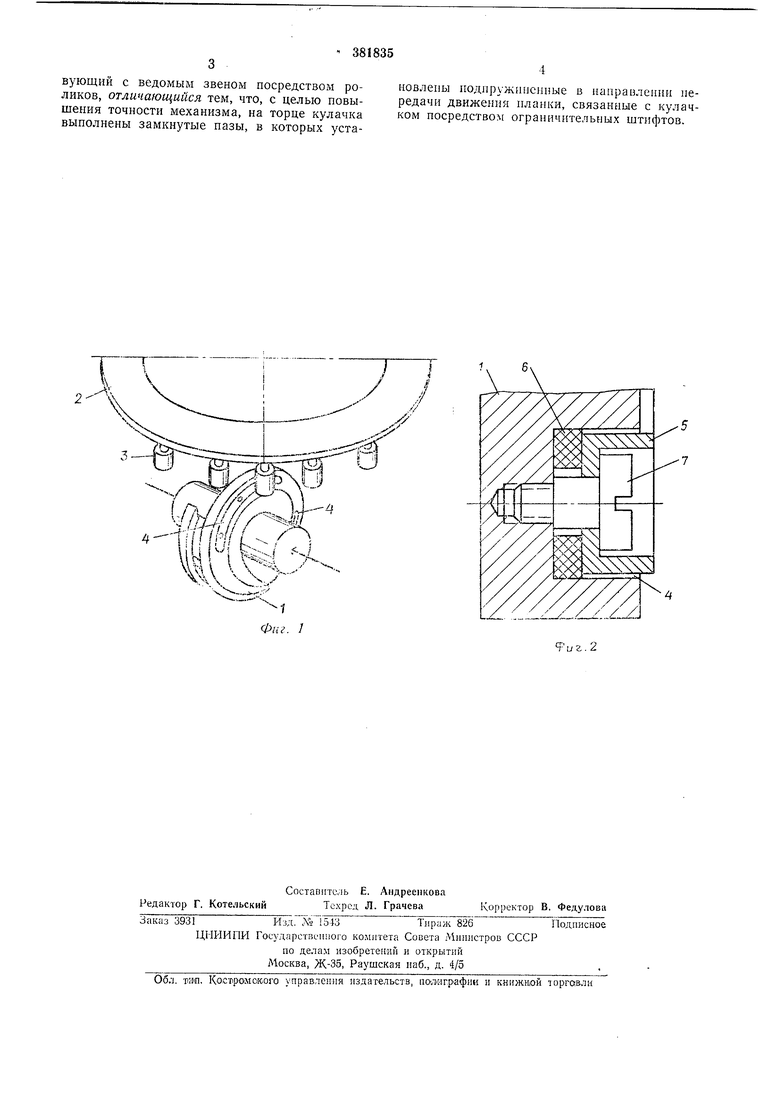
Изобретение относится к o6ui,e.iy машююстроению, а именно к конструкциям ку.чачково-роликовых механизмов. Известны кулачково-роликовые механизмы, содержащие пространственный кулачок, взанмодействующий с ведомым звeиo носредетвом роликов. Однако известные меха 1измы не обладают достаточной точностью. В предлагаемом механизме этот недостаток устранен нутем вынолнения на торце кулачка замкнутых назоБ, в которых установлены подпружиненные в направлении передачи движения планки, связанные с кулачком носредством ограничительных штифтов. На фиг. 1 представлена кинематическая схема описываемого кулачково-роликового мехаиизма; на фиг. 2 - узел крепления одной из плаиок к кулачку. Кулачково-роликовый механизм содержит пространственный кулачок 1, взаимодействуюш,ий с ведомым звеном 2 посредством роликов 3. На торце кулачка 1 выполнены замкнутые пазы 4, в которых установлены планки 5, подпруЛСинепные при помощи упруго-демпфирующего материала 6, например резины, и связанные с кулачком / посредством ограничительных штифтов 7 (см. фиг. 2). Кулачково-роликовый механизм работает следующим образом. При каждом обороте нростраиствеииого кулачка его переводящий паз входит в зацеиление с парой роликов 3, связаииых с ведомым звеиом 2. С ведомым звеиом 2 связана рабочая карусель (на чертежах не показана). В гнездах рабочей карусели располагают контролнруемые детали, иаиример нолунроводниковые приборы, иараметры которых необходимо залгерить с помощыо пзмерителыюго механиз ia, к которому должны иоджпматься в момент замера контролируемые детали. Продолл ительиость иахождеиия гиезд с контролируемыми деталями на рабочей позиции достигается выбором зазора между двумя роликами 3. Для этого перед включением кулачково-роликового мехаиизма в рабочий цикл на кулачке / подтягпвают или отпускают планки 5 г.ри иомони ограничительных штифтов 7. При работе ме.ханизма один нз роликов все время соприкасается с базовой новерхностыо гребня кулачка, обеснечнвая рабочей каруеели спокойный выетой, а контролируемым деталям - точное совмещение и падежный контакт с механизмом замера. Предмет изобретен и я Кулачково-роликовый механизм, содержащий пространственный кулачок, взаимодействующий с ведомым звеном посредством роликов, отличающийся тем, что, с целью повышения точности механизма, на торце кулачка выполнены замкнутые пазы, в которых уста4
новлепы подпружиненные в напраЕ леиин передачи движения иланки, связанные с кулачком посредством ограничительных штифтов.
| название | год | авторы | номер документа |
|---|---|---|---|
| Револьверная головка | 1983 |
|
SU1161263A1 |
| Устройство для подключения радиоэлектронных блоков | 1982 |
|
SU1083419A1 |
| Автомат для навивки пружин | 1980 |
|
SU895576A1 |
| Роторный автомат для сборки деталей запрессовкой | 1978 |
|
SU872171A1 |
| ПРУЖИНОНАВИВОЧНЫЙ АВТОМАТ, ЕГО МЕХАНИЗМЫ РУБКИ, ОБРАЗОВАНИЯ УЗЛА, ПЕРЕМЕЩЕНИЯ ЗАГОТОВОК (ВАРИАНТЫ), ИХ УСТРОЙСТВА ЗАХВАТОВ, ПОДВИЖКИ, ОРИЕНТАЦИИ, ЗАЖИМА, КУЛАЧКОВЫЕ СРЕДСТВА | 2002 |
|
RU2199412C1 |
| Автомат для изготовления биполярных электродов химического источника тока | 1980 |
|
SU877654A1 |
| Привод,преимущественно для устройства запрессовки штырей в плату | 1981 |
|
SU1075457A1 |
| Автомат для контроля деталей цилиндрической формы | 1986 |
|
SU1466815A1 |
| Автомат сборки внутренних звеньев втулочнороликовых цепей | 1981 |
|
SU958034A1 |
| Сборочная линия | 1985 |
|
SU1255352A1 |
Фиг. 2
