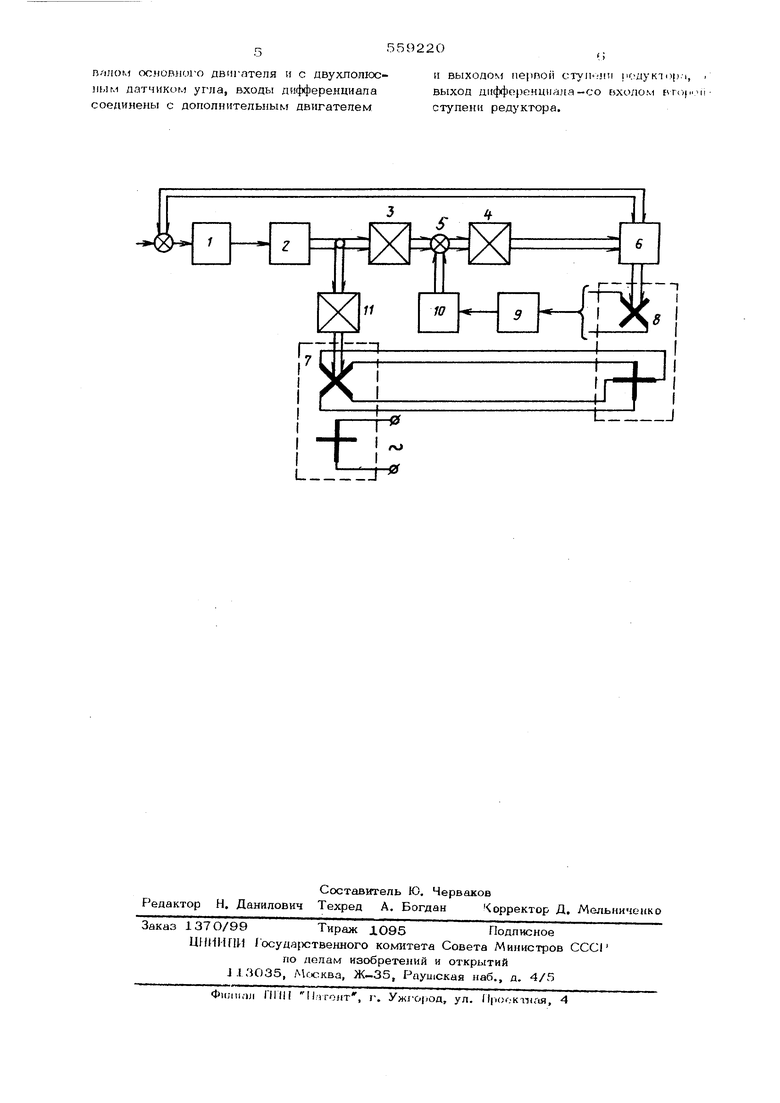
ференциала со входом второй ступени IM-,дуктора. На чертеже дана блок-схема спедяшей системы. Устройство содержит усилитель 1, основ ной двигатель 2, двухступенчатый редуктор сосах ящий усповно из двух ступеней 3 и 4, дифференциал 5, объект регулирования 6, датчик угла 7, имеющий небольшое число пар полюсов, например двухполюсный синусо-косинусный -вращающийся трансформатор (СКВТ), установленный на выходном валу многополюсной датчик угла 8, над- ример индуктосин. При этом отношение чис па пар полюсов многополюсного и малополю кого датчиков равно передаточному числу второй ступени 4 двухступенчатого редуктора, выход датчика угла 7 связан со статорнымм обмоткам:и многополюсного датчика угла 8, а выход датчика 8 подключен ко входу блока управления 9, Блок управления 9 чере--; дополнительный двигатель 10 подключен к одному из входов дифференциала. В гтредлагаемое устройство дополнитель но введен измерительный редуктор 11, соединяющий вал основного двигателя 2 с двухполюсным датчиком угла 7, При этом передаточное число измерительного редуктора 11 равно передаточному числу первой ступени 3 редуктора, выход дифференциала 5 соединен со входом второй ступени 4 редуктора, а выход первой ступени 3 ре дуктора соединен со вторым входом дифференциала. Устройство работает следующим образом. В исходном положении нулевые отметки датчиков 7 и 8 совмещены, Статорная об- мотка датчика 7 запитана от сети, Допол ннтельный двигатель 10 неподвижен. При появлении управляющего сигнала на входе следящей системы движение основного дви гателя 2 через обе ступени 3 и 4 редуктора и дифференциал 5 передается на объе регулирования 6, на датчик угла 8 и через измерительный редуктор 11 на датчик 7. Датчик угла 8, связанный с объектом регулирования, поворачивается на тот же угол ( с учетом редукции второй ступени с точностью до кинематической ошибки и угла закручивания редуктора. В результате возникает угловое рассогласование в поло жении датчиков угла 7 и 8, которое в виде электрического сигнала снимается с одной из роторных обмоток датчика 8, пос тупает в блок угч:1авления 9, затем на до полнительный двш-атепь Ю, который через ди({)ференпиал 5 и вторую ступень 4 оворачивает объект регулирования в, yNtesrt,- шая сигнал с датчика 8, При этом в отличие от известной спедяей системы в предлагаемой следяшей системе упругие деформации, возникающие в едукторе из-за воздействия дополнительного вигателя, уменьшаются первой ступенью едуктора, а затем и измерительным редукором и передаются на двухполюсный дат ик умбньшегшые в раз, где - передаочное число первой ступени редуктора и изерительного редуктора. Из-за потерь на рение в первой ступени редуктора и в измерительном редукторе воздействие дополительного двигателя на двухполюсной датчик еще более уменьшается и при больших передаточных числах первой ступени редуктора полностью устраняются. Таким образом, удается устранить ощиб ку, возникающую при воздействии дополнительного двигателя на двухполюсной датчик угла, полностью скомпенсировать кинематические погрешности и повысить эквивалентную жесткость редуктора и, следовательно, повысить точность системы. Благодаря использованию нового элемента -измерительного редуктора,уменьшается составляющая погрешности, обусловленная воздействием дополнительного двигателя на двухполюсной датчик угла, В результате будет повышена точность, что расширит сферу применения следяшей системы в народном хозяйстве. Использование предлагав емого изобретения позволит сократить трудозатраты на разработку следящих систем, близких по точностным характеристикам к предлагаемой следящей системе, что даст значительную экономию средств. Формула изобретения Следящая система, содержащая основной и дополнительный двигатели,двухступеа чатый редуктор, соединенный с объектом регулирование, дифференциал, двухполюсный датчик угла, выход которого соединен с электрическим входом установленного на выходном валу многополюсного датчика угла, например индуктосина, с числом пар полюсов, равным передаточному числу второй ступе ни редуктора, блок управления, вход . которого соединен с выходом мно- гополюсного датчика угла, о т л и ч а ю- щ а я с я тем, что, с цепью повышения точности системы, она солиржит измерительный редуктор с передаточшям числом, раь111ЛМ передаточному числу первой ступени двухступенчатого редуктора, спязанпьи с
n-ijiOM основного двигателя я с двухполюс111ЛМ датчиком угла, входы дифференциала соединены с допопнительным двигателем
II выходом 1е|1ПОЙ CTyII ;J l рОЛуК10|)-1, ,
выход дифференциала-со .М Evrofn.ii ступени редуктора.
| название | год | авторы | номер документа |
|---|---|---|---|
| СЛЕДЯЩАЯ СИСТЕМА | 1973 |
|
SU366453A1 |
| Следящая система | 1983 |
|
SU1109712A1 |
| Следящая система | 1980 |
|
SU885970A1 |
| ИНТЕГРИРУЮЩИЙ ПРИВОД | 1972 |
|
SU334556A1 |
| Устройство контроля следящей системы передачи угла | 1976 |
|
SU651398A1 |
| Устройство для контроля многополюсных вращающихся трансформаторов | 1979 |
|
SU868815A1 |
| Устройство для измерения погрешности многополюсного датчика угла | 1980 |
|
SU877723A1 |
| Преобразователь угла поворота вала в код | 1978 |
|
SU788140A1 |
| Устройство для высокоточной дистанционной передачи угла | 1977 |
|
SU739615A1 |
| Следящая система для управления гелиостатом | 1981 |
|
SU964575A1 |
tii:±. I
