Изобретение относится к устройствам управления землеройными машинами и может быть использовано, например, при построениисистемуправленияэкскаваторами и манипуляторами.
Цель изобретения - расширение функциональных возможностей устройства, обеспечивающего разработку траншеи под требуемым углом наклона к горизонту.
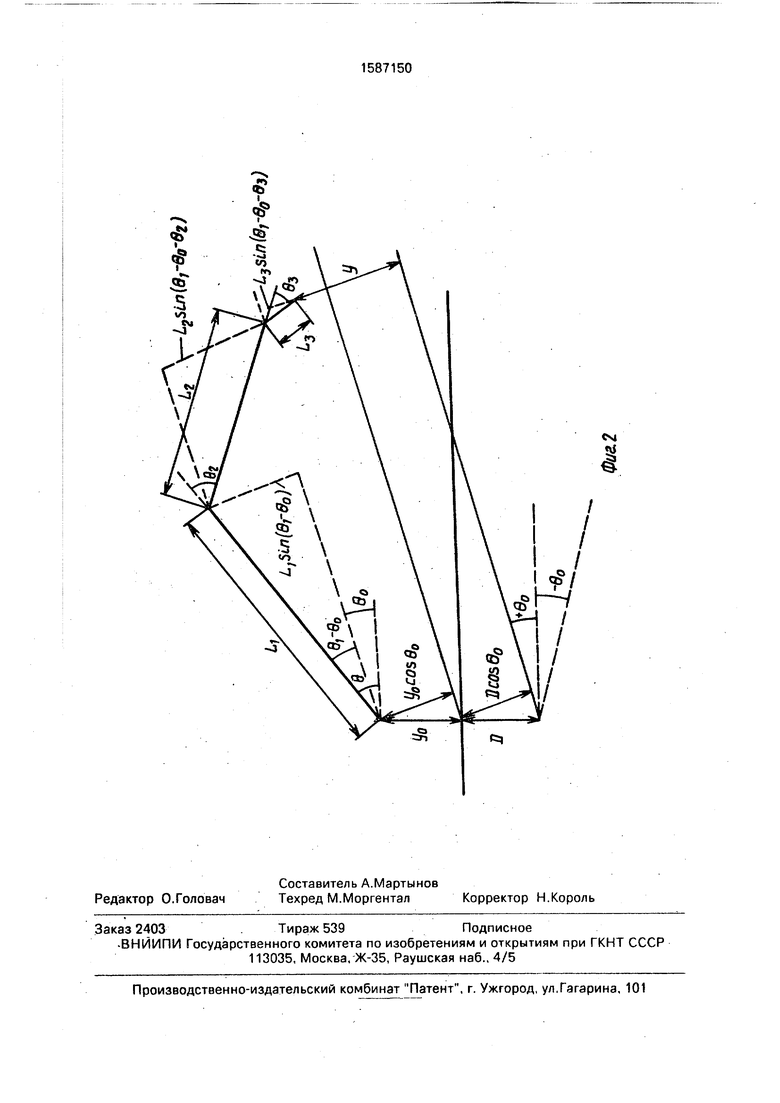
На фиг. 1 дана структурная схема устройства; на фиг. 2 - кинематическая схема рабочего оборудования.
Устройство {фиг. 1) содержит элементы 1 - 3 рабочего оборудования, стрелу, рукоять, ковш, датчики 4 - 6 определения угла взаимного расположения рабочего оборудования, элементы 7-9 гидропривода соответствующего рабочего оборудования, задатчики 10 - 12 длин рабочего оборудования, синусные преобразователи 13-15, сумматоры 16 - 19, задатчик 20 требуемой глубины копания, выключатель 21, задатчик 22 высоты точки подвеса рабочего оборудования, задатчик 23 требуемого наклона траншеи и косинусный преобразователь 24. На схеме (фиг. 2) показаны длины LI стрелы, L2 рукояти и U.ковша, угол 0i наклона стрелы к горизонту, угол 02 -между стрелой и рукоятью, угол бз между рукоятью и
осью ковша.
Величина рассогласования между заданной и текущей глубиной копания вычисляется, по формуле
Y-YoCos6D+Lisin(0i -ft)+
+L2Sin(0i -Q) +L3sm(0i -во-02 -бз)+0созаз, где YO - высота до точки подвеса рабочего оборудования;
D - требуемая глубина копания;
6 0-угол наклона траншеи к горизонту.
Устройство управления глубиной копания землеройной машины (фиг. 1) содержит элементы 1 - 3 рабочего оборудования, последовательно соединенные друг с другом с возможностью вращения, датчики 4-6 взаимного расположения элементов рабочего оборудования, элементы 7-9 гидропривода рабочего оборудования, задатчики 10-12 длин элементов рабочего оборудования, синусные преобразователи 13-15, алгебраические сумматоры 16-19, задатчик 20 требуемой глубины копания, выключатель 21, задатчик 22 высоты точки подвеса рабо- чего оборудования, задатчик 23 требуемого наклона траншеи и косинусный преобразователь 24.
В шарнире первого элемента 1 рабочего оборудования (стрелы), управляемого элементом 7 гидропривода, установлен датчик 4 поворота стрелы относительно машины, выход которого соединен с положительным входом алгебраического сумматора 16. от- рицательный вход которого соединен с выходом задатчика 23 требуемого угла наклона траншеи, а его выход - с входом синусного преобразователя 13 и положительным входом сумматора 17, 0т- 0 рицательный вход сумматора 17 соединен с выходом датчика 5 поворота элемента 2 рабочего оборудования, для поворота которого относительно элемента 1 рабочего оборудования применяется элемент 8 гид- 5 ропривода. Выход сумматора 17 соединен с . входом синусного преобразователя 14 и положительным входом сумматора 18. Отрицательный вход сумматора 18 соединен с выходом датчика 6 поворота элемента 3 ра- 0 бочего оборудования, для поворота которого относительно элемента 2 рабочего оборудования применяется элемент 9 гидропривода. Выход сумматора 18 соединен с входом синусного преобразователя 15. Вы- 5 ходы синусных преобразователей 13-15 соответствен но соединены с входами задат- чиков 10-12 элементов рабочего оборудования. Выход задатчика. 23 требуемого наклона соединен также с входом косинус- 30 ного преобразователя 24, выход которого соединен с входами задатчика 22 высоты подвеса рабочего оборудовани ч и задатчика 20 требуемой глубины копания. Выходы за- датчиков 10-12, 22 и 20 соединены с входа- 35 ми алгебраического сумматора 19, выход которого через выключатель 21 соединен с входом элемента 7 гидропривода элемента 1 рабочего оборудования.
Устройство работает следующим обра40 зом.
Устройство может быть установлено на экскаваторе, при этом длины элементов-рабочего оборудования (стрелы, рукояти и ковша) устанавливаются при монтаже
45 оборудования с помощью задатчиков 10-12. Перед разработкой траншеи оператор устанавливает на задатчике 20 требуемую глубину копания в точке стоянки, на задатчике 22 - высоту точки подвеса.рабочего
50 оборудования над грунтом, на задатчике 23- требуемый угол наклона траншеи.
Далее оператор с помощью элемента 8 гидропривода приводит в движение эле- мент 2 рабочего оборудования.
При этом вырабатываемый датчиком 5 сигнал 92 суммируется с сигналами датчиков 4 и и ft, расположенных в шарнирах элементов рабочего оборудования, и
сигналом с эадатчика 23 требуемого угла наклона на сумматорах 16-18. При этом на выходах сумматоров соответственно вырабатываются сигналы 01-, 01-66-6.1-6Ь-ft-6Ь, ко- торые поступают на входы синусных преобразователей 13-15. Сигналы с выходов синусных преобразователей и косинусного прЬобразователя 24 делятся пропорционально длинам элементов рабочего оборудования, высоте точки подвеса рабочего оборудования и требуемой глубине копания в точке стоянки на задат- чиках 10-12, 20 и 22 и поступают на входы алгебраического сумматора 19, где , сумми- руясь, образуют сигнал рассогласования Y, который через выключатель 21 управляет элементом 7 гидропривода стрелы 1 таким образом, что в результате изменения показания датчика наклона стрелы рассогласо- вание стремится к О, что соответствует требуемой глубине копания.
Формула из об р е т е н и я Устройство управления глубиной копания землеройной машины, состоящее из первого датчика угла взаимного поворота элементов рабочего оборудования, второго датчика угла взаимного поворота элементов рабочего оборудования, выход которого соединен с отрицательным входом первого сумматора, второй вход которого соединен с входом первого синусного преобразователя, а выход соединен с входом второго синусного преобразователя и положительным входом второго сумматора, отрицательный
вход KOTOpcwo соединен с выходом третьего датчика угла взаимного поворота элементов рабочего оборудования, а выход соединен с входом третьего синусного преобразователя, выходы синусных преобразователей соединены с входами задатчиков длин элементов рабочего оборудования, выходы которых соединены с положительными входами третьего сумматора, выходы задатчика требуемой глубины копания и задатчика высоты точки подвеса рабочего оборудования соединены с другими положительными входами третьего сумматора, выход которого через выключатель соединен с входом элемента электропривода поворота первого элемента рабочего оборудования, отличающееся тем, что, с целью расширения функциональных возможностей устройства, обеспечивающего разработку траншеи под требуемым углом наклона к горизонту, в систему введены задатчик угла наклона траншеи, четвертый сумматор и косинусный преобразователь, при этом выход задатчика наклона траншеи соединен с входом косинусного преобразователя и с отрицательным входом четвертого сумматора, положительный вход которого соединен с выходом первого датчика угла взаимного поворота элементов рабочего оборудования, а выход соединен с входом первого синусного преобразователя, выход косинусного преобразователя соединен с входом задатчика высоты точки подвеса рабочего оборудования и с входом задатчика требуемой глубины копания в точке стояния.
CM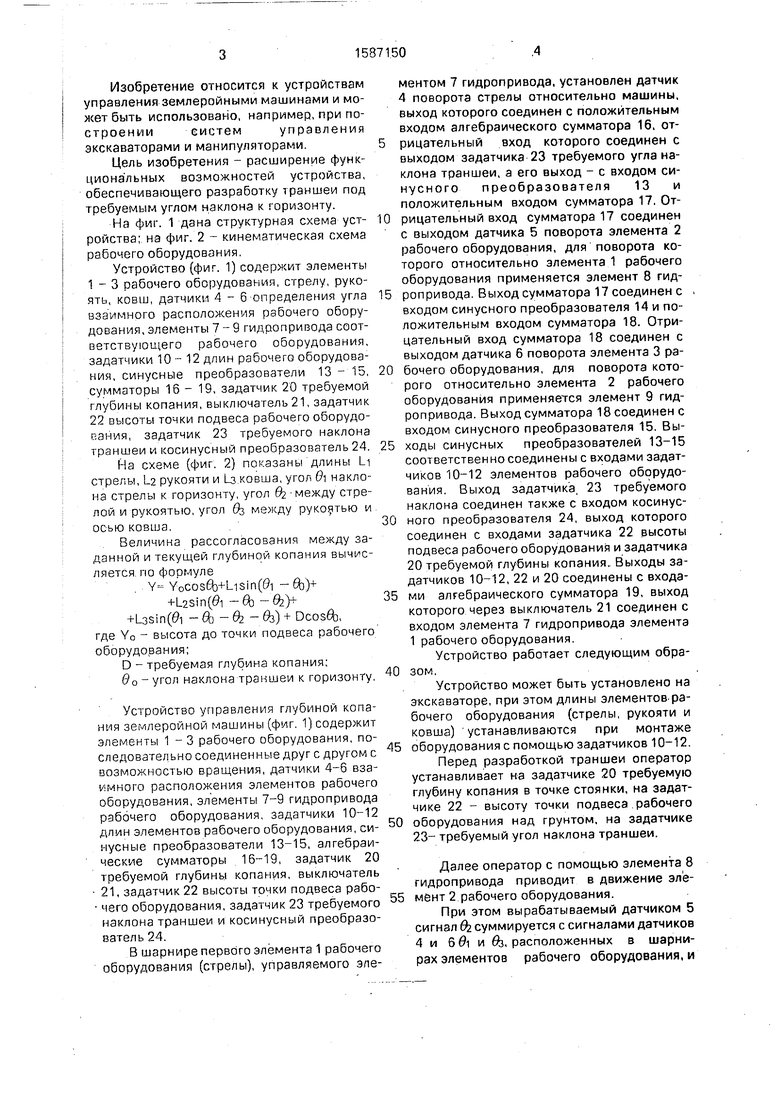
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ определения высоты точки подвеса рабочего оборудования землеройной машины после ее переезда относительно дна разрабатываемой траншеи с продольным уклоном | 1989 |
|
SU1740570A1 |
| Система управления глубиной копания землеройной машины | 1988 |
|
SU1661302A1 |
| Устройство для автоматического управления экскаватором | 1977 |
|
SU692950A1 |
| Устройство для автоматического регулирования положения ковша гидравлического экскаватора | 1988 |
|
SU1587149A1 |
| Устройство для управления гидравлическим экскаватором | 1989 |
|
SU1778249A1 |
| Устройство для защиты стрелы экскаватора | 1986 |
|
SU1416624A1 |
| Устройство для автоматического регулирования положения ковша гидравлического экскаватора | 1985 |
|
SU1258958A1 |
| Система для определения глубины копания одноковшовым экскаватором | 1987 |
|
SU1476082A1 |
| Устройство для управления экскаватором типа "прямая лопата | 1983 |
|
SU1113490A1 |
| Гидропривод управления экскаваторным оборудованием | 1978 |
|
SU768896A1 |
Изобретение относится к автоматическому управлению землеройными машинами. Цель изобретения - расширение функциональных возможностей устройства обеспечивающего разработку траншей под требуемым углом наклона к горизонту. Устройство состоит из датчиков 4-6 взаимного поворота элементов рабочего оборудования (РО) экскаватора, стрелы 1, рукояти 2 и ковша 3, элементов 7-9 гидропривода РО, задатчиков 10-12 длины РО, синусных 13-15 и косинусного 24 преобразователей (П), сумматоров (С) 16-19, выключателя 21 и задатчиков требуемой глубины касания 20, точки подвеса РО над грунтом 22 и требуемого наклона 23 траншеи. Сигнал с датчика 5 суммируется с сигналами датчиков 4 и 6 и сигналом задатчика 23 на С 16, 17 и 18. С выходов С 16-18 сигналы поступают на входы синусных П 13-15. Выходные сигналы П 13 и 15 и косинусного П 24 делятся пропорционально длинам элементов РО, высоте точки подвеса РО и требуемой глубине касания в точке стоянки на задатчиках 10-12, 20, 22 и поступают на входы С 19. Сигнал рассогласования с выхода С 19 через выключатель 21 управляет элементом 7 гидропривода стрелы 1. Рассогласование, равное нулю, соответствует требуемой глубине копания. 2 ил.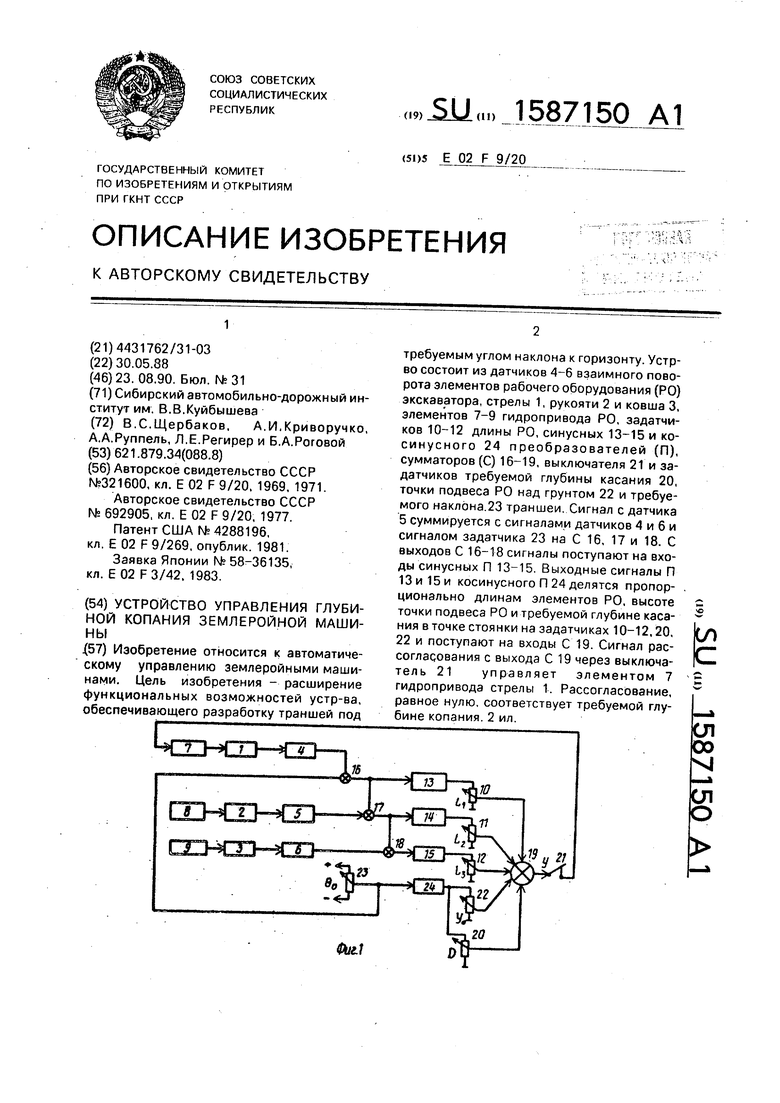
| 0 |
|
SU321600A1 | |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Способ термической обработки заэвтектических сплавов системы алюминий кремний | 1977 |
|
SU692905A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Патент США № 4288196, кл | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Приспособление для изготовления в грунте бетонных свай с употреблением обсадных труб | 1915 |
|
SU1981A1 |
| Способ окисления боковых цепей ароматических углеводородов и их производных в кислоты и альдегиды | 1921 |
|
SU58A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
