1
Изобретение о.т носитс1Я .к устройствам Слож ного периодического движения и мюжет быть использован.0. в различных областях техники, ,на,ПрИ1мер, в лриборостроеняи.
Известны механизмы дяя лреобразовайия во1зв|ратн10-1поступатель1ного движения в сложное периодическое, содержащие корпус,, вюзвратно-поступательно движущееся, подпружИНениЬе в направлении п;еремещени1я, ведущее звено, на котором установпены с вюзм10Ж|НОстью поворота храловик, взаимодействующее- с последнем ведомое звено и подпружиненвая в наор.авлени; к центру Х раиОВ(И.ка стопорная собачка.
|Предлагае1Мъй механизм отличается от известных тем, ЧТО его корпус снабже|н подпружлненным в Нанравлении перемещения ведущего 31вена двуплечим рычагом, установленной на последием с возможностью mOiBiopOTa толкающей ообач)кой, подпружиненной в напра-вшении к де1нт;ру храповика -и вза,И1М10дейст1вуюЩей с Н1им, а ведущее звейо снабжено регулировочным ви1нтом, воздействующ1И1М на двуплечий рычаг.
Такое выполнение механизм а позволяет регулировать сложн1ое периодяческое движение.
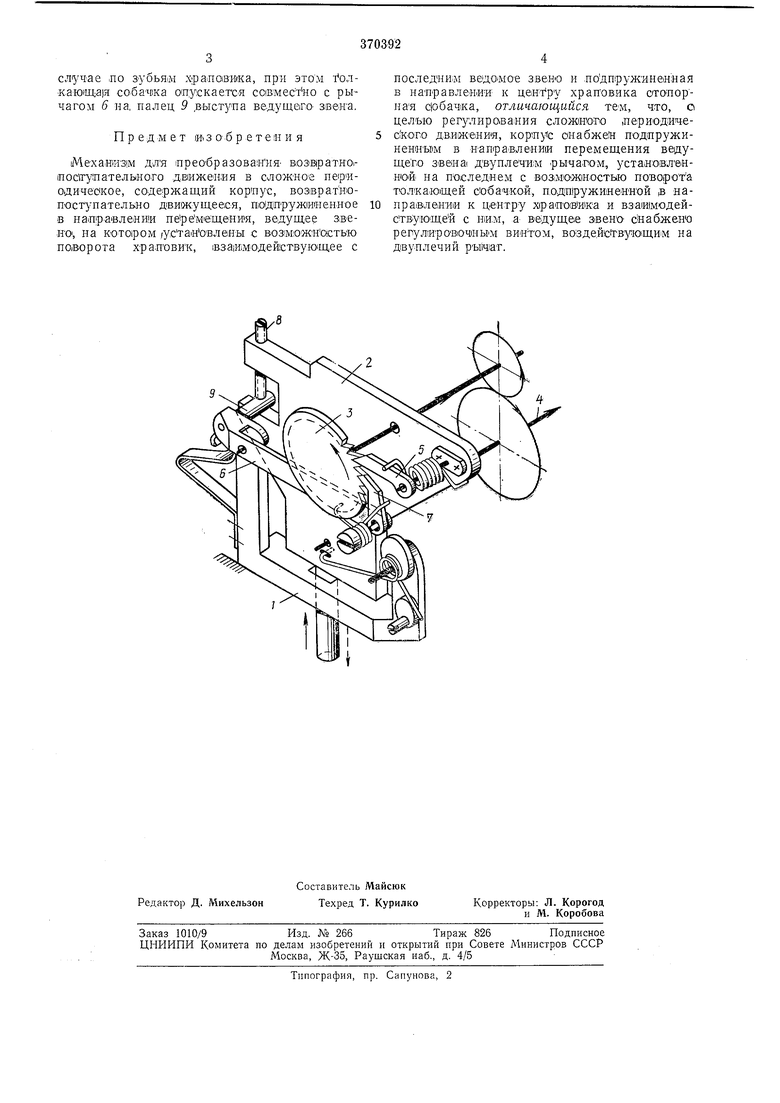
На чертеже схематическИ показ-аи предложенный меканизм.
Механизм содерж1ит корнус 1, возвр-атнопоступательно движущееся, подпружиненное в направлении перемещений, ведущее звано 2, на которо:м уста,н1ов:.1ены с возможностью .поворота храповик 3, взаимодейс(твую1цее с последним пооредством зубчатой передачи звено 4 и подпружиненная в напр:авлении к цент ру Х раповика стопорная собачка 5. Корпус снабжен подпружиненным
в направлении пере|мещен1ия ведущего звен1а двуплечиш рычагом 6, установленной на последнем с во31можностьЮ nOiBopOTa тошкающей собачкой 7, подпружиненной в направлении к центру храповика и взаи1модейСТвующей с HHiM, а ведущее звено снабжено регулировочньпм винтом 8, воздеййтвующи-м на рычаг посредством пальца 9. Ведущее возвратно-поступательно дв-ии ущееСя звено 2 при своем движе|нии вниз сообщает ведоMiOMy звену 4 поступательное Д1НиженИ|е и при взаимодействии рег}-лирово.чпого винта 8 с рычагом 6 посредством пальца 9 восп1ронзводит о помощью собачки 7, храповика 3 и зубчатой лередачи одновременное с
пос1тупа1тельны1М движением вращательное движение ведомого звена 4.
При движении вверх ведущего звеиа ведомое звено получает только поступательное движение, так ка.к стопорная 5 и толК а1ющая 7 собачки проска 1ьзывают в данном
случае ,по зубьяим храловика, при этом 1 олкающащ собачка опускается совместно с рычагом 6 на, палец 9 .выступа ведущего sisewa,
Предмет и з о б р е т е н и я
Мехакизм для преобразования Бозаратног 1пос ту1пательно-го движения в сложиое периодическое, содержащий корпус, возвратноПОступателвно движущееся, пюйпруж1И1ненное в натер авлений перемещения, ведущее 31веНО, на котором ,уста Новле1Ны с БОЗможиастьЮ поворота храяовик, взаимодействующее с
последни;м ведоФЮе звено и лодпружинеииая в направлении к храповика спгопорная сюбачка, отличающийся тем, что, о целью регулирова1ния сложного лериодичеdKoro дв.ижения, корпус онабже н подпружинениъш в направлеиии перемещения ведущего звеиа двуплечИ1М рычагом, установлвннюй на последнем с воз мюжиостью поворота тол кающей собачкой, подпружинеииой з направлении к центру xipаповика и взаимодействующей с ни.м, а Вбдущее звено- сиабженю регулировочныМ винтом, во здействующи1М на двуплечий ръйчаг.