Изобретение относится к автоматике и предназначено для использования в сервоприводах разного назначения, на пример в сервоприводах оптических запоминающих устройств в автоматических координатографах в дисковых запоминающих устройствах. Известен сервопривод для позиционирования блока магнитных головок дисковых запоминающих устройств, сод жащий привод, каретку, блок управления , контур грубого поиска, контур обратной связи по скорости, включающ 1й в себя укрепленный на каретке датчик скорости, выход которого соединен с основным усилителем, и электр механический .фиксатор точного установления каретки в заданное положение li. Недостатком этого сервопривода является наличие электромеханическог фиксатора, который в процессе эксплу атации изнашивается,, и устройство теряет точность, причем время срабатывания такого фиксатора значительно, что увеличивает общее время пози ционирования. Известен сервопривод., для позицион рования (перемещения) магнитных голо вок, содержащий привод с кареткой, с которой связан циклический датчик положения, один выход которого подключен к первому входу основного усилителя через последовательно соединенные блок формирования счетных импульсов, логический блок управления и блок формирования сигнала грубого поиска, а другой выход - ко второму входу основного усилителя через последовательно соединенные блок формирования сигнала точного поиска и первый ключ, управляющий вход которого подключен к соответствующему выходу логического блока управления, и соединенный с кареткой датчик скорости, выход которого связан с третьим входом основного усилителя 23. Недостаток сервопривода - наличие колебательного процесса в концепозиционирования. Введением отрицательной обратной связи по скорости колебательность процесса уменьшается, однако быстроходность при этом не увеличивается. Это объясняется тем, что.и контурегрубого поиска необход иметь обратную-связь по скорости с малЕЛМ коэффициентом усиления, а в контуре точного поиска - обратную связь с ольшим коэффициентом усиления, увеличивающимся по мере перемещения рабочих органов к центру заданной позиции.
Целью изобретения является увеличение быстродействия сервопривода.
Цель достигается тем, что сервопривод для позиционирования содержит формирователь коэффициента обратной связи по скорости и последователно соединенные усилитель с управляемым -коэффициентом усиления и второй ключ, вьоход которого соединен с четвертым,входов основного усили-. теля, управляющий вход - с соответствующим выходом логического блока управления, вход усилителя с управляемым коэффициентом усиления связан с выходом датчика скорости, управляющий вход - с выходом формирователя коэффициента.обратной связи по скЬрости, вход которого подключен к выходу, первого ключа.
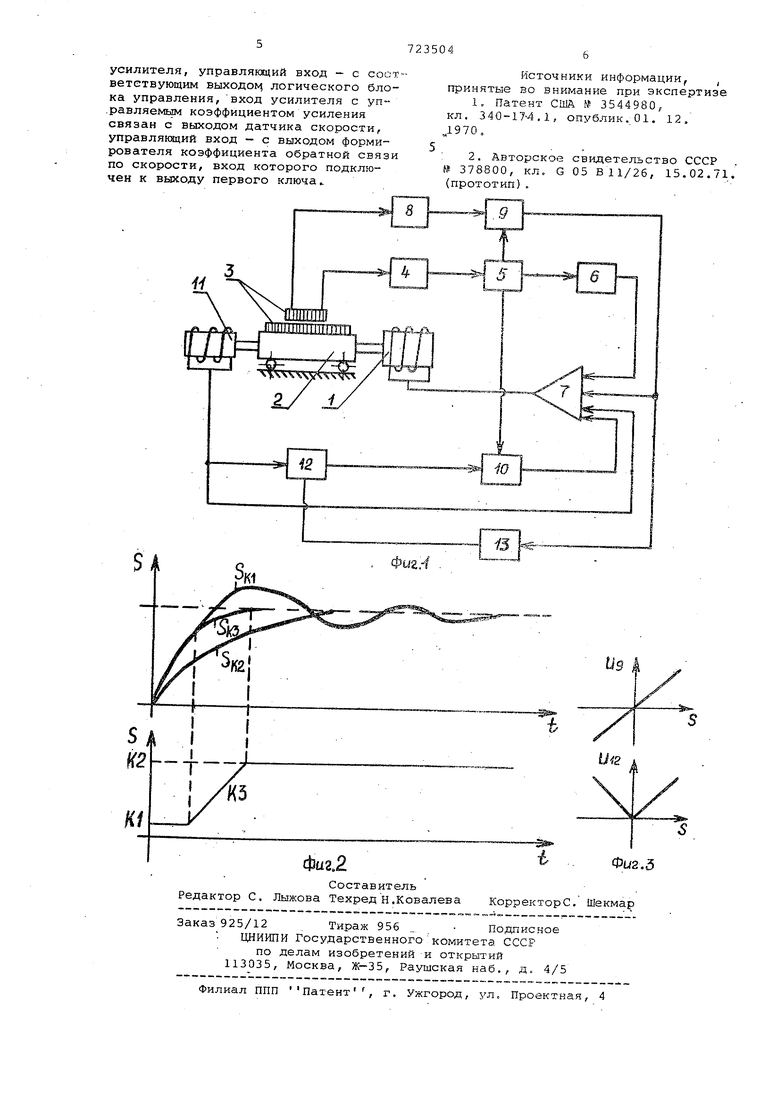
На фиг. 1 представлена блок-схема сервопривода для позиционирования на фиг. 2 и 3 - графики, поясняющие его работу.
Блок-схема сервопривода содержит привод 1, каретку 2, циклический датчик 3 положения, блок 4 формйро,вания счетных импульсов, логический блок 5 управления, блок 6 формирования сигнала грубого поиска, усилитель 7, блок 8 формирования сигналов точногопоиска, ключи 9 и 10, датчик 11 скорости, усилитель 12 с управляемым коэффициентом усиления и формирователь 13 коэффициента усиления обратной связи по скорости.
На диаграмме сигналов (фиг. 2 и 3) принятыследующие обозначения кривая перемещения каретки на новый адрес с малым коэффициентом усиления обратной связи по скорости К1, 3 кривая перемещения каретки с большим коэффициентом усиления обратной связи по скорости К2, S,,- кривая перемещения каретки с изменяющимся коэффициентом усиления обратной связи по скорости КЗ от величины К1 до К2, Ид - сигнал на выход ключа 9, - сигнал на выходе формирователя 12 коэффициента усиления обратной связи по скорости.
Устройство работает .следующим образом.
При движении каретки 2 на новый адре.с в начале каждого шага позиционирования, на выходе блока 4 формирования -счетных .импульсов;, выдаются счетные импульсы, поступающие на логический блок 5 управления (ЛБУ) и служащие для счета пройденных шагов позиционированияi В зависимости от расстояния позиционируемых элементов до адреса по командам от логического блока 5 управления в блоке 6 формирования сигнала грубого поиска (ФСГП) вырабатывается управляющи , который подается в привод.
При достижении начала заданной до.рожки позиционирования автоматически отключается блок б ФСГП и через ключ 9 к -цриводу подключается блок 8 формирования сигналов (ФСТП) точного
5 поиска. Сигнал с выхода блока 8 ФСТП подается и на формирователь 13 коэффициента усиления обратной связи по скорости (в качестве такого блока, например, может быть использован
Двухполупериодный выпрямитель), на выходе которого формируется напряжение, увеличивагадееся при удалении позиционируемых элементов от центра заданной позиции, который и подается на управляющий вход усилителя 12. На выходе усилителя14 формируется максимальный сигнал, если на управляющем входе потенциал равен нулю. Сигнал с датчика 11 скорости поступает на усилитель 7 через усилитель 12 и ключ 10, который открывается по команде от блока 5 (ЛБУ) при достижении начала заданной дорожки. В основном усилителе 8 су1 1мируются три сигнала: сигн.ал обратной связи по положению и два сигнала обратной связи по скорости, которые усиленными поступают в привод.
В процессе исследования построенной системы установлено, что благоQ даря исключению колебательного процесса в конце позиционирования увеличилась быстроходность позиционированияГпри больших перемещениях в 1,2 раза и около 4-5 раз при ма5 перемещениях.
ФормулаИзобретения
Сервопривод для позиционирования,
содержащий привод с кареткой, с которой связан циклический датчик положения, один выход которого подключен к первому входу основного усилителя через последовательно соединенные блок формирования счет-г ных Импульсов, логический блок управления и блок формирования сигнала грубого поиска, а другой выход; - ко второму входу
5Q основного усилителя через последовательно соединенные блок формирования сигнала точного поиска и первый ключ управляющий вход которого подключен к соответствующему выходу логическог
се блока управления, и соединенный с кареткой датчик скорости, выход которого связан с третьим входом основного усилителя, отличающийся тем, что, с целью увеличения быстродействия сервопривода, он
60 содержит формирователь коэффициента обратной связи по скорости и .последовательно соединенные усилитель с , управляемым коэффициентом усиления и второй ключ, выход которого соедиЙ5 кен с четвертым входом основного
| название | год | авторы | номер документа |
|---|---|---|---|
| В П ТВ | 1973 |
|
SU408372A1 |
| Устройство позиционирования | 1980 |
|
SU930244A1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ПОЛОЖЕНИЕМ ТРАВЕРСЫ ГИДРАВЛИЧЕСКОГО ПРЕССА | 1992 |
|
RU2006370C1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ДРОНОМ СОПРОВОЖДЕНИЯ ВОДОЛАЗА | 2017 |
|
RU2672505C1 |
| Устройство для управления движением транспортного средства | 1989 |
|
SU1735809A2 |
| Измерительный преобразователь неэлектрических величин с емкостным датчиком | 1990 |
|
SU1795381A1 |
| ЦИФРОВОЙ ЭЛЕКТРОПРИВОД | 2009 |
|
RU2404449C1 |
| Следящий электропривод редукторных механизмов с компенсацией люфта | 1986 |
|
SU1388825A1 |
| СИСТЕМА СОПРОВОЖДЕНИЯ ПОДВИЖНЫХ ОБЪЕКТОВ | 2008 |
|
RU2388010C1 |
| Устройство позиционирования | 1979 |
|
SU830301A1 |
