1
Изобретение относится к устройствам для автоматизации процесса иаготовления деталей из проволоки и может быть применено на предприятиях, изготовляющих многократные координатные соединители автоматичеоких телефонных станций.
Иэвест1 ые ус11ройства для изготовления деталей из проволоки, напркм&р, гибкого выбнрающего пальца многократного координатного соединителя, содержащие установленные на плите механизм подачи проволоки, механизм навивки, снабженный оправкой с прямоугольным пазом, служащим для размещения проволоки, меха1низмы гибки, резки и , имеют низкую производительность.
Цель изобретения - повышение производительности работы устройства.
Для этого механизм гибки выпол1нен в виде ша(рни|рно установленного на плите рычага, снабжеиного роликом, взаимодействующим с т0рщб0(вой поверх1ностыо оправки, снабженной скосом.
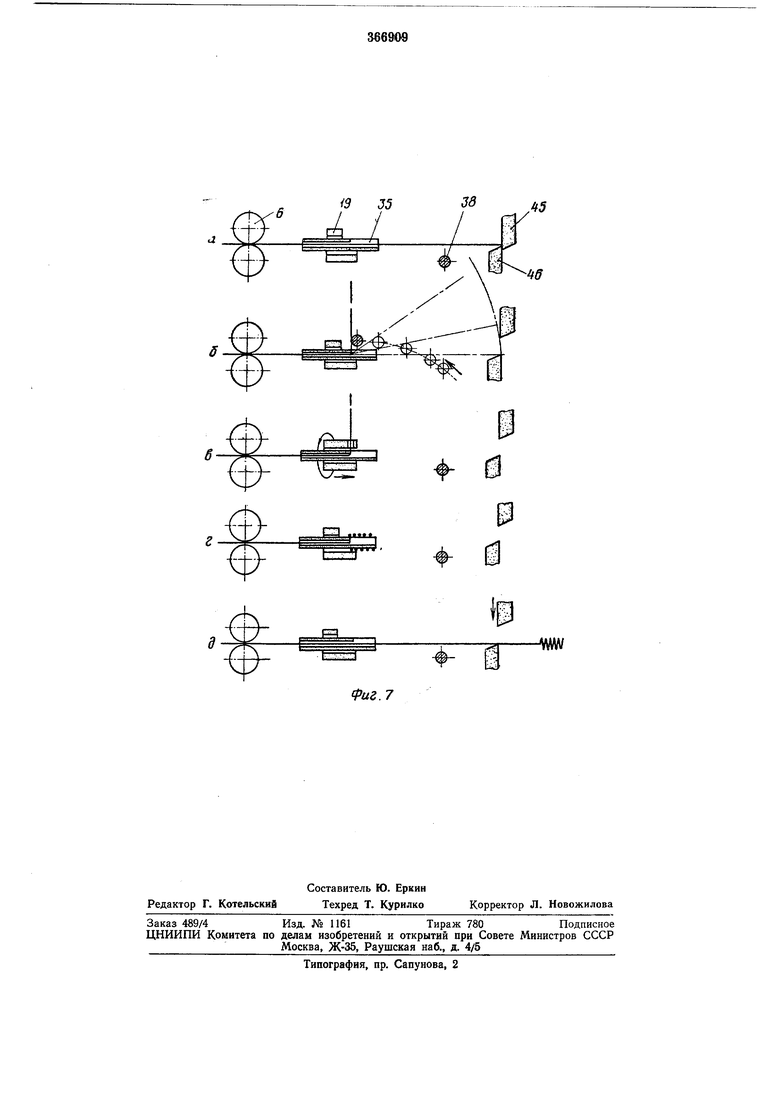
На фиг. 1 изображено предлагаемое уст|рой|йТ1Во, вид в плане; на фиг. 2 - то же, вид опереди; на фиг. 3 - сечение по А-Л на фиг. 2; на фиг. 4 -механизм гибки и поводок механизма навивки; на фиг. 5 - оправка механизма гибки; на фиг. 6 - механизм резки; на фиг. 7 схематически показан тех1нологичесюий процесс изготовления выбирающего пальца многократного координатного соединителя.
На одной стороне верхней плиты 1 стола автомата (см. фиг. 1) установлено рихтовочное устройство, включающее редуктор 2, рихтовочный механизм 3, трансмиссию 4 и подающий механизм 5.
На противОПОЛОЖ1НОЙ стороне плиты / установлен механизм 6 подачи проволоки, механизм 7 HaiBMBKH, механизм 8 ги,б;ки и механизм 9 реЗ|КИ.
Снизу к верхней плите 1 (см. фиг. 2) закреплен распределительный вал 10, кронштейн 11 крепления электродвигателя 12 привода рихтовочного механизма 5 и подающего механизма 5.
На нижней плите 13 смонтирован привод распределительного вала 10 и механизма навивки 7, состоящий из электродвигателя 14, клинаременной передачи 15, редуктора 16, цепных передач 17 и 18.
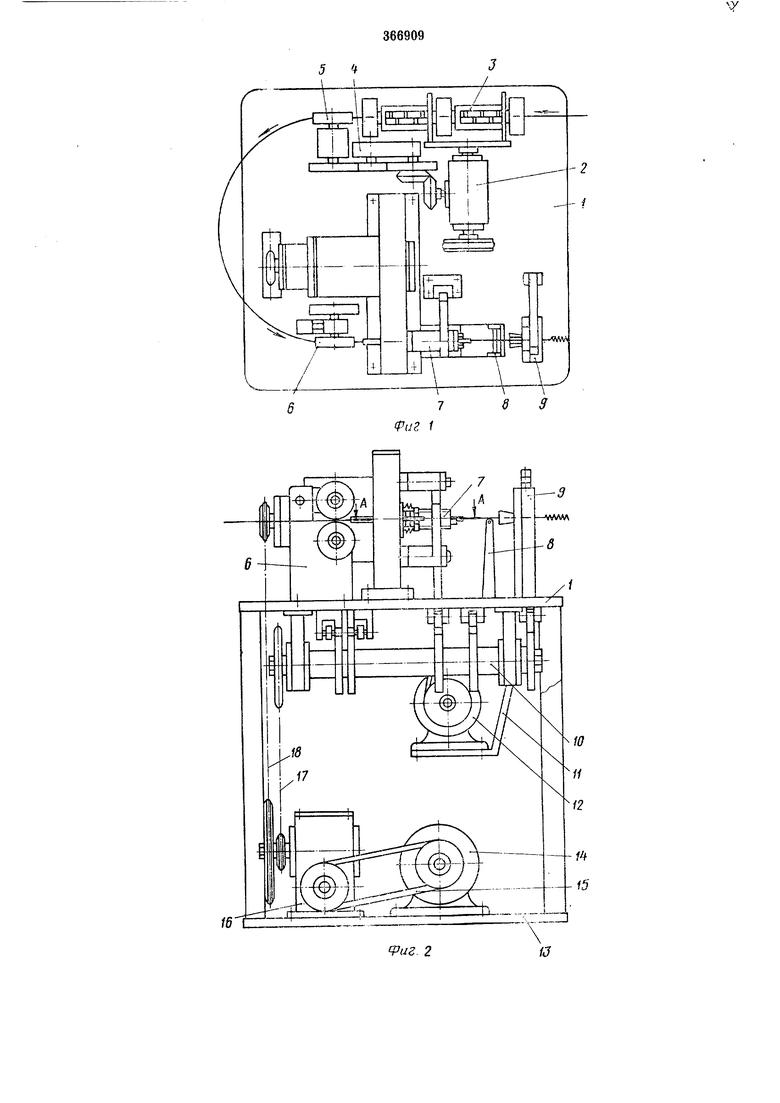
Навивающий поводок 19 (см. фиг. 3) механизм 7 навивки запрессован в гильзу 20, которая запрессованными в нее втулками 21 свободно посажена на полом валу 22 и пружинами 25 прижимается к буртику вала 22. Кроме гильзы 20, на валу 22 свободно посажена шестерня 24 с запрессованной в нее втулкой 25. Сам вал 22 запрессован в ступицу 26,
неподвижно закрепленную в расточке корпуса 27 механизма 7 навивки.
В отверстии вала 22 посажен и закреплен неподвижно удлинитель 28 со сквозным продольным отверстием. Шестерня 24 входит в зацепление с шестерней 29, которая неподвижно посажена на валу, соединяемом с ведомым валом цепной передачи 18 привода механизма 7 навивки посредством управляемой муфты фн;ксированного останова, устаиовленной в корпусе 27 механизма 7 навивки. В расточку корпуса 27 запрессовано кольцо jO с сальником 31, исключающим утечку смазки из внутренней полости корпуса 27. В диск шестерни 24 запрессованы пальцы 32, свободно входяш,ие в пазы гильзы 2Q. Ходовая резьба гильзы 20 зацепляется с резьбой нолугаек 33, закрепленных на рычагах 34, свободно посаженных на осях, запрессованных в корпус 27. В расто.ч,ке удлинителя 28 посажена и за,креплена оправка 55, ось отверстия Которой совпадает с осью отверстия удлинителя 28.
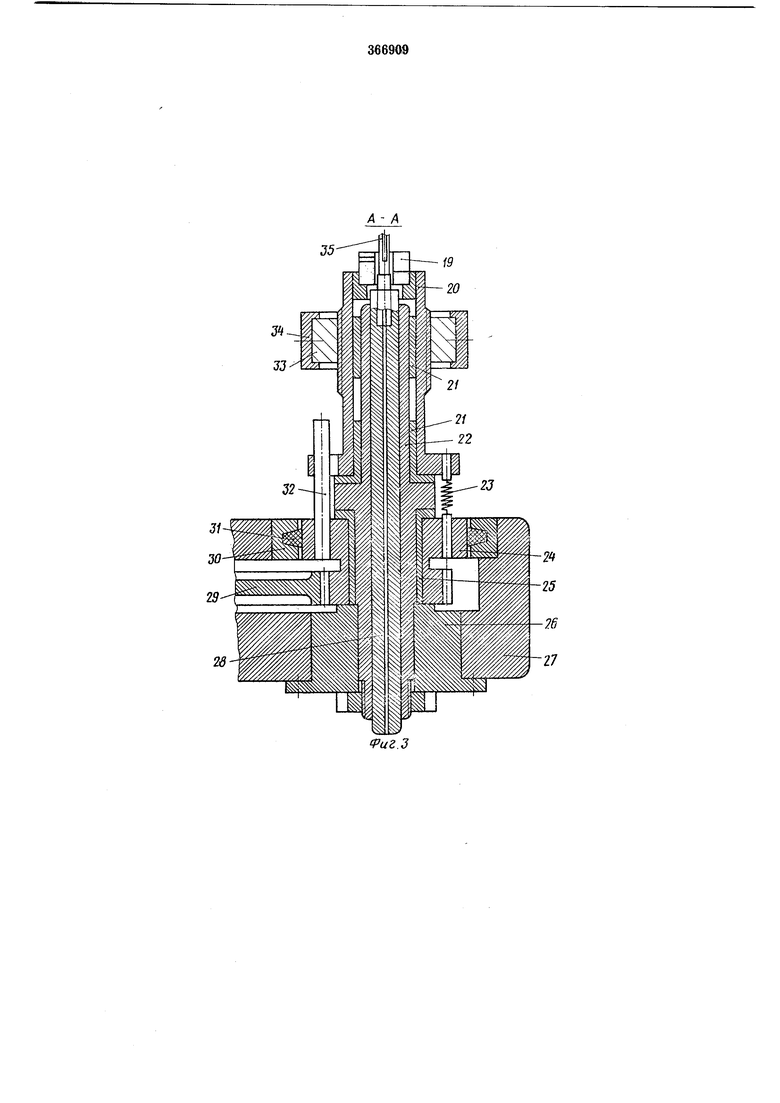
Механизм 8 гибки (см. фиг. 4) состоит на рычага 36, свободно посаженного на оси 37, закрепленной в плиге i, и. гибочного пальца ЗВ, запрессованного в отверстия ш,ек рычага об и взаимодействующего с торцовой поверхностью оправки 35.
Оправка 35 механизма 8 гибки (см. фиг. 5) состоит из корпуса 39 и вставки 40, имеющей скос с притупленной кромкой и закрепленной Б прямоугольном пазу корпуса 39 так, что вместе с этим пазом она образует отверстие.
Механизм 9 резки (см. фиг. 6) состоит из корпуса 41, направляющих 42 и 43, ориентара 44, подвижного ножа 45 и неподвижного, ножа 46.
При изготовлении из проволоки гибкого выбирающего пальца многократного координатного соединителя предлагаемое устройство работает следующим образом.
Проволока из бухты .протягивается через рихтовочный механизм 5 (см. фиг. 1) вращающимися роликамЕ подающего механизма 5. Отрихтованная проволока описывает дугу и подается роликами механизма 6 подачи в отверстие удлинителя 28.
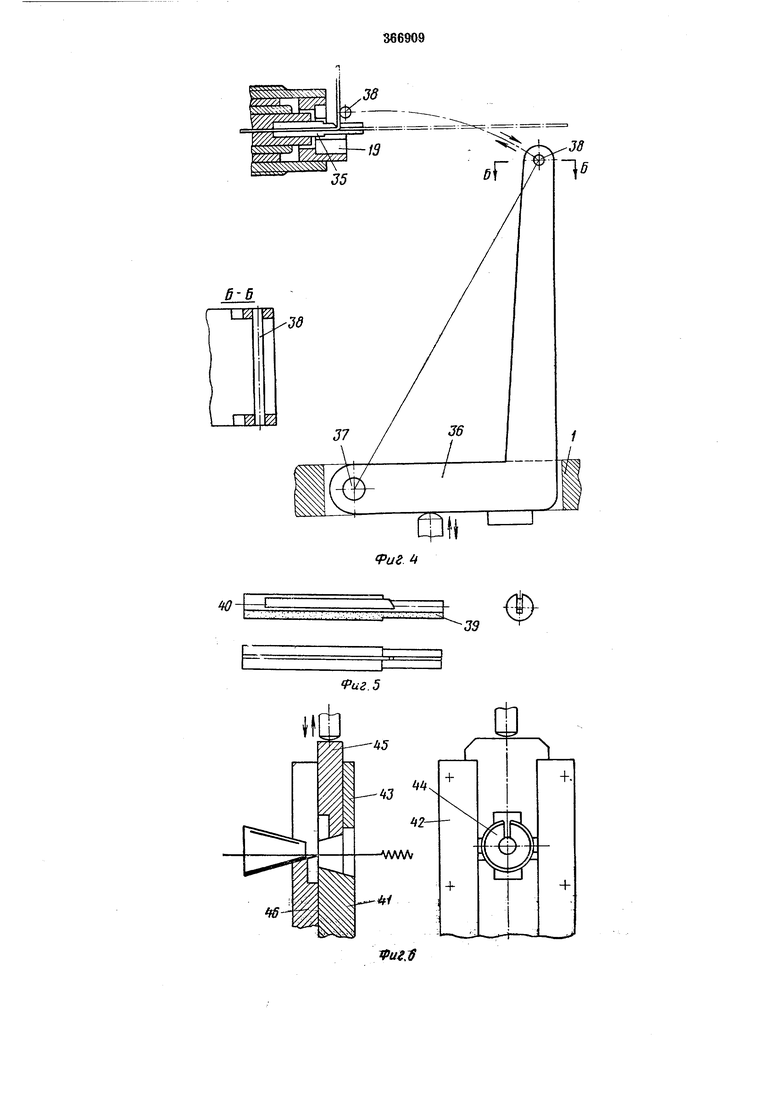
Последующие технологически е переходы иллюстрированы на фиг. 7.
Позиция а соответствует положению после срабатывания механизма 9 резки, когда его ножи 45 и 46 отрезали готовую деталь или конец проволоки при перво м цикле.
Позици1Я б соответствует наложению, когда ги.бочный палец 38 механизма 8 гибки отогнул на 90° вверх свободный конец проволоки, предназначенный для навивки пружинной части пальца. Здесь же изображены промежуточные пололсения гибочного пальца 38 и
свободного конца проволоки от начала до конца гибки. Гибка осуществляется на скосе оправки 35 1при неподвижном навивающем поводке 19.
Позиция в соответствует моменту начала навивки, пружинной части пальца. Навивающий поводок 19 повернулся уже на 90° с мо.мента .начала его вращения. Гибочный палец 38 ушел из зоны вращения и поступательного перемещения навивающего поводка 19 до включения последнего.
Позиция г соответствует окончанию навивки пружинной части пальца, когда .навивающий поводок 19 возвратился в исходное пололсение. Начинается подача проволоки роликами механизма 6 подачи на механиз1М 9 резки, при .которой сначала осуществляется съем с оправки 35 пружин.ной части .пальца, а затем эта часть проходит между разведенными ножами 45 и 46 механизма 9 резки.
Пози.ция д соответствует полож.ению перед .началом отреза готовой детали .ножами 45 и 46 механизма 9 резки.
После отреза готовой детали устройство возвращается в положение позиции а. Весь цикл повторяется сначала.
Привод на.вявающего поводка 19 механизма 7 навивки осуществляется периодически от редуктора 16 через цепную передачу 18 (см. фиг. 2) на вал шестерни 29 (см. фиг. 3), шестерню 29 и шестерню 24, от которой вращение через палец 32 сообщается гильзе 20 с навивающим пово.дком 19. Поступательное перемещение навивающего поводка 19 при нави.вке осуществляется резьбой гильзы 20 и полугаек 33 (см. фиг. 3), а при возврате в исходное положение- пружинами 23 при разомкнутых полугайках 33.
Прив.од механизма 6 подачи, механизма 8 гибки, механизма 9 резки, а также управление полугайками 55 механизма 7 навивки осуществляется кулачками распределительного вала 10.
Предмет изобретения
Устройство для изготовления деталей из проволоки, например, ги бкого. выбирающего пальца многократного координатного соединителя, содержащее установленные на плите механизм подачи проволоки, механизм навивки, снабженный опра.вкой с продольным .прямоугольным пазом, служащим для размещения проволоки, механизмы гибки, резки и .привода, отличающееся тем, что, с целью повышения производительности работы устройства, меха«из.м гибки выполнен в виде щар.нирно уста.новленного на плите рычага, снабженного роли.ко.м, взаимодействующим с торцовой поверхностью о.правки, на которой образован скос.
| название | год | авторы | номер документа |
|---|---|---|---|
| Автомат для изготовления изделий из проволоки | 1977 |
|
SU737080A1 |
| Устройство для навивки пружин с фасонными концами | 1982 |
|
SU1151348A1 |
| УСТРОЙСТВО ДЛЯ ИЗГОТОВЛЕНИЯ ПРУЖИН С ДВУХСТОРОННЕЙ НАВИВКОЙ И ИЗГИБОМ В СРЕДНЕЙ ЧАСТИ | 2001 |
|
RU2197356C1 |
| СПОСОБ НАВИВКИ ПРУЖИН С ФИГУРНЫМИ КОНЦАМИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1999 |
|
RU2147964C1 |
| Автомат для изготовления двухветвевых пружин | 1973 |
|
SU484036A1 |
| Автомат для изготовления изделий из проволоки | 1986 |
|
SU1389917A2 |
| Автомат для изготовления изделий из проволоки с образованием петли | 1975 |
|
SU575164A1 |
| УНИВЕРСАЛЬНО-ГИБОЧНЫЙ АВТОМАТ | 1991 |
|
RU2030945C1 |
| Автомат для изготовления пружин кручения | 1976 |
|
SU580934A1 |
| Автомат для изготовления проволочных граблин | 1980 |
|
SU925493A1 |
VuZ. 2
35
19
4S
-mi
