Изобретение относится к вспомогательному оборудованию кузнечнопрессового производства, а именно к работе комплекса манипуляторпресс.
Известен способ управления работой ковочного агрегата, включающий периодическое | аздельиое перемещение тележки манипулятора и хобота с зажа той заготовкой относительно пресса в зависимости от хода бойка пресса путем разгона тележки и хобота после обжатия, торможения и принудительного останова хобота перед обжатием и торможения тележки в период обжатия, а также согласование цикла пресса со временем подачи заготовки в процессе ковки l.
Недостатком известного способа управления работой ковочного агрегата является невысокая его производительность, так как при последовательных
обжатиях заготовки по длине с использованием наперед заданной средней скорости движения тележки не отвечает оптимальному ведению процесса в
J различных режимах ковки и требует дополнительной корректировки. К недостатку также относится и невысокая точность подачи заготовки на боек пресса, которая обусловлена с одной стороны тем, что подачу осуществляют с торможением хобота после прохождения тележкой заданного шага подачи, а с другой - тем, что торможение организуется без учета скоts рости перемещения тележки и при
таком торможении величина тормозного пути составляет ошибку подачи заготовки, уменьшение которой за счет повышения интенсивности торможения
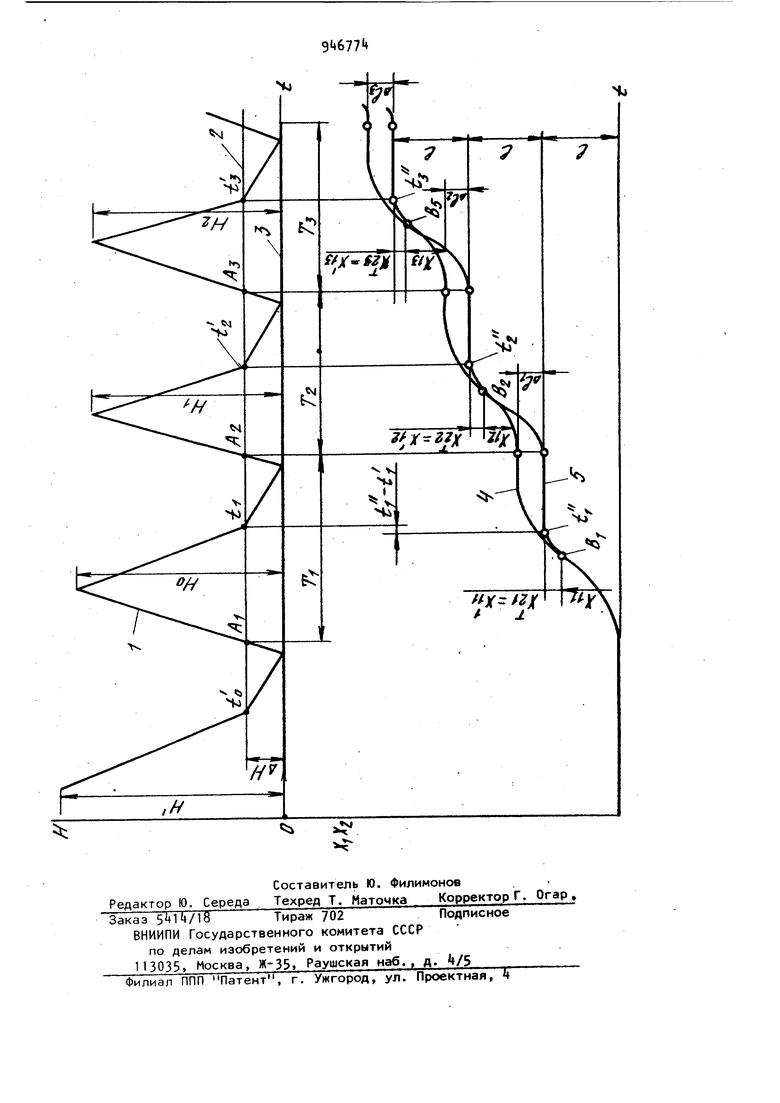
20 невозможно из-за возникновения недопустимо -больших динамических напряжений в конструкции механизмов перемещения и останова хобота. 3 Цель изобретения - устранение указанных выше недостатков. Поставленная цель достигается тем, что в способе управления работой ковочного агрегата, включающем периодическое раздельное перемещение тележки манипулятора и хобота с зажатой заготовкой относительно пресса в зависимости от хода бойка пресса путем разгона тележки и хобота после обжатия, торможения и принудительного останова хобота перед обжатием и торможения тележки в период обжатия, а также согласование цикла пресса со временем подачи заготовки в процессе ковки, перемещение заготовки осуществляют с постоянными по величине ускорениями и замедлениями, при этом торможение хобота начинают до завершения перемещения заготовку на заданный шаг подачи на расстоянии, равном его тормозному пути, определяемому в процессе подачи по текущей величине скорости тележки, а согласование цикла пресса и време ни подачи при очередных обжатиях пр изводят путем корректировки высоты подъема бойка пресса на величину, ределяемую его холостым ходом за вр мя рассогласования момента останова хобота и начала обжатия заготовки, измеренное в предшествующем цикле работы агрегата. На чертеже изображен график,отражающий зависимости перемещений подвижного бойка пресса, тележки и хобота манипулятора от времени. Линия 1 - перемещение подвижного бойка пресса; линия 2 - поверхность ис.ходной заготовки; линия 3 граница глубины Деформирования заготовки; линия k - перемещение тележки; линия 5 - перемещение хобота манипулятора. Перед началом ковки пресс и манипулятор с зажатой в хоботе заготовко устанавливают в исходное положение, при котором верхний боек пресса поднят на некоторую высоту Н, обеспечи вающую проведение в рабочей зоне пресса необходимых манипуляций по размещению заготовки над зеркалом нижнего бойка, тележка манипулятора расположена от пресса на расстоянии, соответствующем месту приложения пер вого обжатия по длине заготовки, а хобот находится в положении равновесия относительно тележки манипулятора. По предлагаемому способу взаимосвязанное движение исполнительных механизмов пресса и манипулятора для реализации ковки последовательными обжатиями по длине заготовки организуют после окончания первого обжатия. При подъеме верхнего бойка пресса в моменты отпускания поковки, обозначенные точками А:, где , 2, 3 порядковые номера циклов синхронной работы пресса и манипулятора, измеряют величину отклонения хобота от положения равновесия Д1 , и начинают перемещение заготовки на заданный шаг подачи путем разгона хобота и тележки с постоянным по величине ускорением, при этом текущую скорость тележки в Каждом i -ом цикле подачи постоянно контролируют. В процессе первого взаимосвязанного с работой пресса перемещения заготовки, хобот находясь в положении равновесия до начала торможения разгоняется и движется со скоростью, равной скорости телеу ки. В манипуляторах двойного движения с раздельным перемещением хобота и тележки подаче заготовки на заданный при шаг, хобот к моменту начала торможения перед очередным обжатием достигает положения равновесия на тележке и движется с ее скоростью. В связи с этим тормозной путь хобота ,- при его останове с постоянным по величине замедлением всегда определяется текущей скоростью тележки манипулятора, что, в свою очередь, путем выбора начала торможения хобота в момент, при котором его расчетный тормозной путь равен остатку пути перемещения тележки на заданный шаг, обеспечивает необходимую точность подачи заготовки. При останове хобота, т.е. завершении перемещения заготовки на заданный шаг, производят ее обжатие и тормозят тележку манипулятора. которая обгоняя хобот проходит расстояние, равное ее тормозному пути ЛЦ- , по окончании обжатия производят следующую подачу заготовки. Временное распределение команд для реализации синхронных движений исполнительных механизмов пресса и манипулятора в процессе ковки находим из аналитических соотношений. связывающих их конструктивные параметры. Так, например, при равнозамедленном торможении хобота, величину тормозного i-OM цикле работы агрегата находим по формуле Xjl , где К - для,каждого конкретного тип размера манипулятора характеризует параметры не)анизма торможения хобо та, а V.J..i определяется величиной подачи и скоростными возможностями манипулятора. Торможение начинают в момент, при котором выполняется следующее соотношение, представленное в общем виде для i-ro цикла синхронной работ ковочного агрегата ,Т, -N-i-e- i-r i.-, где остаток пути перемещения тележки манипулятора до завершения заданного шага подачи; вели чина отклонения хобота от положения равновесия, измеряемое в моменты А,-, соответствующие началу разгона хобот и тележки; Х i - измеряемая величина пути, пройденная тележкой с начала е разгона при подаче на заданный шаг. Торможение тележки манипулятора начи нают в момент завершения подачи поковки на заданный шаг, т.е. 0 или Х.1 . При подаче заготов ки из исходного положения, т.е. когд необходимые команды подаются при выполнении следующих уело l, При следующих подачах хобот и тележк разгоняют таким образом, что к начал торможения хобот догоняет тележку и .движется в положении равновесия относительно тележки со скоростью, равной ее скорости. Выбор в каждом цикле работы агрегата момента начала торможения хобота с учетом .величины его тормозного пути, как функции текущей скорости тележки манипулятора, обеспечивает высокую точность подачи заготовки не зависимо от воздействия всевозмож ных дестабилизирующих факторов и меняющихся условий работы ковочного агрегата. Повышение производительности ковк достигается сокращением непроизводительного времени работы ковочного агрегата путем изменения высоты подъ 46 ема подвижного бойка пресса в соответствии со временем рассогласования момента останова хобота t и момента При реализации начала обжатия совместного управления пресса и .манипулятора рабочая высота подъема бойка пресса Нд для первого цикла пресса расчитывается исходя из скоростных, конструктивно определенных, параметров пресса и манипулятора, а именно - из предполагаемого времени подачи заготовки на заданный шаг и скорости возвратно-поступательного движения подвижного бойка пресса по формуле Нп--лМ + ° скорость подъема бойка пресгде Vg скорость опускания бойка пресса; расчетное время подачи заготовки. При разгоне и торможении хобота с постоянными и равными по абсолютной величине ускорении Са ) и замедлении (а ), т.е. (а )(а )(а) расчетное время подачи находим а при постоянных и неравных по абсолютной величине ускорении и замедлении (С1р)(ат) расчетное время находим . Время tg при расчете высоты подъема бойка пресса для первого шага подачи берется большим tp, с учетом влияния возможных разбросов скоростных параметров манипулятора и скоростей холостого хода пресса. В ,последующих циклах работы ковочногб агрегата первоначально выбранная высота подъема корректируется исходя из реального времени подачи и холостого хода бойков Пресса по- следующей формуле (..) где H;,-J - высота подъема бойка пресса в предшествующем цикле. Таким образом, в течение нескольких циклов устанавливается, а затем постоянно поддерживается оптимальный
no времени режим ROBKH, когда период между обжатиями - время холостого хода соответствует времени подами заготовки на заданный шаг.
По сравнению с известным предлагаемый способ позволяет повысить производительность процесса и точность подачи заготовки в рабочую зону пресса.
Формула изобретения
Способ управления работой ковочного агрегата, включающий периодическое раздельное перемещение тележки манипулятора и хобота с зажатой заготовкой относительно пресса в зависимости от хода бойка пресса путем разгона тележки и хобота после обжатия, торможения и принудительного останова хобота перед обжатием и торможения тележки в период обжатия, а также согласование цикла пресса со временем подачи заготовки в процессе ковки, о т л и ч а ю щ и.и с я тем, что, с целью повы.шения прюизводительности и точности подачи, nepieмeщeниe заготовки осуществляют с постоянными по величине
ускорениями и замедпениями, при этом торможение хобота начинают до завершения перемещения заготовки на заданный шаг подачи на расстоянии, равном его тормозному пути, определяемому в процессе подачи по текущей величине скорости тележки, а согласование цикла пресса и времени подачи лри очередных обжатиях производят путем корректировки высоты подъема
бойка пресса на величину, определяемую его холостым ходом за время рассогласования момента останова хобота и начала обжатия заготовки, измеренное в предшествующем цикле работы
агрегата.
Источники информации, принятые .во внимание при экспертизе
1. Авторское свидетельство СССР № 365200, кл. В 21 J 13/10, 19.68 (прототип).

| название | год | авторы | номер документа |
|---|---|---|---|
| Способ управления ковочным манипулятором | 1978 |
|
SU724267A1 |
| СПОСОБ УПРАВЛЕНИЯ КОВОЧНЫМ АГРЕГАТОМ | 1973 |
|
SU365200A1 |
| БЛОК-СХЕМА УПРАВЛЕНИЯ ПЕРЕМЕЩЕНИЕМ КОВОЧНОГО | 1973 |
|
SU369969A1 |
| Устройство осевого перемещения хобота ковочного манипулятора | 1976 |
|
SU1038051A1 |
| Привод продольного перемещения тележки и хобота ковочного манипулятора | 1980 |
|
SU946775A1 |
| Передняя подвеска хобота ковочногоМАНипуляТОРА | 1979 |
|
SU816656A1 |
| СПОСОБ ИЗГОТОВЛЕНИЯ ВИТЫХ ТРУБ ТИПА "КОНФУЗОР-ДИФФУЗОР" | 2013 |
|
RU2542865C2 |
| Привод продольного перемещения хобота ковочного манипулятора | 1981 |
|
SU997945A1 |
| Подвесной ковочный манипулятор | 1979 |
|
SU977095A1 |
| СПОСОБ РАДИАЛЬНОЙ КОВКИ | 2015 |
|
RU2602586C2 |