Изобретение относится к машиностроению, в частности к конструкциям оборудования обработки металлов дав- лением. и может быть использовано в устройствах управления ковочными кои- плексами
Цель изобретения - повышение производительности ковки за счет авто матической установки оптимальной величины возвратного хода бойка пресса.
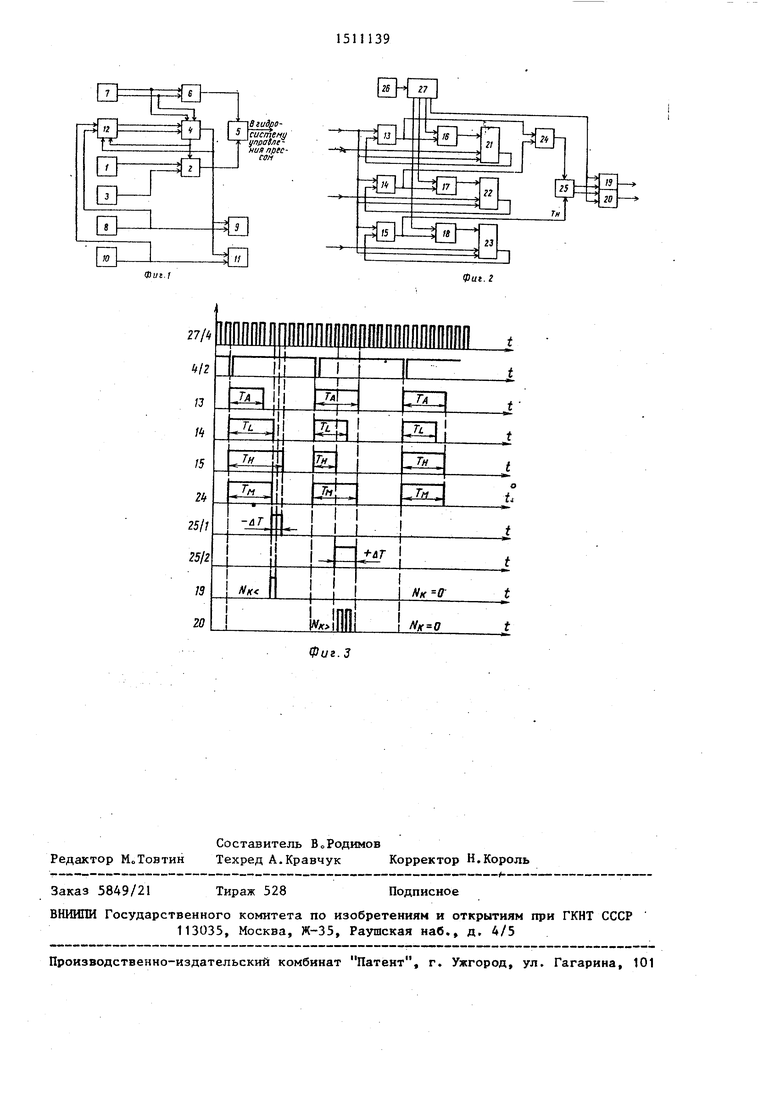
На фиг.1 представлена схема устройства; на фиг.2 - схема блока автоматической подстройки величины возвратного хода бойка пресса; на фиг.3- временная диаграмма его работы.
Устройство содержит задатчик 1 размера ковки, выход которого соединен с первым входом сумматора 2, второй вход которого подключен к переключателю 3 перебега возвратного хода бойка пресса, третий вход соединен с первым выходом блока 4 установки величины возвратного хода бойка пресса, а выход соединен с вторым входом блока 5 сравнения, выход, которого подключен
СО
со
к гидросистеме управления прессом, а первый вход соединен с выходом реверсивного счетчика 6, оба входа которого, а также первый и второй входы блока 4 ус гановки величины возвратного хода бойка пресса, соединены с выходами блока 7 считывания текущих координат, задатчик 8 поворота клещей манипулятора, выход которого соединен с вторым входом блока 9 управления приводом вращения клещей манипулятора, задатчик 10 осевого перемещения клещей манипулятора, выход которого соединен с вторым входом блока П Управления приводом осевого перемещения клещей манипулятора, первый вход которого, а также первый вход блока 9 управления приводом вращения клещей манипулятора соединен с .вторым выходом блока 4 установки величины возвратного хода бойка пресса, блок 12 автоматической подстройки величины возвратного хода бойка пресса,первый и второй входы которого соединены с выходами задатчика 8 поворота и за- датчика 10 осевого перемещения клещей манипулятора, третий и четвертый входы соединены соответственно с первым и вторым выходами блока 4 установ ки величины возвратного хода бойка пресса. Первый и второй выходы блока 12 автоматической подстройки величины обратного хода бойка пресса соединены с третьим и четвертым входами блока 4 установки величины обратного хода бойка пресса.
Блок 12 автоматической подстройки величины обратного хода бойка пресса содержит триггеры 13-15, ключи 16 - 20, счетчики 21 - 23 с предустановом, схему ИЛИ 24, схему 25 сравнения, генератор 26 импульсов и делитель 27 частоты.
Устройство работает следующим об- разом
В блоке 5 сравнения постоянно производится сравнение в двоичном коде величины текущего положения бойка пресса, снимаемой с реверсивного счет чика 6, подсчитьшающего число импульсов, поступающих с блока 7 считывания текущих координат, с величиной, определяемой сумматором 2, как сумму размера ко вки, задаваемого с помощью задатчика 1 размера ковки,величины перебега бойка пресса при воз вратном ходе, устанавливаемой переключателем 3 перебега возвратного хода бойка пресса при вводе в эксплуатацию и величины возвратного хода бойка, определяемой блоком 4 установки величины возвратного хода бойка пресса. Величины возвратного хода бойка пресса определяется как удвоенное значение величины обжатия поковки, измеряемой блоком 4 установки величины возвратного хода бойка пресса с момента начала обжатия поковки до момента нижнего реверса бойка. Момент начала обжатия поковки определяется остановкой бойка при соприкосновении его с поковкой, а конец обжатия фиксируется сигналом нижнего реверса, получаемым при смене информации на выходах блока 7 считывания текущих координат Сигнал нижнего реверса используется также для пуска приводов координатных перемещений манипулятора на заданное задат- чиками 8 и 10 величины. Вычисленное значение величины обратного хода.бойка пресса с блока 4 установки величины обратного хода бойка.пресса поступает в блок 12 автоматической подстройки величины обратного хода бой- йа пресса на вход предустановки счетчика 23. Величина задания с задатчика 8 поворота клещей манипулятора поступает на вход предустановки счетчика 21 о Величина задания с задатчика 10 осевого перемещения клещей манипулятора поступает на вход предустановки счетчика 22. По сигналу нижнего реверса, поступающего с блока 4 установки величины возвратного хода бойка пресса.на входы записи счетчиков 21 - 23, производится запись в эти счетчики соответствующих величин и срабатывание триггеров 13 - 15, выходы которых открывают ключи 16 - 18 для прохождения импульсов с делителя частоты 27 на вычитающие входы счетчиков 21 - 23„ После считывания информации с выходов переноса счетчиков 21-23 поступают импульсы, устанавливающие триггеры 13 - 15 в исходное состояние, которые закрывают ключи 16-18.
Дальнейшая работа блока автоматической подстройки величины возвратного хода бойка пресса поясняется временной диаграммой.
Импульсы, получаемые на выходах триггеров 13 - 15, образуют длительности, равные ТА, TL, ТН, соответствующие временам пересчета записан515
ных в счетчиках величин. Схемой ИЛИ 24 выделяется импульс наибольшей длительности ТМ, соответствующей максимальной величине перемещения одного из координатных перемещений манипулятора, который схемой 25 сравнения сравнивается с импульсом длительност ТН, соответствующей измеренной вели,- чине обратного хода бойка пресса.
Разность длительностей импульсов -4Т или ЛТ поступает на вход ключа 1 или ключа 20 соответственное За врем открытия ключа 19 или 20 с делителя частоты 27 проходит определенное число импульсов N ; или N 1 на корректирующие входы блока 4 установки величины обратного хода бойка пресса, обеспечивая тем самым установку необходимой величины обратного хода бойка пресса при заданных параметрах подачи поковки клещами манипулятора„ При равенстве ТМ-ТН подстройка величины обратного хода не производится.
Частота, генератора 26 импульсов и соотношений частот с выходов делителя 27 частрты устанавливается при вводе комплекса в эксплуатацию, которые должны соответствовать скоростям координатных перемещений манипулятора и движений бойка пресса в масштабе на несколько порядков ниже ре- альчого времени работы комплекса,что необходимо для введения коррекции при незначительном подъеме бойка преса после совершения им нижнего реверса.
Автоматическая подстройка величины возвратного хода бойка пресса позволяет производить ковку поковок при одтимальных величинах возвратного ход бойка пресса для- заданных, техноло гкческих параметров подач поковки в рабочую зону пресса ковочным манипулятором, что сокращает время обработки, повышая тем самым производительность ковки о
Формула изобретения
Устройство для управления ковочным комплексом, содержащее задатчи96
ки размеров ковки, поворота и осевого перемещения клещей манипулятора, переключатель перебега возвратного
хода бойка пресса, сумматор, реверсивный счетчик, а также блоки управления приводами вращения и осевого перемещения клещей манипулятора,блоки считьгоания текущих координат и
сравнения, блок установки величины возвратного хода бойка пресса, пер- - вый и второй входы которого, а также первый и второй входы реверсивного счетчика соединены соответственно
с первым и вторым выходами блока считьшания текущих координат, а выход реверсивного счетчика соединен с первым ВХОДОМ блока сравнения, выход которого подключается к гидросистеме управления прессом, а вто- ,рой вход соединен с выходом сумматора, первый и второй входы которого соединены соответственно с задат- чиком размеров ковки и переключателем перебега возвратного хода бойка пресса, а третий вход - с первым выходом блока установки величины возвратного хода бойка пресса, вторым выходом подключенного к первым входам блоков управления приводами вращения и осевого перемещения клещей манипулятора, вторые входы которых соединены соответственно с задатчи- ками поворота и осевого перемещения
клещей манипулятора, отличающееся тем, что, с целью повышения производительности ковки за счет автоматической установки оптимальной величины возвратного хода бойка пресса, оно снабжено блоком автоматической подстройки величины возвратного хода бойка пресса, первый и второй, входы которого соединены соответственно с задатчиками поворота и осевого перемещения клещей манипулятора, третий и четвертый входы - с первым и вторым выходами блока установки величины возвратного хода бойка пресса, третий и четвертый вход которого соединены с первым и вторым выходами
блока автоматической подстройки величины возвратного хода бойка пресса.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления ковочным комплексом | 1989 |
|
SU1685751A1 |
| БЛОК-СХЕМА УПРАВЛЕНИЯ ПЕРЕМЕЩЕНИЕМ КОВОЧНОГО | 1973 |
|
SU369969A1 |
| Передняя подвеска хобота ковочногоМАНипуляТОРА | 1979 |
|
SU816656A1 |
| Устройство для позиционирования бойка гидравлического пресса | 1983 |
|
SU1123889A1 |
| Радиально-ковочная машина | 1979 |
|
SU804164A1 |
| СПОСОБ ИЗГОТОВЛЕНИЯ ПОЛЫХ ПОКОВОК И КОВОЧНЫЙ КОМПЛЕКС ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2486985C2 |
| СПОСОБ ИЗГОТОВЛЕНИЯ ПОКОВОК С МЕЛКОЗЕРНИСТОЙ СТРУКТУРОЙ | 2011 |
|
RU2474484C1 |
| Устройство для управления гидравлическим ковочным прессом | 1977 |
|
SU749688A2 |
| Механизм вращения хобота ковочного манипулятора | 1982 |
|
SU1038052A1 |
| Способ ковки поковок типа пластин | 1980 |
|
SU889248A1 |
Изобретение относится к машиностроению, в частности к оборудованию для обработки металлов давлением, и может быть использовано в устройствах управления ковочными комплексами. Цель изобретения - повышение производительности ковки за счет автоматической установки оптимальной величины возвратного хода бойка пресса. Устройство содержит задатчики размеров ковки, поворота и осевого перемещения клещей манипулятора, переключатель перебега возвратного хода бойка пресса, сумматор, реверсивный счетчик, блоки считывания текущих координат и сравнения, блок установки величины возвратного хода бойка пресса и блок автоматической подстройки величины возвратного хода бойка пресса. Последний позволяет обеспечить управление ковочным комплексом в автоматическом режиме без задания и ручной регулировки величины возвратного хода бойка пресса при изменении величины подач и кантовок поковки манипулятором. 3 ил.
| Двигатель внутреннего горения с цилиндрами, расположенными параллельно оси вала | 1924 |
|
SU2500A1 |
