1
Изобретение относится к манипуляторным устройствам с дистанционным управлением и может быть иснользовано при проектировании очувствленных манипуляторов с пространственной кинематикой, устанавливаемых на подвижном основании.
Известны манипуляторы, содержащие корпус и последовательно соединенные шарнирами звенья, в которых система уравновешивания реализуется на синусно-косинусных вращающихся трансформаторах и акселерометрах.
Однако такие системы уравнрвещивания пе обеспечивают компенсацию моментов неуравновещенности в плечевом суставе относительно осей, лежащей в плоскости качания предплечья для манипуляторов, связанных с корпусом карданным щарниром, что в конечном итоге значительно снижает точность манипулирования.
Цель изобретения - увеличение точности манипулирования.
Это достигается тем, что два потенциометрических акселерометра установлены на крестовине кардана, а два синусно-косинусных вращающихся трансформатора - на звене плеча, оси чувствительности акселерометров и оси вращения синусно-косинусных вращающихся трансформаторов параллельны оси щарнира, соединяющего звенья предплечья и
плеча, ротор одного из вращающихся трансформаторов кинематически связан со звеном предплечья, а ротор другого вращающегося трансформатора жестко соединен с крестовиной кардана, причем косинусная обмотка каждого вращающегося трансформатора соединена с потенциометром соответствующего акселерометра.
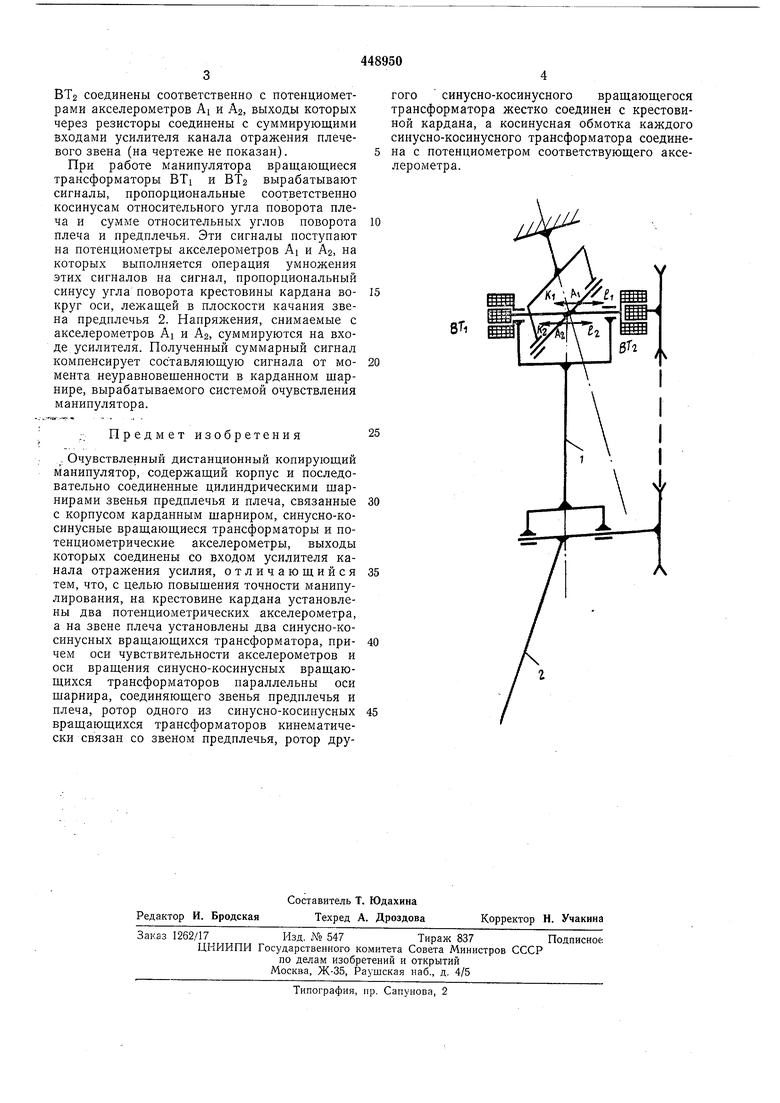
На чертеже изображена кинематическая
схема задающего или исполнительного органа манипулятора.
Манипулятор состоит из последовательно соединенных звеньев плеча 1 и предплечья 2. Каждое звено имеет отдельный привод (не показан). Звено плеча соединено с корпусом карданным щарниром, на котором установлены два синусно-косинусных вращающихся трансформатора. Статор вращающегося трансфюрматора BTi жестко связан со звеном
плеча, а его ротор - с крестовиной кардана. Статор вращающегося трансформатора ВТ2 жестко связан с крестовиной кардана, а его ротор через механическую передачу с коэффициентом передачи, равным 1, - с предплечьем. На крестовине кардана установлены два потенциометрических акселерометра AI и АИ, причем их оси чувствительности и /( параллельны оси щарнира, соединяющего звенья предплечья и плеча. Косинусные обмотки вращающихся трансформаторов BTj и
ВТ2 соединены соответственно с потенциометрами акселерометров AI и Ag, выходы которых через резисторы соединены с суммирующими входами усилителя канала отражения плечевого звена (на чертеже не показан).
При работе манипулятора вращающиеся трансформаторы BTi и ВТ2 вырабатывают сигналы, пропорциональные соответственно косинусам относительного угла поворота плеча и сумме относительных углов поворота плеча и предплечья. Эти сигналы поступают на потенциометры акселерометров AI и Ад, на которых выполняется операция умножения этих сигналов на сигнал, пропорциональный синусу угла поворота крестовины кардана вокруг оси, лежащей в плоскости качания звена предплечья 2. Напряжения, снимаемые с акселерометров AI и Аг, суммируются на входе усилителя. Полученный суммарный сигнал компенсирует составляющую сигнала от момента неуравновещенности в карданном щарнире, вырабатываемого системой очувствления манипулятора.
Предмет изобретения
, Очувствленный дистанционный копирующий Манипулятор, содержащий корпус и последовательно соединенные цилиндрическими щарнирами звенья предплечья и плеча, связанные с корпусом карданным щарниром, синусно-косинусные вращающиеся трансформаторы и потенциометрические акселерометры, выходы которых соединены со входом усилителя канала отражения усилия, отличающийся тем, что, с целью повыщения точности манипулирования, на крестовине кардана установлены два потенциометрических акселерометра, а на звене плеча установлены два синусно-косинусных вращающихся трансформатора, причем оси чувствительности акселерометров и оси вращения синусно-косинусных вращающихся трансформаторов параллельны оси щарнира, соединяющего звенья предплечья и плеча, ротор одного из синусно-косинусных вращающихся трансформаторов кинематически связан со звеном предплечья, ротор другого синусно-косинусного вращающегося трансформатора жестко соединен с крестовиной кардана, а косинусная обмотка каждого синусно-косинусного трансформатора соединена с потенциометром соответствующего акселерометра.
8Г1
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство компенсации статических моментов | 1975 |
|
SU561657A1 |
| СИСТЕМА КОМПЕНСАЦИИ СТАТИЧЕСКОГО МОМЕНТА В ЗВЕНЕ РОТАЦИИ ПЛЕЧА ДИСТАНЦИОННОГО МАНИПУЛЯТОРА | 1973 |
|
SU381501A1 |
| СИСТЕМА КОМПЕНСАЦИИ СТАТИЧЕСКОГО МОМЕНТА | 1973 |
|
SU373141A1 |
| МАНИПУЛЯТОР | 1971 |
|
SU313653A1 |
| УСТРОЙСТВО ДЛЯ ПРЕОБРАЗОВАНИЯ УГЛА ПОВОРОТА ИСПОЛНИТЕЛЬНОЙ ОСИ | 1991 |
|
RU2085833C1 |
| Манипулятор | 1975 |
|
SU743861A1 |
| ИНКЛИНОМЕТР | 1995 |
|
RU2111454C1 |
| Устройство для управления манипулятором | 1984 |
|
SU1226406A1 |
| Копирующий манипулятор | 1978 |
|
SU686865A1 |
| ДИСТАНЦИОННЫЙ КОНИРУЮ(ЦИЙ МАНИНУЛЯТОР | 1972 |
|
SU330950A1 |
