1
Изобретение относится к одноковшовым экскаваторам тина прямая лопата н предназ1:ачено для определения углов резания, толщины стружки и т. п. при экспернментальных исследованиях процесса копания.
Известно устройство для записи траектории движения ковша, включающее самопишуший прибор, датчик длнны подъемного каната и датчик вылета рукояти 1.
Недостаток этого устройства заключается в том, что траектория движепня зубьев ковша строится вручную но запнсываемым длине подъемного каната и вылету рхкояти, а это требует много времени, снижает точность и исключает возможность оперативного получення непосредственно траектории движення зубьев ковша экскаватора. Кроме того, такое устройство не учитывает обкатывание рукояти вокруг ее вала, что также влияет на точность результатов.
Известно устройство для заннсн траектории движентш зубьев ковша одноковшового экскаватора, включающее датчик угла наклона, синусно-косннусный трансформатор, связанный с двумя вынрямительными мостами, и регистрирующий прибор, позволяющее фиксировать ряд параметров для построения траектории движеиия ковша.
Недостатком известного устройства являJ ется невозможность получения оперативной
9
записи непосредственной траектории движения зубьев ковша экскаватора, что влечет за собой неточность записи.
С нелью иовьпиения точности зантгсн предлагаемое устройство снабжено датчпком вылета рукояти и блоком вычисления координат положения ковша, к входам которого подключены выходы датчнков угла наклона и вылета рукояти и выходы выпрямительных мосток, а к выходам - регнстрирующнй нрнбор, нрнчем блок вычисления координат положения ковша выполнен в виде трех сумматоров и двух блоков иеремноження, к входам которых подключены выходы первого с мматора, а к выходам - входы двух других сумматоров.
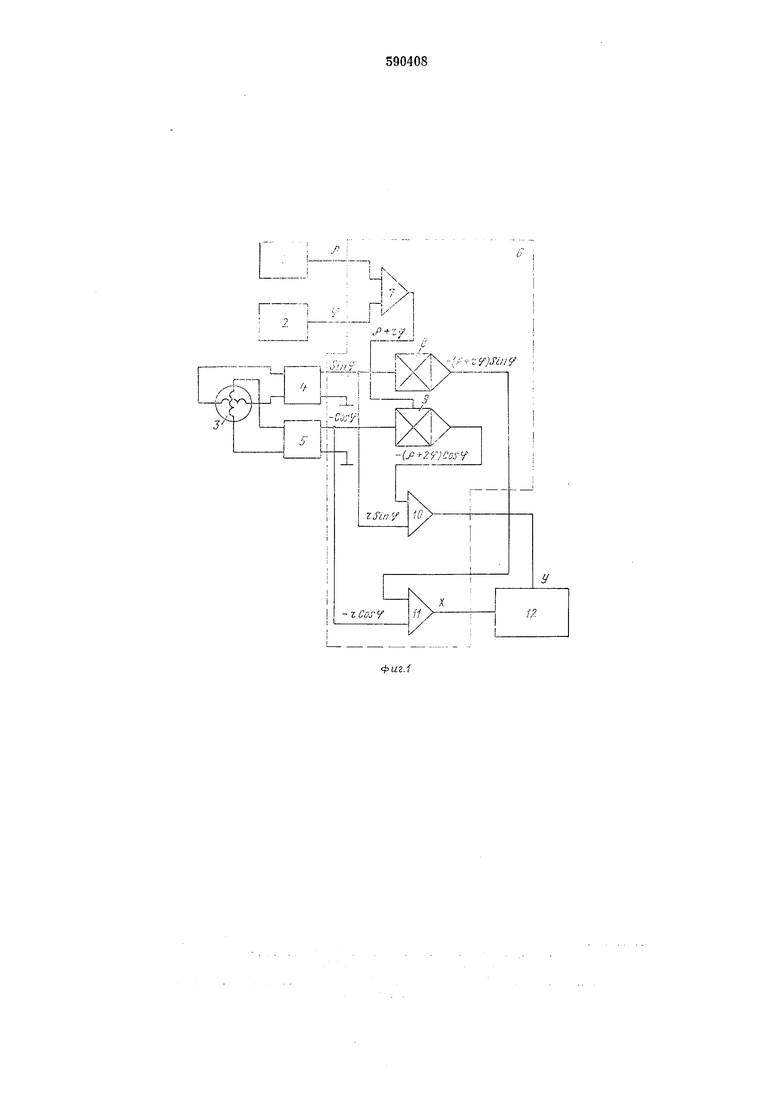
На фнг. 1 нредставлена схема предлагаемого устройства для записи траектории движения зубьев KOBHia; на фпг. 2 - координатная система траектории движения зубьев ковша.
VcTpoiicTBo для записи траектории движения зубьев KOBHia включает в себя датчик вылета рукояти 1. датчик угла наклона рукояти 2, сннусно-косинусный трансформатор 3, синусная обмотка которого соединена с выпрямительным мостом 4, а косинусная oб ioтка - с выпрямительным мостом 5, датчнк (блок) координат положення зубьев ковша 6, включаюн:ий первый сумматор 7, первьп
блок перемножения 8, второй блок перемножения 9, второй сумматор 10, третий сумматор 11, и двуххоордннатный самопншущнй нрибор 12.
Датчик вылета рукояти 1 жестко соединен с выходным валом нанорного редуктора, прнчем напряжение на выходе этого датчика нропорционально вылету рукояти, находящейея в вертикальном ноложении. Датчик угла наклона рукояти 2 представляет собой однооборотный потенциометр, подвижная часть которого крепится к седловому подшипнику еоосно с осью вращения рукояти, а неподвижная часть жестко соединяется со стрелой экскаватора. Напряжение на выходе датчика угла наклона рукояти пропорционально произведению радиуса напорного вала и угла иаклоиа рукояти. Ротор сииуснокосииусного трансформатора 3 крепится к седловому подшипнику рукояти соосио с осью ее вращения, а статор жестко закрепляется на стреле экскаватора. Синусная и косииусиая обмотки вращаюндего трансформатора подключены соответственно к выпрямительным мостам 4 и о.
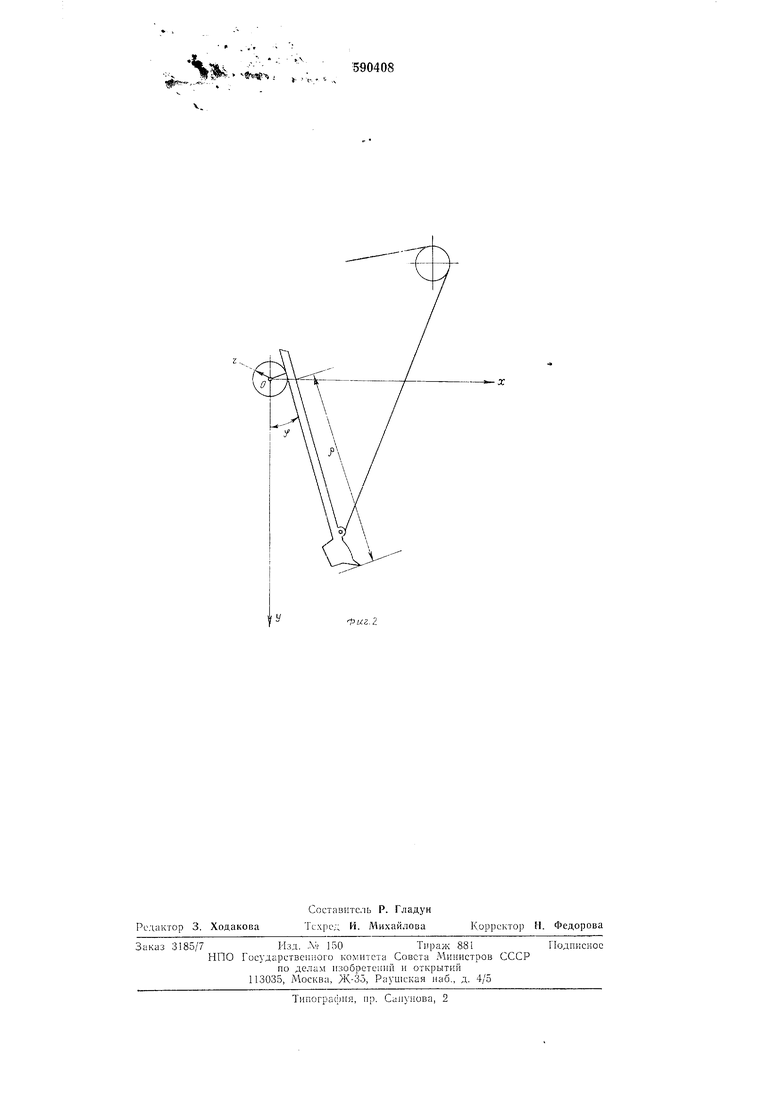
Напряжение с датчиков вылета рукояти 1 и угла ее наклона, а также с выпрямительных мостов 4 и 5 поступают на датчик координат положеиия зубьев ковша 6. Датчик коордииат положения зубьев ковша вычисляет сигналы, пропорииональиые координатам ;с и у (см. фиг. 2), согласно следующнх выражений:
x(j-{- г(р) sin -f -f г cos 9 у (у + r-f) cos f - г sin ,
1де р - вылет рукояти при вертикальном ее П(),т()1 еиии;
г - радиус вала, вокруг которого обкатывается рукоять;
ср - угол иаклоиа рукояти. Эти выражения получены путем геометрических преобразований. В первом сумматоре 7 суммируются напряжения, пропорциональные вылету рукояти р и произведеиню радиуса иапориого вала на угол наклона рукояти. Напряжение с первого сумматора 7, пропорциональное сумме (p+ф) поступает на первый и второй блоки перемножения 8 и 9, к другим входам которых подается соотзетственно напряжение, нропорциональиое Sincp и Coscp. С выхода первого миожительного устройства напряжение, пропорциональное (р+ Н-Гф) 51пф, поступает на третий сумматор
11, где суммируется с сигналом, пропорцнонпльным /Cosqi. Напряжение на выходе третьего сумматора И, нронорциональио координате к. С выхода второго блока перемиожения 9 иапряжение, пропорциональное (р 4-гф) Созф, поступает на вход второго сумматора 10, напряжеине на выходе которого пропорционально (р-г/ф) Со5ф-г51пф, т. е. координате у.
Напряження, пропорциоиальные координатам X и у, иодаются иа соответствующие входы двухкоординатиого самопишущего прибора 12, перо которого вычерчивает траекторию движення зубьев ковша.
Иснользоваиие предлагаемого устройства для записи траектории движения зубьев ковша одноковшового экскаватора позволяет оператиБИо получать иепосредственно траекторию движения ковша, что сокращает время эксперимента и позволяет корректировать движеиие ковша во время рабочего цикла.
Ф о р м у л а изобретен и я
1. Устройство для заииси траекторий движення зубьев ковша одноковшового экскаватора, включающее -датчик угла наклона, симусио-косинуеный трансформатор, связанный с двумя выпрямительными мостами, и регистрирующий прибор, отличающееся тем, что, с целью повышеиия точности записи, оно снабжено датчиком вылета рукояти и блоком вычисления координат положения ковша, к входам которого подключены выходы датчиков угла наклона и вылета рукояти и выходы выпрямительных мостов, а к выходам - регистрирующий прибор.
2. Устройство но п. 1, о т л и ч а ю Hie ее я тем, что блок вычисления координат иоло/кения KOiiHia в виде трех сумматоров и двух блоков перелгчожеиия, к входам которых подключены выходы первого сумматора,
а к выходам- входы двух других сумматоров.
PIcToqHHKH информации, иринятые во внимание при экспертизе
1. Полтава Г1. Н. ir Крюков Д. К. Методика измерения неэлектричееких Р.елнчин при исследовании одноковшовых экскаваторов. «Известия ДГИ, Т. 43. «Недра, 1964. 2. Авторское свидетельство СССР Л1 338595,
кл. Е 02F 9/20, 1970.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для защиты стрелы экскаватора | 1986 |
|
SU1416624A1 |
| Устройство для защиты стрелы экскаватора | 1989 |
|
SU1649106A2 |
| Устройство для измерения загрузки ковша экскаватора | 1983 |
|
SU1145099A1 |
| Способ управления копающими механизмами экскаватора и устройство для его осуществления | 1982 |
|
SU1105577A1 |
| УСТРОЙСТВО для ИЗМЕРЕНИЯ ЗАГРУЗКИ КОВША ОДНОКОВШОВОГО ЭКСКАВАТОРА | 1973 |
|
SU380800A1 |
| Устройство для автоматического управления экскаватором | 1977 |
|
SU692950A1 |
| Рабочее оборудование экскаватора | 1986 |
|
SU1435718A1 |
| Способ управления копающими механизмами экскаватора в транспортном режиме | 1985 |
|
SU1240839A1 |
| УСТРОЙСТВО для УПРАВЛЕНИЯ ОДНОКОВШОВЫМ ЭКСКАВАТОРОМ | 1971 |
|
SU308153A1 |
| Устройство для измерения глубины копания экскаватора | 1973 |
|
SU684102A1 |