1
Изобретение относится к технологии и автоматизации свободной ковки на прессах, работающих совместно с ковочными манипуляторами.
Известна блок-схема управления перемещением ковочного манипулятора, содержащая счетчик перемещений тележки и счетчик перемещений хобота, несущего обрабатываемую бойками поковку, электрически связанные с пусковым устройством.
Цель изобретения - обеспечить получение заданной длины обрабатываемой ступени поковки с учетом ее удлинения в процессе обжатия.
Это достигается тем, что устройство снабжено встроенными последовательно в цепь между счетчиками и пусковым устройством блоком сравнения и суммирующим узлом, содержащим суммирующий блок, показывающий удлинение поковки в результате обжатия, блок, учитывающий двустороннее удлине ие поковки, блок, суммирующий удлинение поковки от хода к ходу пресса, арифметический блок, складывающий величину нервоначальной длины поковки и величину, полученную в последнем блоке, а также блок, показывающий расстояние начала обрабатываемого участка поковки до бойков. При этом суммирующий блок подключен к выходам счетчиков перемещения тележки и хобота, выход его связан с входом блока умножения, выход которого связан с блоком, суммирующим все удл П1ен1 я поковки, выход последнего - со Е.ХОДОМ арифметического блока. Блок, регистрирующий расстояние от начала обрабатываемой поковки до бойков, подключен к выходам счетчиков. Выходы носледпего блока и арифметического подключены к входам блока сравнения, выход которо0го связан со входом пускового устройства.
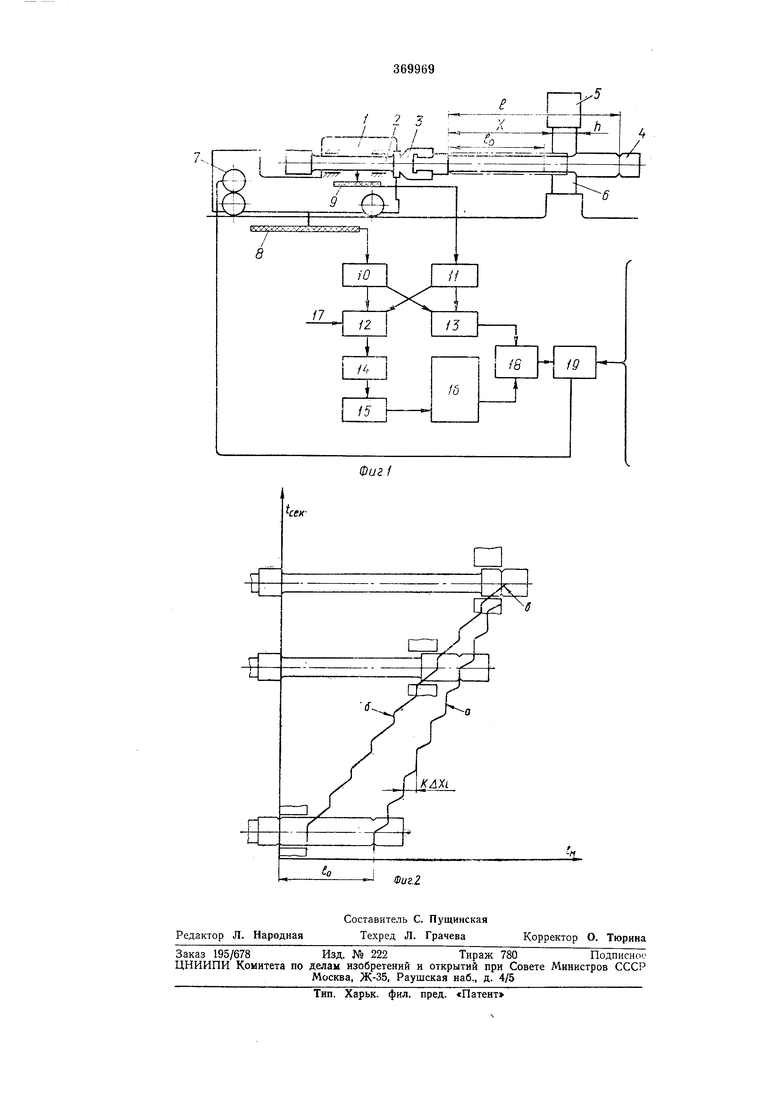
На фиг. 1 показана предлагаемая блоксхема; на фиг. 2 - график, поясняющий работу схемы управления.
Тележка / манипулятора несет хобот 2, в клещах 3 которого размещена поковка 4, об5рабатываемая бойкамн 5 } 6 гидравлического пресса, снабженными прг.водом 7 перемещения.
На тележке установлены датчик 5, измеряющий перемещение тележки манипулятора по отнощению к прессу, и датчик 5, измеряющий перемещение хобота мапипулятора по отношени.ю к его тележке. Датчик 8 соедтшен электрически со счетным блоком 10, преоб5разующим полу1аемую информацию в число, соответствующее положеиию тележки. Датчик 9 аналогичным образом соединен с блоком 11, который вырабатывает число, соответствующее положеиию хобота.
0
Блоки W и 11 электрически соединены с
суммирующим узлом, содержащим блоки 12-16. Суммирующий блок 12 включается з работу посредством линии 17 только во время обжатия поковки и производит алгебраическое сложение величин перемещения тележки и хобота за время очередного рабочего хода ЛХь. Блок 13 производит непрерывное сложение чисел, вырабатываемых блоками 10 и 11, и выдает число, показывающее, на каком расстоянии находится начало обрабатываемого участка поковки от бойков пресса X. Число, вырабатываемое блоком 12, соответствующее удлинению участка поковки между клещами и бойками пресса в результате обжатия поковки, передается в блок 14, где умножается на коэффициент К, учитывающий удлинение поковки в обе стороны от бойков.
Из опытных данных К. 1,8-2,07. Полученная величина суммируется от хода к ходу пресса в блоке и передается в арифметический блок 16, где прибавляется к первоначальной длине проковываемого участка /j. Блок 16 вырабатывает число, соответствующее текущему значению расстояния конца обрабатываемого участка от его начала /.
Величины, полученные в блоках 13 и 16, поступают в блок сравнения 18, который отключает привод тележки манипулятора, воздействуя на пусковое устройство 19, как только величины, полученные в блоке 13 и 16. окажутся равными.
Работу блок-схемы можно проследить па следующем примере.
С помощью манипулятора поковку устанавливает так, чтобы начало проковываемого участка (левым краем) находилось против кромки бойка 6. Начальная длппа участка /о и ширина бойка вводятся в блоки 16 и 18. После этого гидропресс и манипулятор включаются в работу с заданным обжатием и подачей. Управление синхронной работой пресса и манипулятора осуществляется известной системой управления или вручную.
Во время рабочего хода пресса хобот манипулятора 2 отодвигается от бойков за счет удлинения деформируемого участка поковки, а тележка неподвижна или совершает тормозной путь. Разность в показаниях датчиков 8 и 9 равна удлинению поковкп между клещами и бойками пресса. Эта величина вычисляется блоком 12, умнол ается на коэффициент К в блоке 14, суммируется от хода к ходу в блоке 15 и нрибавляется к исходной длине участка в блоке 16. Получае.мая таким образом текущая длина участка / непрерывпо сравнивается с перемещением поковки X
в блоке 18 с учетом ширины бойка -j- . Когда
величииы эти становятся равными, перемещение поковки прекращается. На графике линия а изображает изменение длины поковки, линия б - перемещение манипулятора, а точка их пересечения в- место остановки манипулятора.
Предмет изобретения
Блох-схема управления перемещением ковочного манипулятора, содержащая счетчик перемещений тележки и счетчик перемещений хобота, несущего обрабатываемую бойками поковку, электрически связанные с пусковым устройством, отличающаяся тем, что,
с целью обеспечения нолучения заданной длины обрабатываемой ступени поковки с учетом ее удлинения в процессе обжатия, оно снабжено встроенными последовательно в цень между счетчиками и пусковым устройством блоком, сравнения и су.ммирующим узлом, содержащи.м суммирующий блок, показывающий удлинение ноковки в результате обжатия, блок, учитывающий двустороннее удлинение поковки, блок, суммирующий удлинение поковки от хода к ходу пресса, арифметический блок, складывающий величину первоначальной длины поковки и величину, полученную в последнем блоке, а также блок, показывающий расстояние начала обрабатываемого участка поковки до бойков, при этом суммирующий блок подключен к выходам счетчиков перемещения тележки и хобота, выход его связан со входом блока умножения, выход которого связан с блоком, суммирующим удлинение поковки, выход последнего - с входом арифметического блока, а блок, регистрирующий расстояние начала обрабатываемой поковки до бойков, подключен к выходам счетчиков, выходы последнего блока
и арифметического подключены к входам блока сравнения, выход которого связан с входом пускового устройства.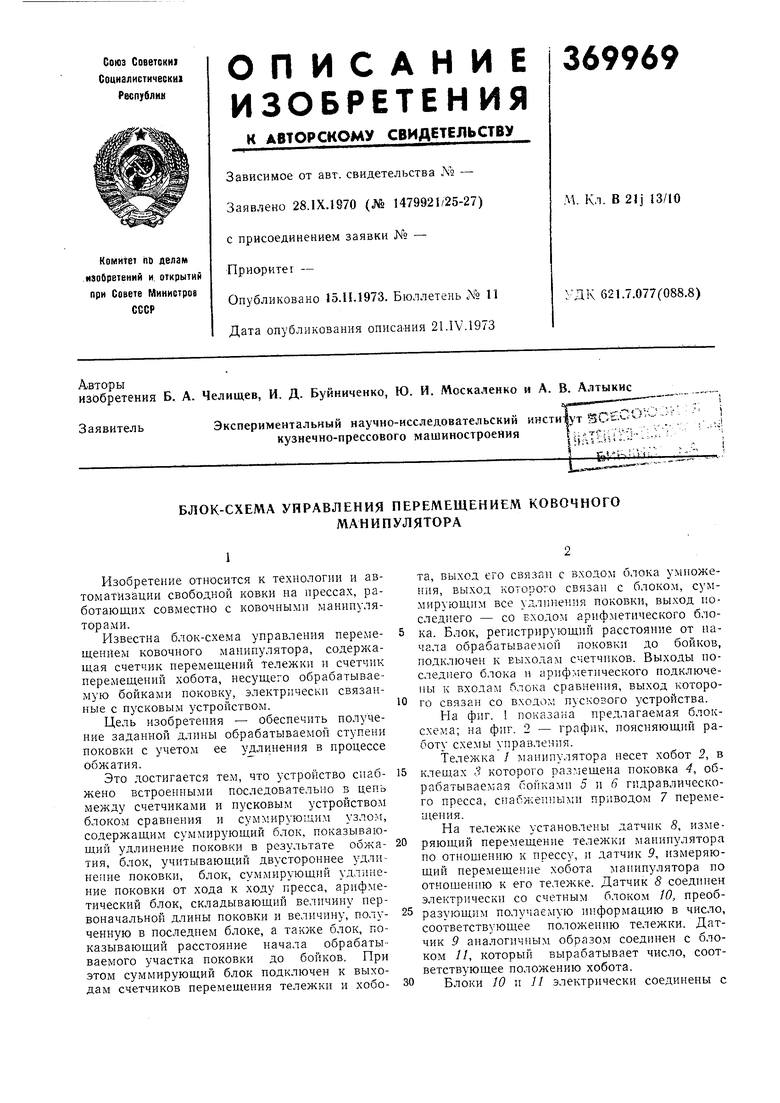
| название | год | авторы | номер документа |
|---|---|---|---|
| Передняя подвеска хобота ковочногоМАНипуляТОРА | 1979 |
|
SU816656A1 |
| Способ управления работой ковочного агрегата | 1980 |
|
SU946774A1 |
| Способ управления ковочным манипулятором | 1978 |
|
SU724267A1 |
| Устройство для управления ковочным комплексом | 1987 |
|
SU1511139A1 |
| СПОСОБ УПРАВЛЕНИЯ КОВОЧНЫМ АГРЕГАТОМ | 1973 |
|
SU365200A1 |
| Устройство для управления ковочным комплексом | 1989 |
|
SU1685751A1 |
| КОВОЧНЫЙ МАНИПУЛЯТОРbrtSJi/iOV ЕКА | 1971 |
|
SU321316A1 |
| УСТРОЙСТВО ДЛЯ КОВКИ ПОКОВОК КОЛЕЦ | 1992 |
|
RU2009758C1 |
| Механизм вращения хобота ковочного манипулятора | 1982 |
|
SU1038052A1 |
| Механизм изменения высоты подъема хобота ковочного манипулятора | 1981 |
|
SU979012A1 |