Известны дистанционные копирующие манипуляторы по( основному авт. «св. N° 275680 с воспроиэводением усилия нагрузки задающим органом на руке оператора, выполненные в виде управляемых сервоприводами задающего и исполнительного органов из последовательно соединенных звеньев с параллельными осями поворота и датчиками нагрузки, а на каждом звене исполнительного органа установлены акселерометры.
Описываемый манипулятор отличается от известных тем, что он снабжен звеном иоворота плеча, и а котором устаиовлены два акселерометра, причем ось чувствительности одногоиз них наиравлена но линии пересечения плоскости, параллельной плоскости качания звеньев манипулятора, и плоскости, перпендикулярной оси поворота плеча, а ось чувствительности другого - иерпендикулярна плоскости качания звеньев Л1анипулятора, что расширяет зоиу манипулирования и иовышает точность.
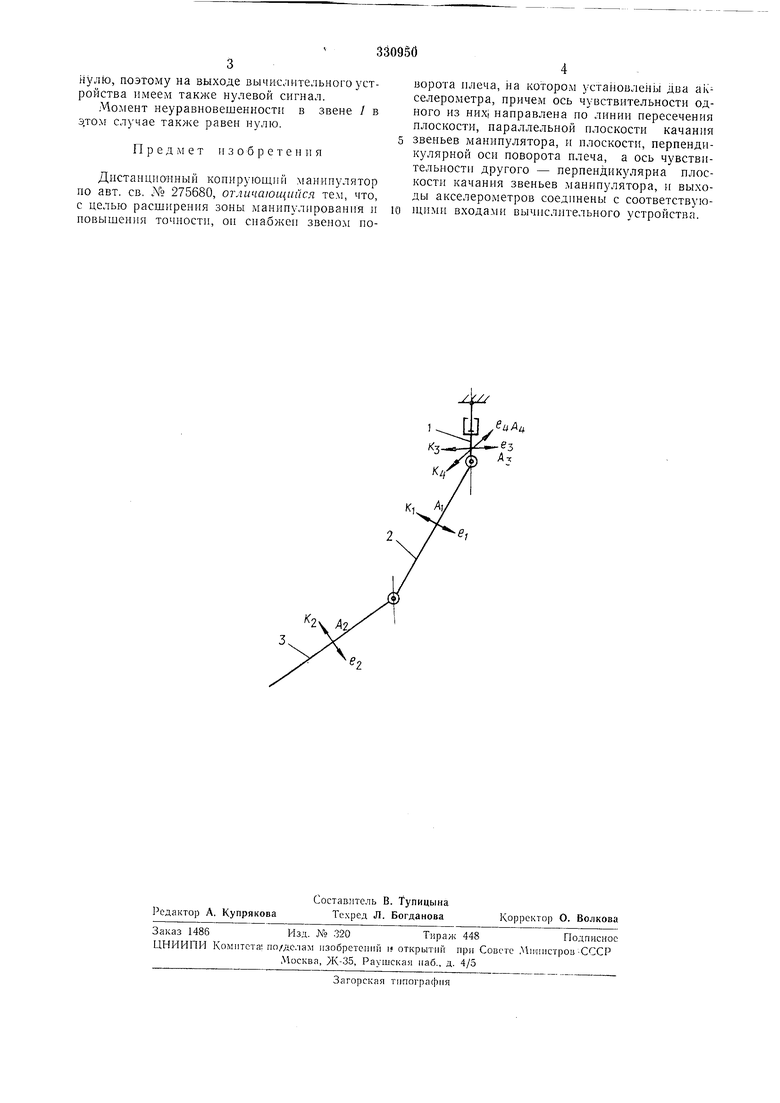
Па чертеже показана упрощенная кинематическая схема одного из органов манипулятора.
Задающий и исполнительный органы манипулятора состоят из трех основных звеньев 1, 2, 3 (см. чертеж: плечи и предплечья) поворота. Звенья 2 II 3 имеют параллельные оси поворота, а звено / - ось поворота, иерпендикулярную оси поворота звена 2.
На каждом звене установлен акселерометр: . на плече, Аг -на предплеч11и, .причем их оси /(, /1 и , /2 чувствительности лежат в плоскости качания звеньев перпендикулярно плоскости, проходящей через центр тяжести соответствующего звена и ось поворота этого же звена, Лз и А - на звене поворота плеча,
причем ось /Сз, h чувствительности акселерометра Лз лежит в плоскости качания звеньев манипулятора перпендикулярно оси поворота плеча, а ось 4, /4 чувст1вительности акселерометра Л.1 лелчит перпендикулярно илоскости
качания звеньев.
Выходы акселерометров Л,, Л г; и Лз соединены с суммирующим входом вычислительного устройства (на чертеже не показан), а акселерометра Л - с неремножающим входом вычислительного устройства.
При повороте плеча и иредплечия относнтельно собственных осей акселерометры А и
Л2 выдают сигналы, пропорциональные сииусам относительных углов поворота плеча и
предплечия.
При горизонтальном положении оси /С4, /4 чувствительности акселерометра Л4 и вертикальном положении оси поворота плеча сигпал, сипмаемый с акселерометра Л4, равен
нулю, поэтому на выходе вычислительного устройства имеем также нулевой сигнал.
Момент неуравновешенности в звене / в Э.ТОМ случае также равен нулю.
Предмет изобретения
Днстанционный колирующий манииулятор ио авт. св. NO 275680, отличающийся тем, что, с целью расширения зоны манипулирования и повышения точности, он снабже 1 звеном поворота нлеча, на которо.м установлены Два ai селерометра, причем ось чувствительности одного из HHxXi направлена по линии пересечения плоскости, параллельной плоскости качания звеньев манипулятора, и плоскости, перпендикулярной оси поворота плеча, а ось чувствительности другого - перпендикулярна плоскости качания звеньев манипулятора, и выходы акселерометров соединены с соответствующими входа:ми вычислительного устройства.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА КОМПЕНСАЦИИ СТАТИЧЕСКОГО МОМЕНТА В ЗВЕНЕ РОТАЦИИ ПЛЕЧА ДИСТАНЦИОННОГО МАНИПУЛЯТОРА | 1973 |
|
SU381501A1 |
| ДИСТАНЦИОННЫЙ КОПИРУЮЩИЙ МАНИПУЛЯТОР | 1970 |
|
SU275680A1 |
| Очувствленный дистанционный копирующий манипулятор | 1973 |
|
SU448950A1 |
| Устройство компенсации статических моментов | 1975 |
|
SU561657A1 |
| МАНИПУЛЯТОР | 1970 |
|
SU271252A1 |
| Исполнительный орган манипулятора | 1975 |
|
SU541662A2 |
| Манипулятор | 1980 |
|
SU919804A1 |
| Устройство для управления манипулятором | 1987 |
|
SU1445948A1 |
| ДИСТАНЦИОННЫЙ МАНИПУЛЯТОР | 1973 |
|
SU398386A1 |
| Микроманипулятор | 1981 |
|
SU949255A2 |
Ц.иА
е
