1
Изобретение относится к области автоматического управления и может быть использовано, в частности, в запоминающих устройствах на сменных магнитных дисках.
Известно устройство для шагового перемещения магнитных головок, содержащее последовательно соединенные усилитель, триггер Шмитта, блок дискретного управления, блок формирования сигнала грубого поиска, привод, каретку и измеритель-преобразователь, выход которого соединен со входом усилителя.
Цель изобретения - повышение точности, быстродействия и устойчивости работы устройства, а также уменьшение его габаритов.
Для этого предложенное устройство дополнительно содержит три усилителя и три ключа, выход первого из которых соединен с другим входом привода, а входы подключены соответственно к другому выходу блока дискретного управления и выходу первого дополнительного усилителя, входы которого соединены с выходами соответственно второго и третьего ключей, первые входы которых соединены с выходом триггера Шмитта, другие входы второго и третьего ключей соединены с выходами соответственно второго и третьего дополнительных усилителей, входы которых подключены к соответствующим выходам измерителя-преобразователя.
Измеритель-преобразователь содержит три источника света, оптически соединенные через прозрачные растры подвижной и неподвил ной шкал со входами соответствующих фоточувствительных элементов, выходы которых подключены к соответствующим выходам измерителя-преобразователя, со входом которого соединена подвижная шкала.
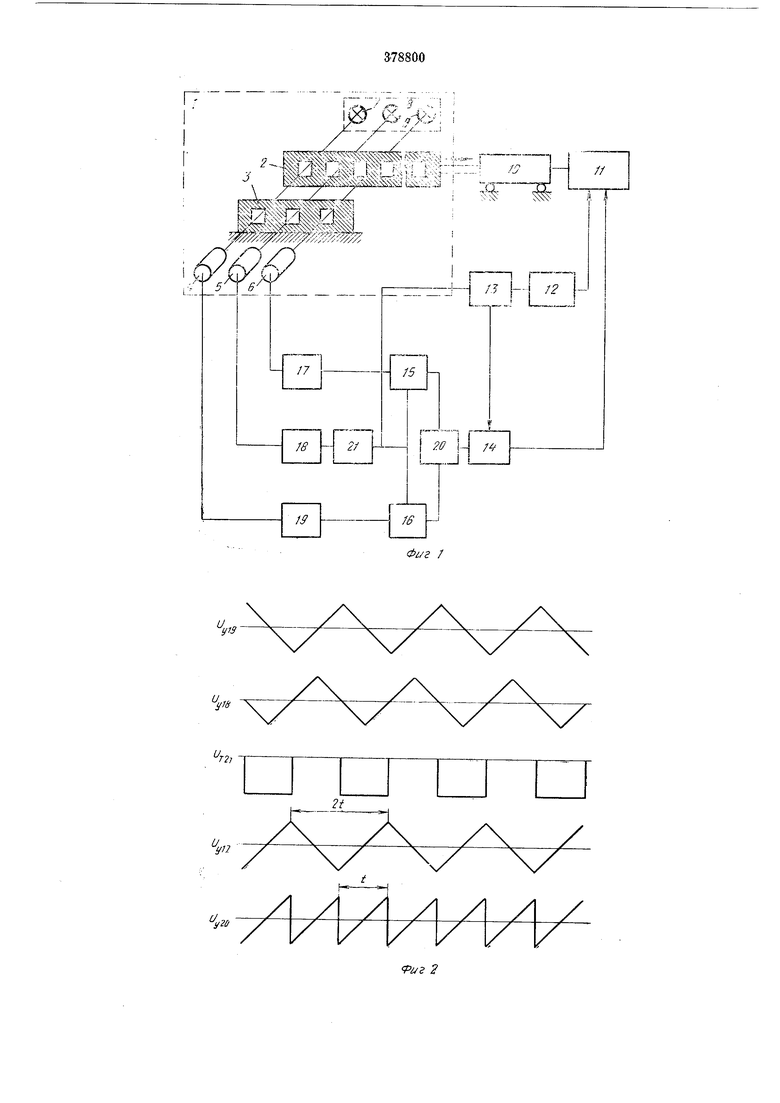
На фиг. 1 представлена блок-схема устройства; на фиг. 2 - диаграмма сигналов.
Блок-схема устройства содержит измеритель-преобразователь /, состоящий из подвижной шкалы 2, неподвижной шкалы 3, фоточувствительных элементов 4-6 и источников света 7-9, каретку 10, привод /У, блок 12
формирования сигнала грубого поиска, блок
13 дискретного управления, ключи 14-16,
усилители 17-20 и триггер Шмитта 21.
На диаграмме сигналов (см. фиг. 2) приняты следующие обозначения: U,./g-сигнал на выходе усилителя 19, Uyis- сигнал на выходе усилителя 18, Ursi-сигнал на выходе триггера 21, Uyi7-сигнал на выходе усилителя 17, Uijio-сигнал на выходе усилителя 20.
При движении каретки на новый адрес в начале каждого шага позиционирования изменяется потенциальный уровень выхода триггера Шмитта на противоположный.
Сигналы с триггера подаются на вход блока 13, в котором в моменты опрокидывания 3 триггера вырабатываются импульсы, служащие для счета пройденных шагов позиционирования, В зависимости от расстояния позиционируемых элементов до адреса по командам от блока 13 в блоке 12 вырабатываетсяэ управляющий сигнал, который подается в привод. При достижении начала заданной дорожки позиционирования автоматически отключается блок 12 и через ключ 14 к приводу подключается схема точного поиска. При10 движении подвижной щкалы относительно неподвижной периодически изменяется освещенность фоточувствительных элементов, на выходах которых появляются сигналы, сдвинутые один относительно другого по фазе на 90°.15 Эти сигналы усиливаются соответственно усилителями 17-19. Сигнал усилителя 19 поступает на ключ 16, а сигнал с усилителя 17- на ключ 15. Сигнал с усилителя 18 поступает в триггер20 Шмитта 21, на выходе которого появляется сигнал Ursi в виде потенциальных уровней, изменяющихся при переходе позиционируемых элементов блока магнитных головок с одной дорожки позиционирования на другую.25 При этом сигнал триггера Шмитта используется как управляющий сигнал для ключей 15 и 16. Ключ 16 срабатывает от низкого потенциала, а ключ 15 - от высокого потенциала, поочередно пропуская сигналы фоточув-30 ствительных элементов 4 и 6, и формируя таким образом на выходе усилителя 20 напряжение, прямо пропорциональное отклонению позиционируемых элементов от центра дорожки, что позволяет увеличить точность и35 устойчивость устройства. Сдвиг по фазе на 90° выходных сигналов фоточувствительных элементов достигается тем, что прозрачные и непрозрачные растры подвижной шкалы по ширине равны шагу по-40 зиционирования устройства, а неподвижная шкала имеет три прозрачных растра, ширина которых равна шагу позиционирования уст4ройства и которые сдвинуты друг относитель,, , , 1 , «« на расстояние S nt+-t. где п число, а -шаг позиционирования c.гr owcтna Предмет изобретения 1. Устройство для шагового перемещения магнитных головок, содержащее последовательно соединенные усилитель, триггер Шмитта, блок дискретного управления, блок формирования сигнала грубого поиска, привод, каретку и измеритель-преобразователь, выход которого соединен со входом усилителя, отличающееся тем, что, с целью повышения точности, быстродействия и устойчивости работы устройства, оно дополнительно содержит три усилителя и три ключа, выход первого из которых соединен с другим входом привода, а входы подключены сответственно к другому выходу блока дискретного управления и выходу первого дополнительного усилителя, входы которого соединены с выходами соответственно второго и третьего ключей, первые .входы которых соединены с выходом триггера Шмитта, другие входы второго и третьего ключей соединены с выходами соответственно второго и третьего дополнительных усилителей, входы которых подключены к соответствующим выходам измерителя-преобразователя. 2. Устройство по п. 1, отличающееся тем, что, с целью уменьшения габаритов устройства, измеритель-преобразователь содержит три источника света, оптически соединенные через прозрачные растры подвижной и неподвижной шкал со входами соответствующих фоточувствительных элементов, выходы которых подключены к соответствующим выходам измерителя-преобразователя, со входом которого соединена подвижная шкала.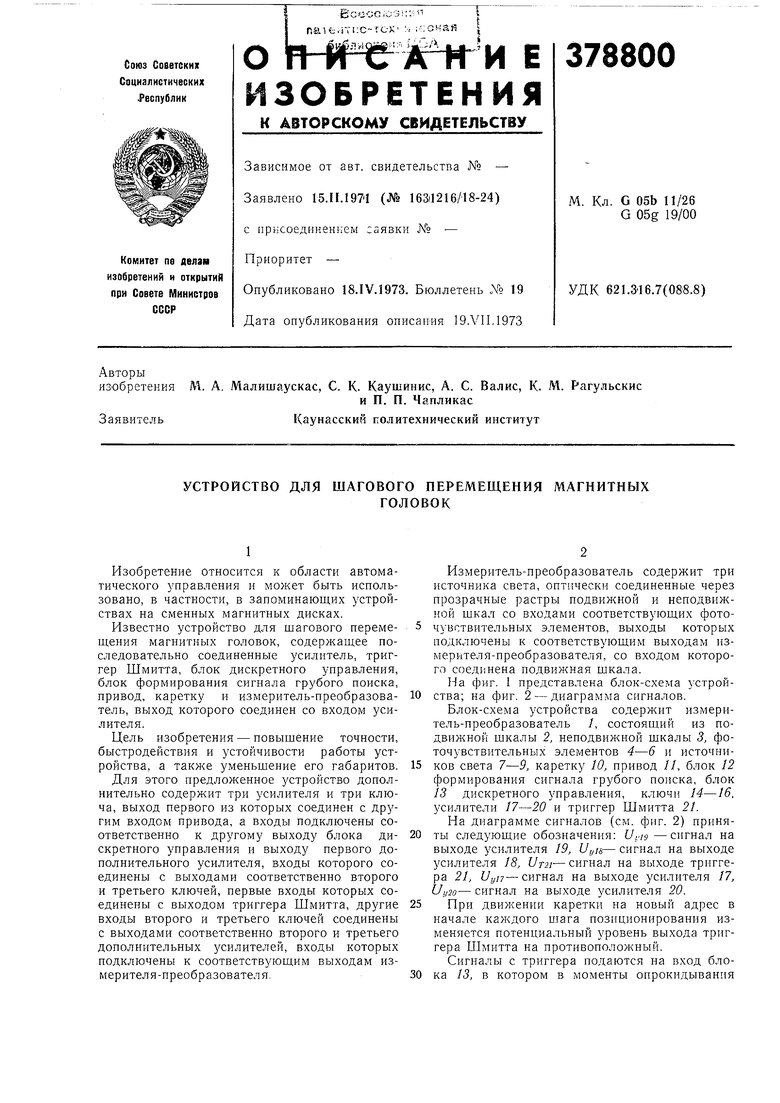
| название | год | авторы | номер документа |
|---|---|---|---|
| В П ТВ | 1973 |
|
SU408372A1 |
| Устройство для измерения нестабильности угловой скорости | 1981 |
|
SU1013854A1 |
| УСТРОЙСТВО для ШАГОВОГО ПЕРЕЛ1ЕЩЕНИЯ РАБОЧИХ ОРГАНОВ | 1972 |
|
SU326570A1 |
| УСТРОЙСТВО ДЛЯ ПОЛУЧЕНИЯ РАСТРИРОВАННЫХ | 1973 |
|
SU369756A1 |
| Устройство для позиционирования магнитных головок записи - воспроизведения | 1989 |
|
SU1679545A1 |
| Устройство позиционирования | 1980 |
|
SU930244A1 |
| Сервопривод для позиционирования | 1978 |
|
SU723504A1 |
| ЭЛЕКТРОННО-МЕХАНИЧЕСКИЙ ИЗМЕРИТЕЛЬ ЛИНЕЙНЫХ РАЗМЕРОВ | 1992 |
|
RU2075725C1 |
| Устройство позиционирования | 1979 |
|
SU830301A1 |
| ФОТОЭЛЕКТРИЧЕСКИЙ ПРЕОБРАЗОВАТЕЛЬ ПОЛОЖЕНИЯ | 1990 |
|
RU1795706C |