,%
Изобретение относится к устройствам управления землеройными машинами и может быть использовано, например, при построении систем управления экскаваторами и манипуляторами.
Цель изобретения - повышение эффективности эксплуатации за счет уменьшения затрат на точную регулировку системы.
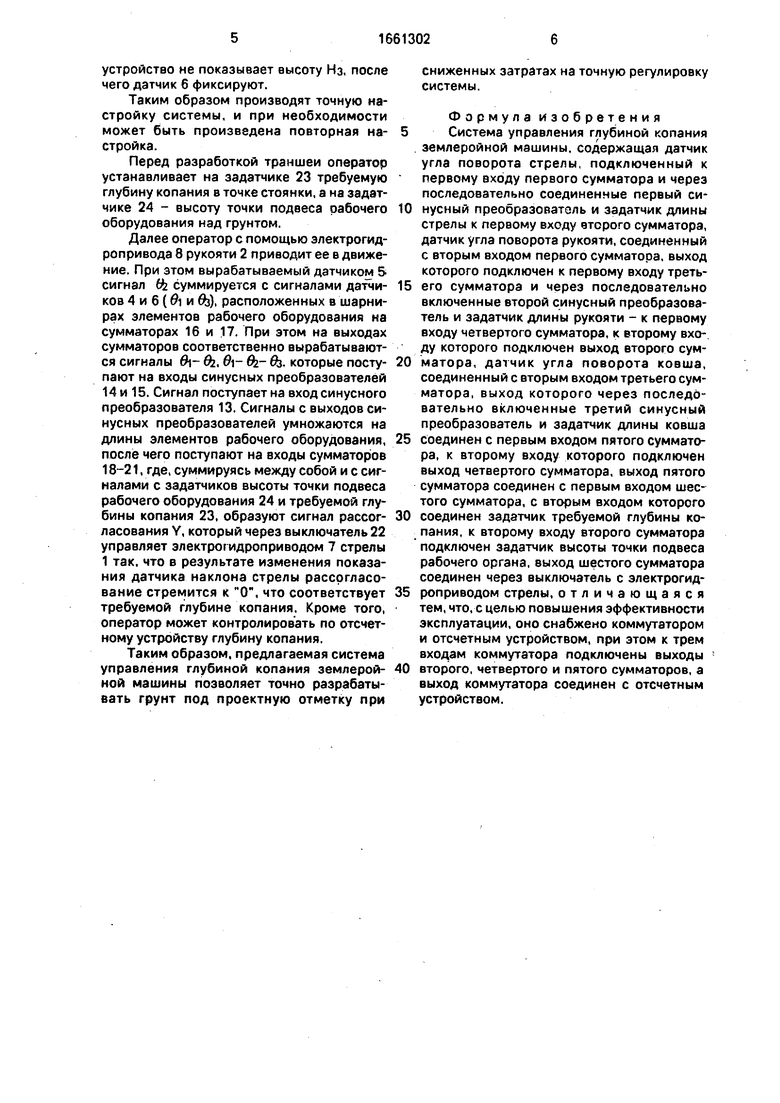
На фиг. 1 представлена схема реализации предлагаемой системы; на фиг. 2 - параметры, входящие в алгоритм управления.
Система управления глубиной копания землеройной машины включает элементы рабочего оборудования: стрелу 1, рукоять 2, ковш 3, датчики 4-6 взаимного расположения элементов рабочего оборудования, элементы 7-9 электрогидропривода рабочего оборудования, задатчики 10-12 длин элементов рабочего оборудования, синусные преобразователи 13-15, сумматоры 16-21, выключатель 22, задатчик 23 требуемой глубины копания, задатчик 24 высоты точки подвеса рабочего оборудования, коммутатор 25 и отсчетное устройство 26.
В шарнире стрелы 1 установлен датчик 4 угла поворота стрелы относительно машины, выход которого соединен с положительным входом первого сумматора 16 и с входом первого синусного преобразователя 13. Отрицательный вход сумматора 16 соединен с выходом датчика 5 угла поворота рукояти 2. Выход сумматора 16 соединен с входом второго синусного преобразователя 14 и положительным входом третьего сумматора 17. Отрицательный вход сумматора 17 соединен с выходом датчика 6 угла поворота ковша 3. Выход сумматора 17 соединен с входом третьего синусного преобразователя 15. Выходы синусных преобразователей 13-15 соответственно соединены с входами задатчиков 10-12 длин элементов рабочего оборудования, выходы которых соединены с входами второго 18, четвертого 19 и пятого 20 сумматоров.
Второй вход iсумматора 18 соединен с выходом задатчика 24 высоты точки подвеса рабочего оборудования, а выход- с вторым входом сумматора 19 и первым входом коммутатора 25, выход хоторого соединен с входом отсчетного устройства 26. Выход сумматора 19 соединен с вторым входом коммутатора 25 и с вторым входом сумматора 20. Выход сумматора 19 соединен с третьим входом коммутатора 25 и с вторым входом шестого сумматора 21, второй вход которого соединен с выходом задатчика 23 требуемой глубины копания. Выход сумматора 21 через выключатель 22 соединен с входом элемента 7 электрогидропривода элемента 1 рабочего оборудования (стрелы).
Система работает следующим образом. При работе устройства машинист приводит в действие хотя бы один из элементов рабочего оборудования (например, рукоять). При этом углы взаимного поворота 01, 02, и 0з каждого из элементов измеряются с помощью соответствующих датчиков. По полученным углам поворота элементов определяется угол поворота каждого из них
относительно горизонтальной плоскости. Далее определяется величина рассогласования между заданной и текущей глубиной копания Y по формуле
Y U sln 01+ (0i-02)+
+ ( 01- 02- 03)+Y0+ Do,
где Li, L-2 и La - длины элементов рабочего оборудования;
Yo - высота до точки подвеса рабочего оборудования;
D - требуемая глубина копания.
Далее с помощью электрогидропривода один из элементов, не участвовавший до этого в процессе копания (например, стрела), поворачивается вокруг оси, соединяющей этот элемент с предыдущим, до тех пор, пока величина Y на становится равной нулю. Однако для нормального функционирования устройства, как следует из расчетных и структурных схем, датчики должны быть с
точностью долей градуса установлены на рабочем оборудовании так, чтобы при угле, принятом за нулевой, показания датчиков были равны нулю.
Для этого экскаватор ставят на площад«у и на задатчике 24 устанавливается высота подвеса рабочего оборудования над площадкой, после этого оператор измеряет высоту над площадкой оси поворота датчика 5 угла поворота стрелы (Hi), высоту над площадкой оси поворота датчика 6 угла поворота рукояти (Н2) и высоту над площадкой режущей кромки ковша (Нз).
Отсчетное устройство 26 через коммутатор 25 соединяют с выходом сумматора 18 и
оператор вращает датчик 4 угла поворота стрелы относительно базы экскаватора до тех пор, пока отсчетное устройство не показывает высоту Hi, после чего датчик 4 фиксируют.
Далее отсчетное устройство 26 через коммутатор 25 соединяется с выходом сумматора 19, и оператор вращает датчик 5 угла поворота рукояти до тех пор, пока отсчетное устройство не показывает высоту Нз, после
чего датчик 5 фиксируют.
Далее отсчетное устройство 26 через коммутатор 25 соединяется с выходом сумматора 20, и оператор вращает датчик 6 угла поворота ковша до тех пор, пока отсчетное
устройство не показывает высоту Нз, после чего датчик б фиксируют.
Таким образом производят точную настройку системы, и при необходимости может быть произведена повторная настройка.
Перед разработкой траншеи оператор устанавливает на задатчике 23 требуемую глубину копания в точке стоянки, а на задатчике 24 - высоту точки подвеса рабочего оборудования над грунтом.
Далее оператор с помощью электрогидропривода 8 рукояти 2 приводит ее в движение. При этом вырабатываемый датчиком 5 сигнал ф суммируется с сигналами датчиков 4 и 6 (#1 и 0з), расположенных в шарнирах элементов рабочего оборудования на сумматорах 16 и 17. При этом на выходах сумматоров соответственно вырабатываются сигналы ft- 02, 01- 02- 0з- которые поступают на входы синусных преобразователей 14 и 15. Сигнал поступает на вход синусного преобразователя 13. Сигналы с выходов синусных преобразователей умножаются на длины элементов рабочего оборудования, после чего поступают на входы сумматоров 18-21, где, суммируясь между собой и с сигналами с задатчиков высоты точки подвеса рабочего оборудования 24 и требуемой глубины копания 23, образуют сигнал рассогласования Y, который через выключатель 22 управляет электрогидроприводом 7 стрелы 1 так. что в результате изменения показания датчика наклона стрелы рассогласование стремится к О, что соответствует требуемой глубине копания. Кроме того, оператор может контролировать по отсчет- ному устройству глубину копания.
Таким образом, предлагаемая система управления глубиной копания землеройной машины позволяет точно разрабатывать грунт под проектную отметку при
сниженных затратах на точную регулировку системы.
Формула изобретения
Система управления глубиной копания
землеройной машины, содержащая датчик
угла поворота стрелы, подключенный к
первому входу первого сумматора и через
последовательно соединенные первый синусный преобразователь и задатчик длины стрелы к первому входу второго сумматора, датчик угла поворота рукояти, соединенный с вторым входом первого сумматора, выход которого подключен к первому входу третьего сумматора и через последовательно включенные второй синусный преобразователь и задатчик длины рукояти - к первому входу четвертого сумматора, к второму вхо-. ду которого подключен выход второго сумматора, датчик угла поворота ковша, соединенный с вторым входом третьего сумматора, выход которого через последовательно включенные третий синусный преобразователь и задатчик длины ковша
соединен с первым входом пятого сумматора, к второму входу которого подключен выход четвертого сумматора, выход пятого сумматора соединен с первым входом шестого сумматора, с вторым входом которого
соединен задатчик требуемой глубины копания, к второму входу второго сумматора подключен задатчик высоты точки подвеса рабочего органа, выход шестого сумматора соединен через выключатель с электрогидроприводом стрелы, отличающаяся тем, что, с целью повышения эффективности эксплуатации, оно снабжено коммутатором и отсчетным устройством, при этом к трем входам коммутатора подключены выходы
второго, четвертого и пятого сумматоров, а выход коммутатора соединен с отсчетным устройством.
П
iLsin O,)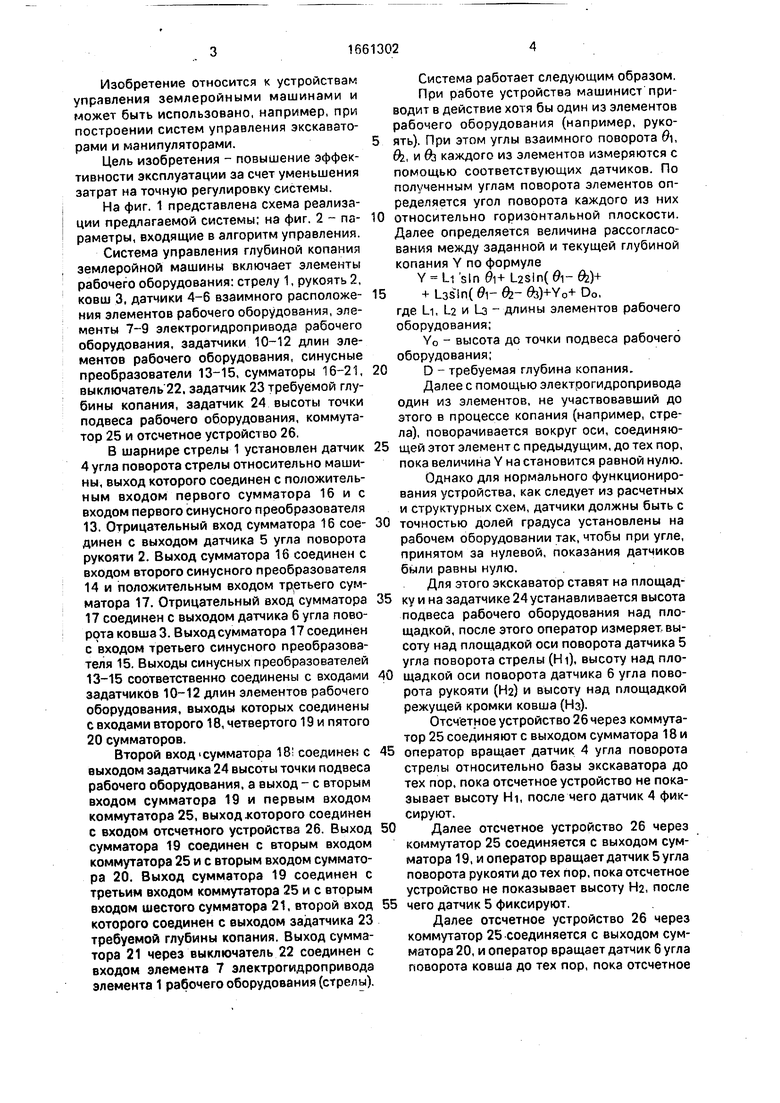
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ определения высоты точки подвеса рабочего оборудования землеройной машины после ее переезда относительно дна разрабатываемой траншеи с продольным уклоном | 1989 |
|
SU1740570A1 |
| Устройство управления глубиной копания землеройной машины | 1988 |
|
SU1587150A1 |
| Устройство для автоматического регулирования положения ковша гидравлического экскаватора | 1988 |
|
SU1587149A1 |
| Система для определения глубины копания одноковшовым экскаватором | 1987 |
|
SU1476082A1 |
| Устройство для автоматического регулирования положения ковша гидравлического экскаватора | 1985 |
|
SU1258958A1 |
| Устройство для управления экскаватором типа "прямая лопата | 1983 |
|
SU1113490A1 |
| Рабочее оборудование экскаватора | 1986 |
|
SU1435718A1 |
| УСТРОЙСТВО для УПРАВЛЕНИЯ ОДНОКОВШОВЫМ ЭКСКАВАТОРОМ | 1971 |
|
SU308153A1 |
| Система контроля расстояния между ковшом экскаватора и поверхностью стенки трубопровода | 2019 |
|
RU2743981C1 |
| Устройство для управления приво-дОМ пОВОРОТА КОВшА эКСКАВАТОРА | 1979 |
|
SU810913A1 |
Изобретение относится к управлению землеройными машинами. Цель - повышение эффективности эксплуатации за счет уменьшения затрат на точную регулировку системы. Система состоит из датчиков 4 - 6 и задатчиков 10 - 12 длин взаимного расположения элементов рабочего оборудования (РО) - стрелы 1, рукояти 2 и ковша с элементами 7 - 9 их электропривода, синусных преобразователей (СП) 13 - 15, сумматоров (С) 16 - 21, выключателя 22 и задатчиков 24 высоты точки подвеса РО и задатчика 23 требуемой глубины копания. Дополнительно система снабжена коммутатором 25 и отсчетным устр-вом 26. Посредством отсчетного устр-ва 26, соединяемого последовательно через коммутатор 25 с датчиками 4 - 6, производят точную настройку системы. Задатчиками 23 и 24 устанавливают соответственно требуемую глубину копания и высоту точки подвеса РО над грунтом. При движении, например, рукояти 2 датчик 5 вырабатывает сигнал, который суммируется с сигналами датчиков 4 и 6 на С 16, 17. С выходов С 16 и 17 сигналы поступают на входы СП 14, 15, а с датчика 4 - на вход СП 13. С выходов СП 13 - 15 сигналы после умножения на длины элементов РО поступают на входы С 18 - 21, где, суммируясь между собой и с сигналами с задатчиков 24 и 23, образуют сигнал рассогласования. Последний через выключатель 22 управляет элементом 7 электропривода стрелы 1. Устр-во 26 контролируется глубина копания. 2 ил.
U
Фм.2
| Патент США Мг 4288196, кл | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Способ окисления боковых цепей ароматических углеводородов и их производных в кислоты и альдегиды | 1921 |
|
SU58A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
