Изобретение относится к системам автоматического регулирования и может быть использовано при создании прецизи онных следящих приводов металлорежущих станков, приводов оптических телес копов, радиоантенн и др. Известны следящие системы, в которых обеспечивается высокая точность за счет компенсации люфта путем введе НИН в систему датчиков скорости р. . Из известных следящих систем наиболее близкой по технической сущности является система, содержащая последовательно соединенные измеритель рассогласования, первый формирователь сигнала управления, первый исполнитель ный механизм, первый дифференциал, редуктор, выходной вал которого соединен со входом объекта регулирования, первый выход которого соединен с одним из входов измерителя рассогласования, а выход - с первым входом первого датчика, второй вход которого через второй дат.чик угла соединен с выХОДО1 первого дифференциала, и последовательно соединенные второй формирователь сигнала управления и второй исполнительный механизм 2. I Недостатком такой системы является сравнительно невысокая точность из-за неполной компенсации влияния кинематической погрешности и люфта силового редуктора. Целью изобретения является повышение точности системы. Поставленная цель достигается тем, что в предлагаемой системе установлены фильтры, формирователь сигнала управления, исполнительные механизмы, дифференциалы и датчик скорости, вход которого соединен с выходом первогоисполнительного механизма, а выход - с первьми входами первого, второго и третьего фильтров, вторые входы которых через соответственно четвертый, пятый и шестой фильтры подключены к выходу первого датчика угла, выход первого фильтра подключен ко входу второго формирователя сигнала управления, выход второго исполнительногомеханизма через второй дифференциал соединен со вторым входом первого дифференциала, выход второго ильтра через последовательно соединенные третий формирователь сигнала управления, третий исполнительный механизм и третий дифференциал подключен ко второму входу второго дифференциала, выход третьего фильтра через последовательно соединенные четвертый Формирователь
сигнала управления и четвертый исполнительный двигатель подключен ко второму входу третьего дифференциала.
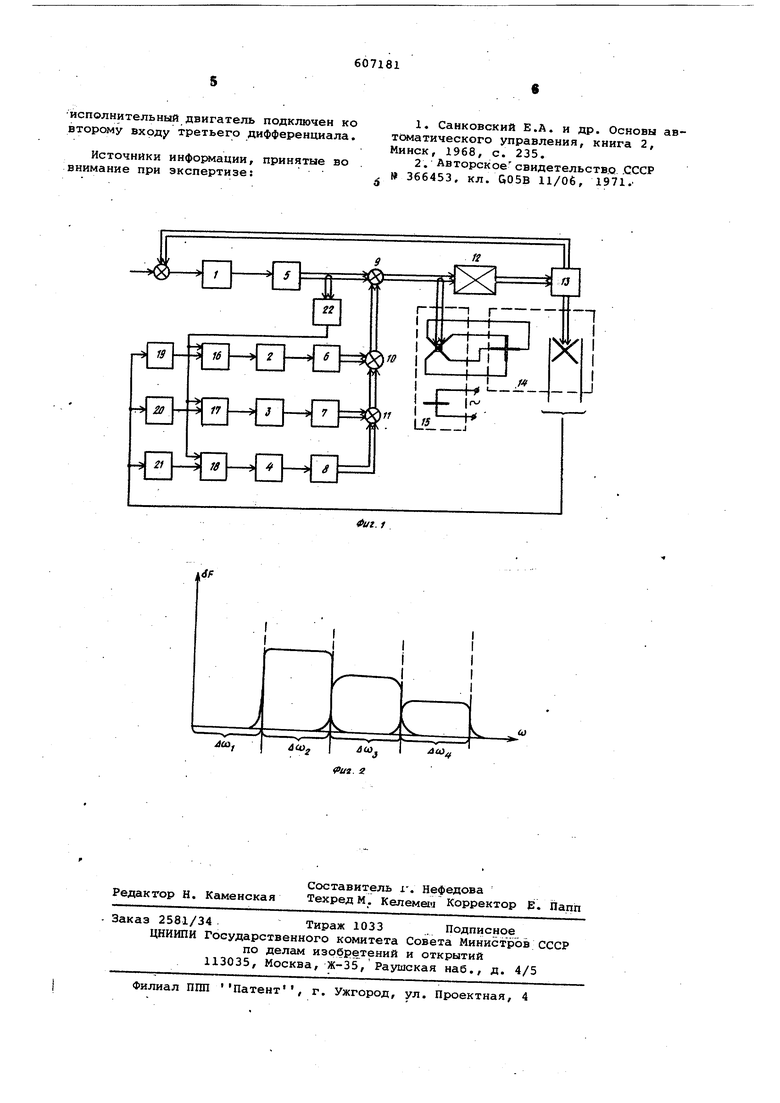
На фиг.- 1 показана блок-схема предлагаемой следящей системы;на фиг. 2 характеристики работы системы,где приняты следующие обозначения:первый,второй, третий, четвертый формирователи сигнала управления 1-4,первый, второй, Третий, червертый исполнительные механизмы 5-8, первый, второй, третий, дифференциалы 9-И, редуктор 12,объект регулирования 13, первый и второй дат- чики угла 14, 15, первый, второй, тре7
тий, четвертый, пятый, шестой фильтры
l6-21,датчик скорости 22,F - амплитуда погрешности редуктора 12, (Л}-частота погрешности, д Ш,,Д (Л, лоса частот погрешностей, отрабатываемых соответственно исполнительньми механизмами 5, 6, 7, 8.20
Система работает следующим образе.
В исходном положении нулевые отметки датчиков углов 14 и 15 совмещены. Статорная обмотка датчика угла 15 запитана от сети. Наведенное на его ро- 25 торных обмотках напряжение поступает на статорные обмотки многополюсного датчика угла, на одной из роторньрс обмоток которого в этом случае сигнал равен нулю, вследствие чего исполни- 30 тельные механизмы 6-8 неподвижны.
При появлении управляющего сигнала на входе следящей системы движение с исполнительного механизма 5 передается через дифференциал 9 и редуктор 35 12 на объект регулирования 13.
Вращение ротора датчика угла 15 вызывает поворот электромагнитного потока статорных обмоток датчика угла 14.
Ротор датчика угла 14, связанный с вы-40 ходом объекта регулирования 13, поворачивается на тот же угол (с учетом передаточного числа редуктора) плюс дополнительный угол, пропорциональный величине кинематической погрешности 45 редуктора. .Следует отметить, что при выборе многополюсного датчика угла 14 величина полюсного деления выбрана больше максимальной амплитуды ожидаемой погрешности.60
Разность между электромагнитным потоком статорных датчика угла 14, вызванного углом поворота ротора датчика угла 15, и электромагнитным потоком, вызванным углом поворота ротора датчика угла 14, в виде электрического сигнала с одной из роторных обмоток датчика угла 14 поступает на входы базовых фильтров 19, 20, 21, каждый из которых 6п1эёделяет полосу gg
рабочих частот Attig з 4 фиг. 3) исполнительных механизмов 6,7,
8, соответственно.
С выходов базовых фильтров 19,20,21 сигналы поступают соответственно на
. .оО .
выходы подстраиваемых фильтров 16,17,18,. каждый из которых упреждает фазу 1. выходного сигнала в соответствии с амплитудой выходного сигнала датчика скорости 22.Упрежденные сигналы с выходов; фильтров 16,17,18 поступают через формирователи управляющего сигнала 2,3,4 на входы исполнительных механизмов 6,7, 8 соответственно и через дифференциалы 9, 10 и 11 дрворачивают редуктор 12, уменьшая сигналС датчика угла 14.
Таким образом, в предлагаемой еле-; дящей системе полностью компенсируется неравномерность вращения редуктора в широком частотном диапазоне его кинематических погрешностей, и точность следящей системы значительно повышается , а стоимость изготовления редуктора для предлагаемой системы снижается.
Формула
изобретения
Следящая система содержащая последовательно соединенные измеритель рассогласования, первый формирователь сигнала управления, первый исполнительный механизм, первый дифференциал, .редукто выходной вал которого соединен со входом объекта регулирования, первый выход которого соединен с одним из входов измерителя рассогласования, а второй выход - с первьм входом первого датчика угла, второй вход которого через второй датчик угла соединен с выходом первого дифференциала, и последовательно соединенные второй формирователь сигнала управления и второй исполнительный механизм, отличающаяся тем, что, с целью повышения точности следящей системы, в ней установлены фильтры, формирователи сигнала управления, исполнительные механизмы, дифференциалы и датчик скОрости, вход которого соединен с выходом первого исполнительного механизма, а выход --с первыми входами первого, второго и третьего фильтров,
вторые входы которых.через соответственно четвертый, пятый и шестой фильтры подключены к выходу первого датчика угла, выход первого фильтра подключен ко входу второго формирователя сигнала управления, выход второго исполнительного механизма через второй дифференциал соединен со вторым входом первого дифференциала, выход второго фильра через последовательно соединенные третий формирователь сигнала управления, третий исполнительный механизм и третий дифференциал подключен ко второму входу второго дифференциала, выход третьего фильтра через последовательно соединенные четвертый формирователь сигнала управления и четвертый исполнительный двигатель подключен ко второму входу третьего дифференциала. Источники информации, принятые во . внимание при экспертизе: 1. Санковский Е.А. и др. Основы автоматического управления, книга 2, Минск, 1968, с. 235. 2. Авторскоесвидетельство .СССР - 366453, кл. G05B 11/06, 1971. о- 

| название | год | авторы | номер документа |
|---|---|---|---|
| Двухканальная следящая система | 1973 |
|
SU446027A1 |
| Следящий привод | 1977 |
|
SU857924A1 |
| Двухканальная следящая система | 1975 |
|
SU570880A1 |
| Двухканальный следящий привод | 1975 |
|
SU579596A1 |
| Устройство для измерения временных интервалов | 1989 |
|
SU1674030A1 |
| Двухканальная следящая система | 1974 |
|
SU503205A1 |
| Устройство для управления антенной корабельной радиолокационной станции по курсовому углу | 1974 |
|
SU1841193A1 |
| Следящий привод | 1974 |
|
SU550630A1 |
| Следящий привод | 1974 |
|
SU641393A1 |
| Двухканальный следящий привод | 1973 |
|
SU497558A1 |