1
Изобретение относится к области обработки металлов давлением.
Известен способ управления ковочным агрегатом, включающим периодическое перемещение тележки манипулятора с поковкой, зажатой в хоботе, для подачи ее в бойки пресса.
Для увеличения точности подачи поковки после прохождения тележкой расстояния, равного подаче, останавливают хобот с помощью механизма торможения, а во время захвата поковки бойками пресса тормозят манипулятор с последующим его разгоном с началом подъема верхнего пресса, при этом ход бойка выбирают в зависимости от степени обжатия и отклонения хобота от среднего положения путем суммирования пути, проходимого бойками в процессе обжатия и пути, проходимого хоботом, перемещающимся отпосительно тележки.
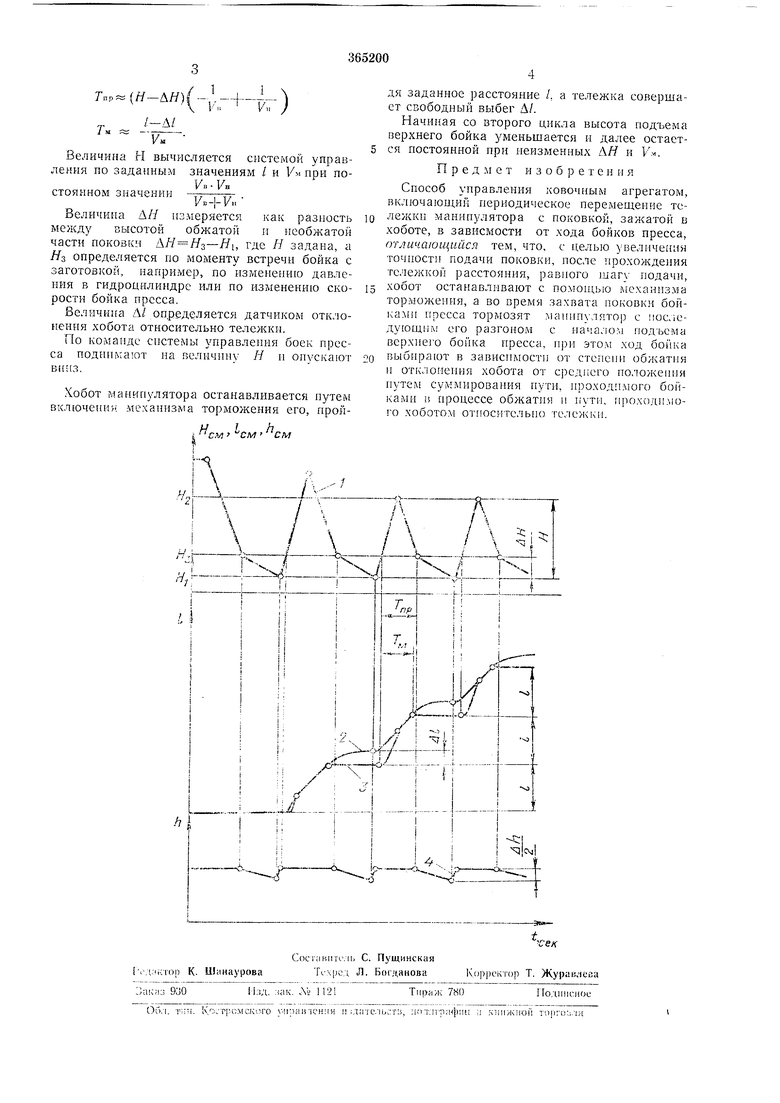
Сущность изобретения поясняется циклограммой, изображенной на чертеже, где по горизонтально оси откладывается время /, по вертикальной - перемещения бойка пресса Я, осп хобота с поковкой Л и манипулятора /.
На циклогралгме линия / показывает путь бойка пресса, линия 2-осевое перемещение тележки манипулятора, линия 3 - осевое перемещение хобота манипулятора с поковкой.
линия 4 - вертикальное неремен1С1П1е оси хобота с поковкой.
В начале работы поковка расположена над нижним бонком пресса, а верхний боек поднят.
По сигналу начала работы верхний боек нресса опускается до заданного ноложення //1. а затем реверсируется.
Одновременно с реверсом вк.пючается привод перемещення манипулятора и начинается измерение пути. Д,1я того, чтобы манипулятор спел пройти заданное расстояние / до момента захвата поковки бойками пресса, ход верхнего бонка определяется неравенством:
/-Л/ / 1.. 1Л,
Л/-/ Г/
1. г„ )
где: ЛЯ-величина обжатия поковки;
/-величина подачи на боек за каждый ход пресса;
./-величина отклонения хобота относительно тележки манипулятора; VM - скорость движения манипулятора; Vu - скорость подъема бойка пресса; Ill - скорость опускания бойка нресса. Данное выражение выводится из соотношения Гпр 7м циклограммы,
где Jiip - время хода бойка пресса;
Гм -время неремещения манипулятора:
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ управления работой ковочного агрегата | 1980 |
|
SU946774A1 |
| Способ управления ковочным манипулятором | 1978 |
|
SU724267A1 |
| КОВОЧНЫЙ МАНИПУЛЯТОР | 1969 |
|
SU236207A1 |
| КОВОЧНЫЙ МАНИПУЛЯТОРbrtSJi/iOV ЕКА | 1971 |
|
SU321316A1 |
| БЛОК-СХЕМА УПРАВЛЕНИЯ ПЕРЕМЕЩЕНИЕМ КОВОЧНОГО | 1973 |
|
SU369969A1 |
| Устройство осевого перемещения хобота ковочного манипулятора | 1976 |
|
SU1038051A1 |
| Передняя подвеска хобота ковочногоМАНипуляТОРА | 1979 |
|
SU816656A1 |
| УСТРОЙСТВО ДЛЯ КОВКИ ПОКОВОК КОЛЕЦ | 1992 |
|
RU2009758C1 |
| Привод продольного перемещения тележки и хобота ковочного манипулятора | 1980 |
|
SU946775A1 |
| ПРИБОР ДЛЯ АВТОМАТИЧЕСКОГО КОНТРОЛЯ ПЕРЕМЕЩЕНИЯ ПОКОВКИ ПРИ СВОБОДНОЙ КОВКЕ | 1969 |
|
SU238998A1 |
