Изобретение откосится /к вспомогательному оборудованию кузнечно-ирессового производства, а именно к способам управления ковочными манипуляторами.
Известен способ управления ковочным манипулятором При ковке заготовок на прессе последовательными обжатиями, включающий непрерывное перемещение тележки манипулятора с регулируемой скоростью и осевое перемещение хобота на шаг подачи в период между обжатиями, про:изводимое с последовательными ускорением путем разгона и замедлением путем торможения 1.
Недостатком известного способа является невысокая производительность работы из-за невысокой точности отработки шага подачи к рабочему инструменту пресса и невысокой синхронизации перемещений тележки и хобота.
Целью .изобретения является повышение производительности за счет повышения тоЧНости отработки шага подачи к рабочему инструменту пресса и улучшение условий синхронизации перемещений тележки и хобота.
С этой целью торможение хобота при его осевом перемещении производят с постоянным замедлением, равным по величине ускорению на участке разгона хобота.
при этом торможение начинают после прохождения хоботом относительно пресса расстояния, равного половине шага подачи, и заканчивают в момент остановки хобота, а регулирование скорости перемещения тележ.ки манипулятора осуществляют в зависимости от фактической продолжительности цикла ковки во время остановки хобота, при этом скорость .перемещения тележки междз обжатиями поддерживают постоянной.
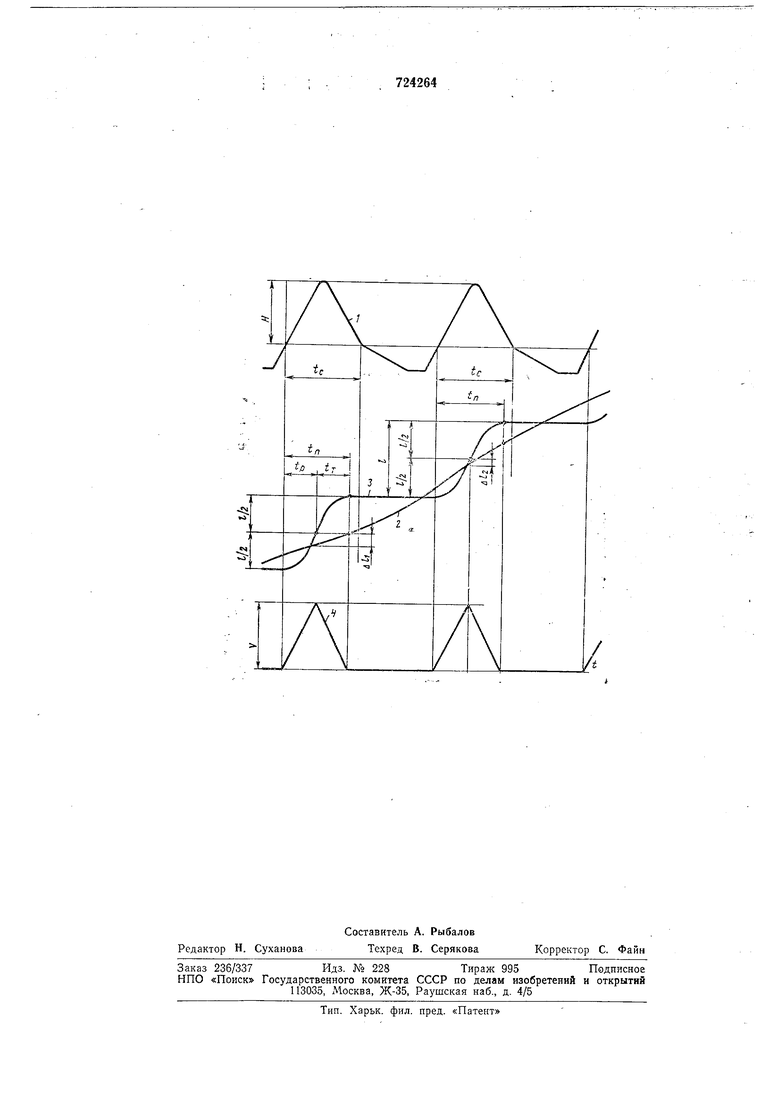
На чертеже приведена циклограмма, где линия / показывает путь бойка пресса, линия 2 - перемещение тележки манипуля5тора, линия 3 - осевое перемещение хобота с заготовкой, линия 4 - скорость хобота относительно неподвижного основания.
В первом ковочном цикле тележка манипулятора перемещается с постоянной ско0ростью, соответствующей расчетному времени ковочного цикла и заданному шагу подачи заготовки. хобота начинается при подъеме подвижного бойка пресса после обжатия, когда освобождается прост5ранство для осевого перемещения заготовки. По сигналу начала движения, например, от датчика высоты подъема бойка пресса хобот с заготовкой перемещают с постоянным ускорением а. Одновременно с
0 помощью известных устройств (дифференциала, сумматора перемещения тележки и относительного смещения хобота и т. п.) измеряется расстояние, пройдеииое хоботом с момента начала разгона относительно Неподвижного осно.вания. В тот момент, когда это расстояние становится равным 112, т. е. половине заданного шага подачи /, paBHoycKopeiHHoe движение, хобота сменяетсй торможением. Таким образом, абсолютная скорость хобота в момент начала торможения V al, а время разгона составит /р 1///а. Торможение хобота производят с ло.ст0|янным замедлением, равным по величине ускорению в период разгона, так, что абсолютная скорость хобота стаиоелтся ра,ВНой нзлю при прохождении хоботом с начала движения расстояния -у + .-,-, время торможения t-, а, а суммарное время перемещения иа величину подачи составляет п т р 2|///а. После остановки хобота в абсолютном движении и, следовательно, точНой обработки заданного щага подачи торможения за:КаНЧИвается и происходит обжатие заготовки бойками пресса. Время дикла пресса, как правило, регулируется либо высотой подъема бойка, либо выстоем бойка ,в верхием положении. Для синхронной работы пресса и .механизма осевой лодачи поковки необходимо, чтобы время с от начала разгона хобота до момента начала обжатия заготовки было не меньше времени t,, осевой подачи заготовки. Поскольку время /„ не зависит от скорости тележ.ки, величина 4, а следовательно (лри известных скоростных параметрах холостого хода бойка лресса), и высота подъема бойка над уровнем заготовки могут быть заранее рассчитаны, что упрощает синхронизацию движений механизмов пресса и манипулятора. Вышеизложенное -справедливо, если скорость тележки во время осевого перемещения хобота постоянна, в противном случае возможно нарушение отработки Шага подачи вследствие влияния ускорения тележки на абсолютное перемещение хобота. Поэтому скорость тележки -регулируют в соответствии с временем ковочного цикла (изменяющимся в зависимости от толщины заготовки, ее темлератзры и т. д.) только во время остановки хобота. Регулирование скорости тележки, необходимое для предотвращения чрезмерного отклонения хобота от Среднего положения относительно тележки, может производиться, например, по отклонению А/ь Д/2 и т. д. хобота от среднего положения в момент начала торможения лутем сведения указанного отклонения к Минимуму. Описанный способ управления ковочным манипулятором позволяет повысить его производительность. Формула изобретения Способ управления .ковочным манипулятором при ковке заготовок на прессе последовательными обжатиями, включающий непрерывное перемещение тележки манипулятора с регулируемой скоростью и осевое перемещение хобота на шаг подачи в лериод 1.между обжатиями, производимое с последовательными ускорением путем разгона и замедлением путем торможения, о тл .и ч а ю щ и и с я те.м, что, с целью повышения производительности за счет повышения точности отработки шага подачи к рабочему инструменту пресса и злучшения условий синхронизации перемещений тележки и хобота, торможение хобота при его осевом перемещении производят с постоянным замедлением, равным по величине ускорению .на участке разгона хобота, при этом торможение начинают после прохождения хобЪтом относительно пресса расстояния, равного половине шага подачи, и заканчивают в момент остановки хобота, а регулирование скорости перемещения тележки манипулятора осуществляют в зависимости от фактической лродоллагтельности цикла ковки iBO время остановки хобота, лри этом скорость перемещения тележки между обжатиЯМИ поддерживают постоянной. /Источник информации, принятый во внимание при экспертизе: 1. Патент Великобритании № 1073226, кл. В 3 Н, 1972.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ управления работой ковочного агрегата | 1980 |
|
SU946774A1 |
| СПОСОБ УПРАВЛЕНИЯ КОВОЧНЫМ АГРЕГАТОМ | 1973 |
|
SU365200A1 |
| Привод продольного перемещения хобота ковочного манипулятора | 1981 |
|
SU997945A1 |
| Привод продольного перемещения тележки и хобота ковочного манипулятора | 1980 |
|
SU946775A1 |
| БЛОК-СХЕМА УПРАВЛЕНИЯ ПЕРЕМЕЩЕНИЕМ КОВОЧНОГО | 1973 |
|
SU369969A1 |
| КОВОЧНЫЙ МАНИПУЛЯТОР | 1969 |
|
SU236207A1 |
| Устройство осевого перемещения хобота ковочного манипулятора | 1976 |
|
SU1038051A1 |
| Устройство осевого перемещения хобота ковочного манипулятора | 1971 |
|
SU682317A1 |
| СПОСОБ ИЗГОТОВЛЕНИЯ ПОКОВОК С МЕЛКОЗЕРНИСТОЙ СТРУКТУРОЙ | 2011 |
|
RU2474484C1 |
| Устройство для управления ковочным комплексом | 1987 |
|
SU1511139A1 |