Изобретение относится к области обработки металлов давлением с использованием манипуляторов.
Известен ковочный манипулятор, содержащий приводную тележку с расположенным на ее раме хоботом, закрепленным на передней и задней подвесках, соединепных гибким звеном, связанным с механизмом вертикального перемещения хобота, имеющим привод с пусковым механизмом, и систему управления.
Цель изобретения - автоматизация подъема и опускания заготовки на боек пресса. Достигается это тем, что манинулятор снабжен смонтированным в гибком звене датчиком, регистрирующим нагрузки на переднюю подвеску, связанным с логическим устройством, встроенным в систему управления, соединенным с нусковым устройством привода механизма вертикального перемещения хобота и с предусмотренным на нрессе распределительным устройством.
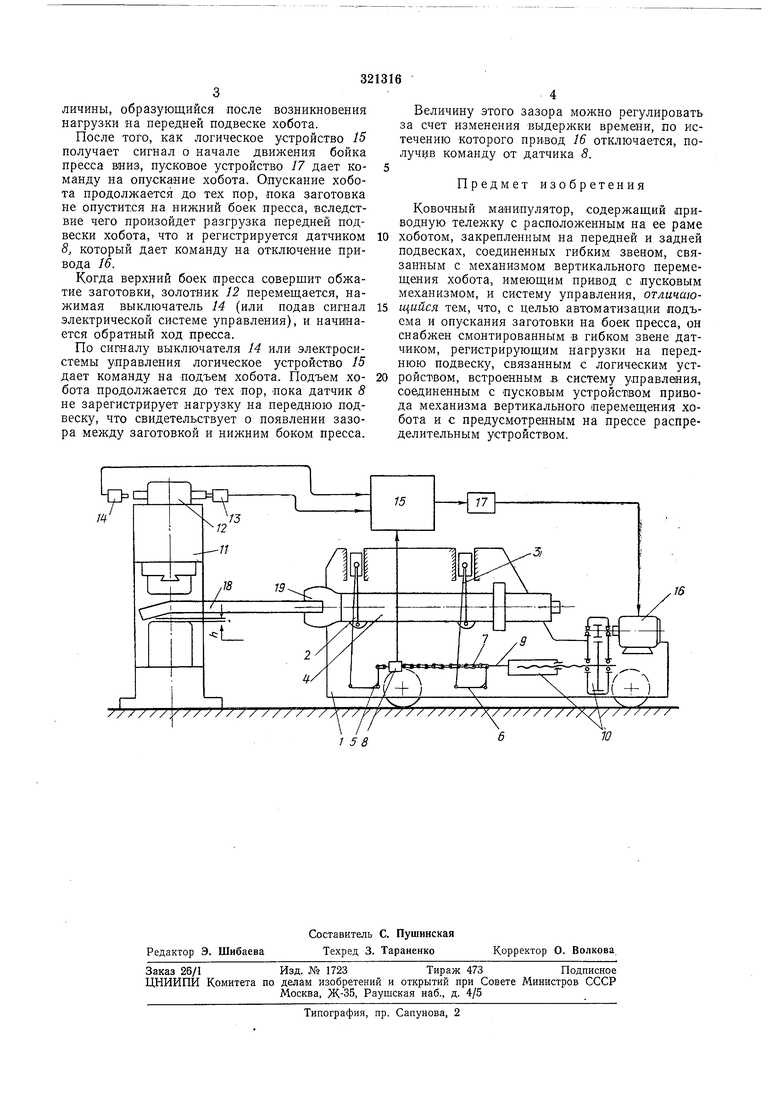
На чертеже представлен предлагаемый манипулятор.
На тележке 1 манинулятора с помощью подвесок 2 ъ 3 закреплен хобот 4, ось которого горизонтальна.
нюю подвеску. Подвески соединены тягой 9 с механизмом 10 вертикального перемещепия хобота.
На гидравлическом прессе У./ предусмотрен
золотник 12 с установленными на нем переключателямн 13 и 14, которые соед1Н-1ены с логическим устройством 15. Вместо выключателей может быть использована электрическая система управления золотником пресса.
Привод 16 механизма вертикального перемещения хобота управляется пусковым механизмом 17.
Заготовка 18 зажата в клещах 19 хобота. Манипулятор работает следующим образом.
В исходном положении между заготовкой
18 и нижним бойком пресса имеется зазор Л.
Если передняя подвеска хобота нагружена
(между заготовкой и нижним бойком пресса
имеется зазор), а верхний боек нресса опускается, привод вертикального перемещения хобота получает команду на опускание заготовки; опускание продолжается до тех пор, пока передняя подвеска не разгрузится.
Если передняя подвеска хобота разгружена
(заготовка лежит на пижнем бойке), а верхний боек пресса поднимается, привод вертикальпого перемещения хобота получает команду на подъем хобота; подъем продолжается до тех пор, пока между заготовкой и нижним
личины, образующийся после возникновения нагрузки на передней подвеске хобота.
После того, как логическое устройство 15 получает сигнал о начале движения бойка пресса вниз, пусковое устройство 17 дает команду на опускание хобота. Опускание хобота продолжается до тех пор, пока заготовка не опустится на нижний боек пресса, вследствие чего произойдет разгрузка передней подвески хобота, что и регистрируется датчиком 8, который дает команду на отключение привода 16.
Когда верхний боек пресса совершит обжатие заготовки, золотник 12 перемещается, нажимая выключатель 14 (или подав сигнал электрической системе управления), и начинается обратный ход пресса.
По сигналу выключателя 14 или электросистемы управления логическое устройство 15 дает команду на подъем хобота. Подъем хобота продолжается до тех пор, пока датчик 5 не зарегистрирует нагрузку на переднюю подвеску, что свидетельствует о появлении зазора между заготовкой и нижним боком пресса. / / ////у/////////////л//
Величину этого зазора можно регулировать за счет изменения выдержки времени, по истечению которого привод 16 отключается, получив команду от датчика 8.
Предмет изобретения
Ковочный манипулятор, содержащий приводную тележку с расположенным на ее раме
хоботом, закрепленным на передней и задней подвесках, соединенных гибким звеном, связанным с механизмом вертикального перемещения хобота, имеющим привод с пусковым механизмом, и систему управления, отличающийся тем, что, с целью автоматизации подъема и опускания заготовки на боек пресса, он снабжен смонтированным в гибком звене датчиком, регистрирующим нагрузки на переднюю подвеску, связанным с логическим устройством, встроенным в систему управления, соединенным с пусковым устройством привода механизма вертикального перемещения хобота и с предусмотренным на прессе распределительным устройством. ////// / / / / ///// )/ ///////
| название | год | авторы | номер документа |
|---|---|---|---|
| КОВОЧНЫЙ МАНИПУЛЯТОР | 1969 |
|
SU236207A1 |
| Манипулятор | 1979 |
|
SU812412A1 |
| СПОСОБ УПРАВЛЕНИЯ КОВОЧНЫМ АГРЕГАТОМ | 1973 |
|
SU365200A1 |
| КОВОЧНЫЙ МАНИПУЛЯТОР | 1969 |
|
SU250642A1 |
| Ковочный агрегат | 1978 |
|
SU810353A1 |
| Способ управления работой ковочного агрегата | 1980 |
|
SU946774A1 |
| Кузнечный манипулятор | 1955 |
|
SU114651A1 |
| Подвесной ковочный манипулятор | 1979 |
|
SU977095A1 |
| Манипулятор к прессу | 1979 |
|
SU835585A1 |
| Устройство для автоматической укладки поковки на боек | 1976 |
|
SU576152A1 |
