устройствам для перемещения объектов исследования в высоковакуумных камерах. Известен микромакипулятор, содержащий корпус, несущую платформу с закрепленным на ней предметным столом, направляющие и стакан с фланцем для подсоединения к вакуумной камере 1. Недостатком данного мйкроманипулятора является сложность конструкции и низкие эксплуатационные качества. Цель изобретения - устранение указанных недостатков, т.е. упрощение конструкции и повыщение эксплуатационных качеств. Цель достигается тем, что микроманипулятор снабжен двумя блоками горизонтального и вертикального перемещений предметного стола, состоящим из двигателей и сельсин-датчиков, и двумя ходовыми винтами, установленными соответственно на платформе и в стакане, причем блок горизонтального перемещения размещен внутри вакуумной камеры и кинематически связан с ходовым винтом, установленным на платформе, а блок вертикального перемещения размещен снаружи вакуумной камеры и кинематически связан с ходовым винтом, установленным в стакане. На фиг. 1 изображен микроманипулятор, продольный разрез; на фиг. 2 - разрез А-А на фиг. 1; на фиг. 3 - разрез Б-Б на фиг. 1. Микроманипулятор имеет корпус 1 и жестко связанный с ним фланец 2. В-корпусе расположен подвижный стакан 3 с фланцем, внутри которого проходит ходовой винт 4, и вакуумный ввод 5 движения. На нижнем конце ходового винта закреплена коническая щестерня 6, которая через конические щестерни 7 связана с блоком, состоящим из электродвигателя 8 и сельсиндатчика 9. На верхнем конце подвижного стакана закреплена несущая платформа 10, на которой расположены направляющие 11 с предметным столом 12, связанным с ходовым винтом 13. Ходовой винт 13 через конические щестерни 14 и 15 связан с блоком, состоящим из электродвигателя 16 и сельсин датчика 17. Вакуумный ввод 5 движения имеет, например, такую конструкцию, В корпусе 1 установлены подщипники 18, втулка 19. Неподвижный стакан 20 с уплотнением 21 установлена на нижнем конце корпуса
координатного механизма. Внутри неподвижного стакана расположены вставка 22, кольцо 23, уплотнители 24 и 25, шайба 26, гайка 27.
Устройство работает следующи.м образом.
С помощью фланца 2 герметично подсоединяется к вакуумной камере микроманипулятор. От электродвигателя 8 через конические шестерни 6 и 7 приводится во вращение ходовой винт 4, передающий вертикальное перемещение подвижному стакану 3. Стакан 3 жестко связан с несущей платформой 10, на которой находится предметный стол 12, следовательно, несущая платформа и предметный стол также перемещается вертикально. Сельсин-датчик 9 через конические щестерни 6 и 7 связан с ходовым винтом 4 и отсчитывает вертикальные перемещения объекта исследования, расположенного на предметном столе 12. От электродвигателя 16 через конические щестерни 14 и 15 приводится во вращение ходовой винт 13, передаюп ий горизонтальное перемещение предметному столу 12. Сельсин-датчик 17 через конические шестерни 14 и 15 связан с ходовым винтом 13 и отсчитывает горизонтальные перемещения . f
екта исследования, расположенного на предметном столе 12.
Формула изобретения
Микроманипулятор, содержащий несущую платформу с закрепленным на ней предметным столом, направляющие и стакан с фланцем для подсоединения к вакуумной камере, отличающийся тем, что, с целью упрощения конструкции и повыщения эксплуатационных качеств, он снабжен двумя блоками горизонтального и вертикального перемещений предметного стола, состоящими из двигателей и сельсин-датчиков, и дву.мя ходовыми винтами, установленны.ми соответственно на платфор.ме и в стакане, приче.м блок горизонтального перемещения размещен внутри вакуумной камеры и кинематически связан с ходовым винто.м, установленным на платформе, а блок вертикального перемещения размещен снаружи вакуумной камеры и кинематиче;ски связан с винтом, установленны.м в стакане.
Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР № 363578, кл. В 25 J 7/00, 1971.
л - А
fPv3.2
20
фиг. 5
