1
Известны подвесные захватные устройства автооператора линии фосфатирования цилиндрических иаделий, например труб, содержащ.ие держатели, поворотно смонтированные на траверсе с обоймами, между которыми установлено рычажно-клиновое приспособление с механизмом фиксации держателей и датчик верхнего положения траверсы.
Цель изобретения - повышение надежности работы устройства.
Для этого в предлагаемом устройстве механизм фиксации держателей выполнен в виде защелок, неподвижно закреплениых на оси и соединенных посредством шарнирных тяг с электромагнитом, смонтированным на одной из обойм, при этом электромагнит электрически связан с датчиком верхнего положения траверсы, а обоймы снабжены неподвижными упорами, взамодействующими с изделием.
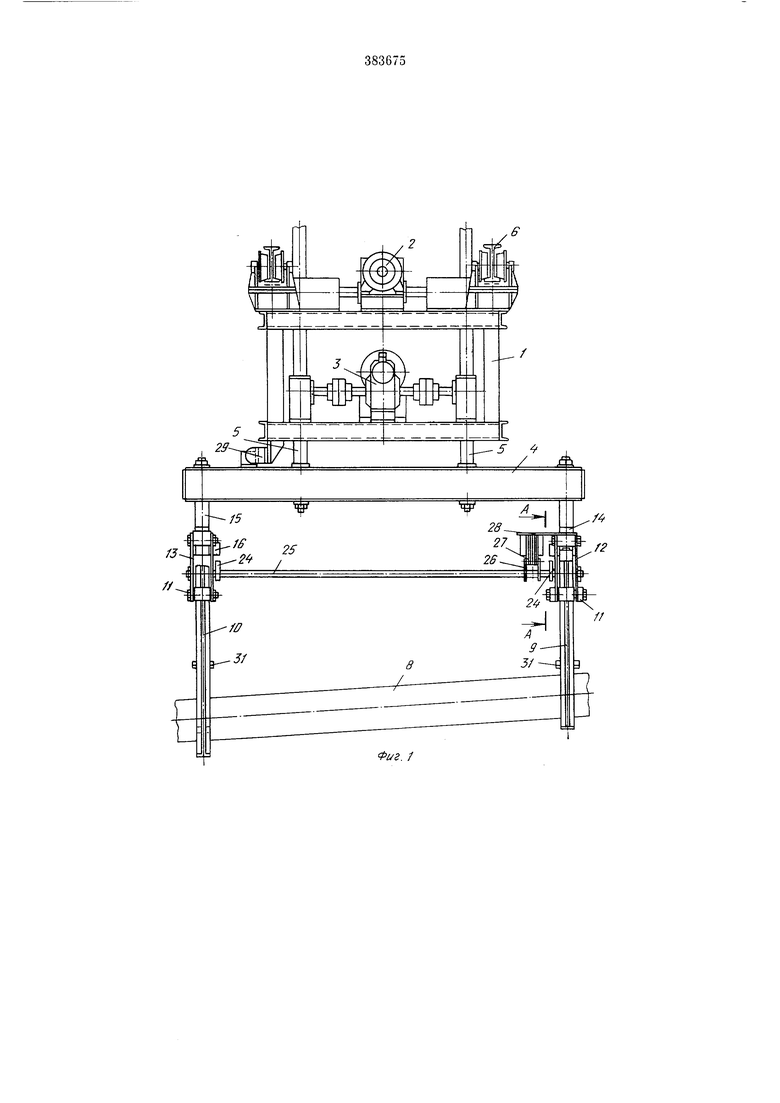
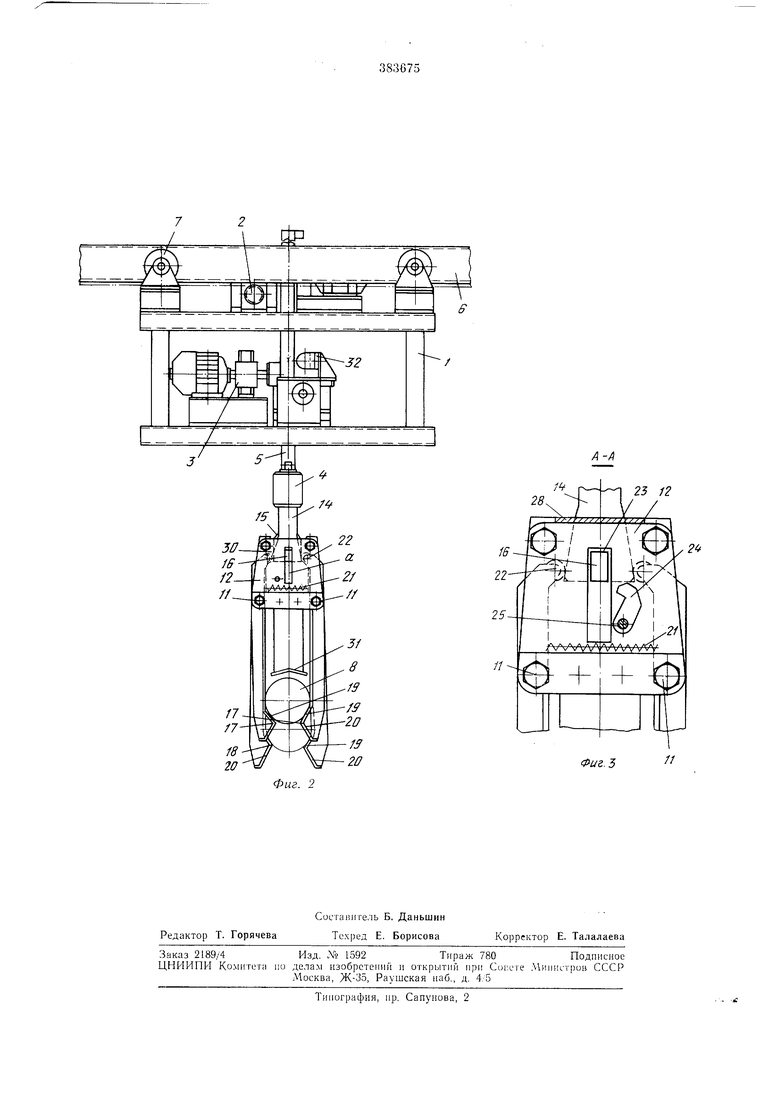
На фиг. 1 изображено описываемое устройство, вид спереди; на фиг. 2 - то же, вид сбоку; на фиг. 3 - сечевие по А-Л на фиг. 1.
Устройство содержит каретку / с механизMaiMH перемешепия 2, -подъема и олускания о и траверсу 4, подБешенную штаНГ-рей,ка1МИ 5 к 1 аре-Т1ке, .подвижнорасположеж-юй на путях 6 при помощи роликов 7. Рычажно-клиновое ирисиособление для захвата трубы 8 включает держатели 9 и 10 разной длины, установленные на шарнирах // и смонтированные
посредством обойм 12 и 13 и клиньев 14 и 15 на траверсе 4. Обоймы имеют вертикальные пазы а, а клинья - боковые направляющие выступы 16, входящие в пазы а.
Нижняя часть держателей 9 и 10 снабжена выступами 17 и 18 соответственно, причем BbiCTyiHbi 17 расположены выше, чем выступы 18. Выступы им-еют верхние 19 и нижние 20 уклоны. Каждая пара держа1телей состоит
из стягивающей .пружины 2/, которой ихверХние концы 22 поджимаются к клиньям. Выступы 16 имеют грани 23. На обоймах 12 и 13 установлен механизм фиксации держателей, выполненный в виде защелок 24, неподвижно закрепленных на оси 25 и соединенных шарнирными тягами 26 с электромагнитом 27, смонтированным на кронштейне 28 обоймы 12.
Устройство оснащено блоком управления с датчиком 29 верхнего положения траверсы 4, установленным на каретке /. Электромагнит 27 электрически связан с датчиком 29. Клин 15 в нижней части имеет параллельные грани 30, обеспечивающие зазоры между держателями 10 и трубой 8 при нижнем положении обоймы 13. Обоймы 12 и 13 снабжены упорами 31, расположенными на одинаковом уровне. На каретке установлен датчик 32
нижнего иоложения траверсы 4.
Работает устройство следующим образом.
Труба 8 па предлагаемом устройстве находится на ложементах в горизонтальном положении. По команде блока управления каретка /с помощью механизма 2 перемещена п передвигается по путям 6 до пересечения вертикальных осей захватного устройства с осью трубы 8. После остановки включается механизм 3, и траверса 4 на штангах-рейках 5 опускается в нижнее положение.
При движении вниз первоначально попарно расположенные держатели 10 нижними уклонами 20 выступов 18, а затем и держатели 9 уклонами 19 выступов 17 опираются на трубу 6. При этом клинья /5 и 14 двигаются относительно обойм 13 и 12, которые замедляют свое движение при обкатывании выступов 18 и 17 вокруг трубы 8, а верхние концы 22 держателей 10 и 9 скользят по клиньям 14 и 15. Выступы 16 вертикальными лазами направляют перемещение обойм 12 и 13. Под действием пружины 21 и уклонов 20 происходит раскрывание держателей 9 и 10.
После т Giro, KciiK упоры 31 достигаю трубы 8, а траверса 4 занимает крайнее нижнее положение, срабатывает датчик 32 блока унравления, и механизм 5 переключается на подъем. При подъеме траверсы 4 с клиньями 14 и 15 обоймы 12 и 13 под действием силь тяжести остаются на месте, а верхние конны 22 держателей 9 и /О екользят по клинья, тем самым сводят их нижние кипы пря одновременном повороте вокруг осей шарниров //. Короткие держатели 9 при дальиейигем подъеме траверсы 4 зажимают трубу В, которая одновременно с зажимом опирается на верхние уклоны 19 выступов 17. Пр|И этом верхние концы 22 держателей 9 зависают на клине 14, тем самым обеспечивая подъем захвата с трубой 8.
Сведение держателей 10 происходит аналогично держателям 9 с той лишь разницей, что в ииЖНей части клина 15 верхние концы 22 держателей 10 скользят по параллельным граням 30 до зависания обоймы 13 своими пазами а на верхней гранц бокового направляющего выступа клина 15, обеспемивания тем, самым сведение держателей 10 без зажима трубы 8 до момента ее подхвата верхними уклонами 19 выступов 18. Таким же образом происходит захвата трубы 8 в наклонном положении на любой технологической позиции автолишш, прн этом из наклонной трубы стекает раствор во время подъема. Траверса 4 с наклонной трубой 8 поднимается до момента срабатывания датчика 29, отключающего механизм подъема в крайнем верхнем положении траверсы 4.
Каретка / с Г1омощ| 1о блока управления и Mex3iHi:-Ma 2 11еред1зи1гается по путям 6 до первой технологической позиции линии фосфатирования труб, где остаиавливается. Включается опускание траверсы 4 механизмом 3 на ложементы ванны, в опущенный конец трубы 8 входит технологический раствор, а из приподнятого ее конца выходит воздух. По достижении ложементов ванны нижний конец трубы 8 опирается на один из них, а верхний конец продолжает опускаться с держателями 9 до соприкосновения с другим ложемешом ванны. труба 8 ложится в в.анну горизонтально, после чего упоры 31, опираясь на трубу 8, задерживают движение обойм 12 и 13. Нижние концы держателей под действием пружнны 21, вращаяеь на щарнирах 11, расходятся при движении клиньев 14 и 15 вниз. При опускании траверсы 4 в крайнее нижнее положение датчик 32 переключает механизм 3 на подъем. Одновременно с этим блок управления включает электромагнит 27 механизма фиксации раскрытого положения держателей 9 и 10. Защелки 24 тягами 26 и осью 25 зацепляются за верхние грани 23 выступов 16 и тем самым обеспечиваютподъем траверсы 4 с раскрытыми держателями, оставляя трубу 8 в ванне. По достижении верхнего крайнего положения траверсы 4 датчик 29 отключает механизм подъем и одновременно выключает электромагнит 27.
Под действием веса обойм 12 и 13 защелки 24 срываются с направляющим выступов 16 и обоймы с держателями 9 и 10 падают вниз по клиньям 14 и 15 до задержки обойм верхними гранями 23 выступов 16. При этом нижние концы держателей сходятея попарно.
Работа устройства по переносу труб на остальных технологических позициях аналогичiia описанной выще.
Предмет изобретения
Подвесное захватное устройство автооператора линии фосфатирования цилиндрических изделий, нанример труб, содержащее держатели, поворотно смонтированные на траверсе с обоймами, между которыми установлено рычажно-клиновое приспособление с механизмом фиксации держателей, и датчик верхнего положения траверсы, отличающееся тем, что. с целью повышения надежности работы, механизм фиксации держателей выполнен в виде защелок, иеподвижно закрепленных на оси и соединенных иосредством щарнцрных тяг с электромагнитом, смонтированным на одной из обойм, прн этом электромагнит электрически евязан с датчиком верхнего положения траверсы, а обоймы снабжены еподвижными упорами, взаимодействующими с изделием.
Фиг. /
23 12
28
11
//
Фиг.З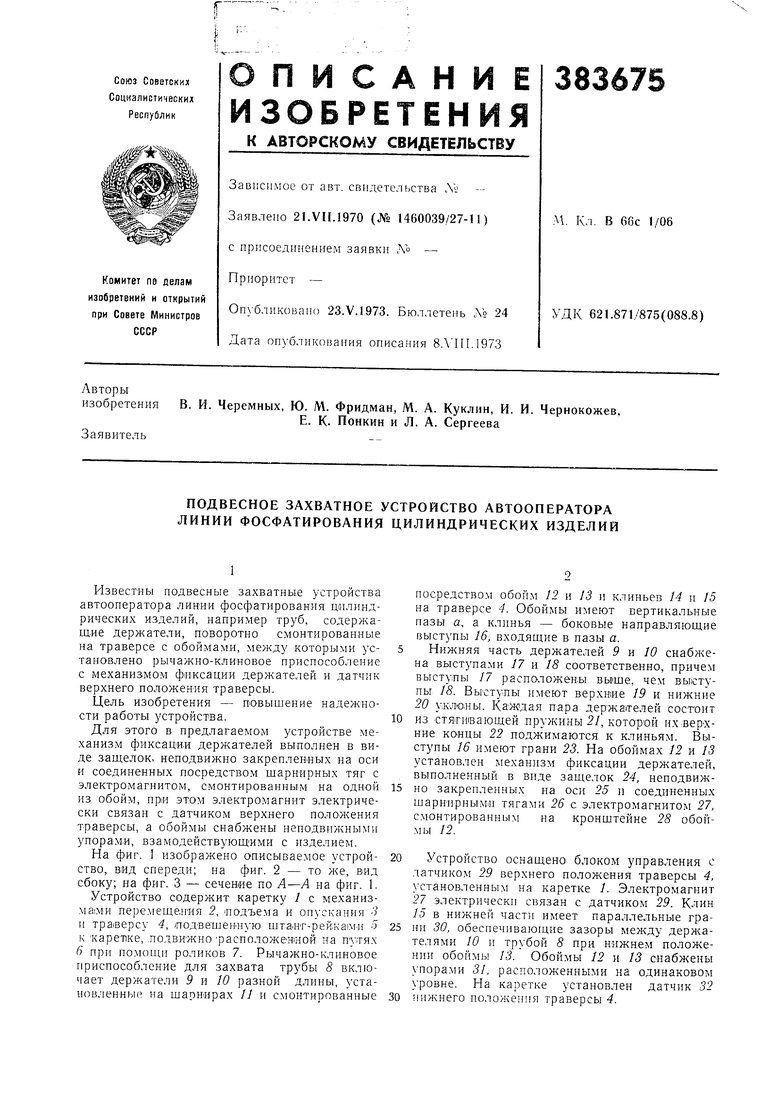
| название | год | авторы | номер документа |
|---|---|---|---|
| ЛЕНТОЧНО-ПИЛЬНЫЙ СТАНОК | 1998 |
|
RU2139182C1 |
| Грузозахватное устройство | 1986 |
|
SU1341142A1 |
| Грузозахватное устройство | 1990 |
|
SU1773846A1 |
| Грузозахватное устройство | 1986 |
|
SU1418268A1 |
| Автоматическое захватное устройство | 1971 |
|
SU549400A1 |
| Установка для мойки изделий | 1981 |
|
SU1107908A1 |
| Винтовой механизм | 1976 |
|
SU656959A1 |
| Автоматическая линия для изготовления деталей типа топоров | 1989 |
|
SU1727945A1 |
| ГРУЗОЗАХВАТНОЕ УСТРОЙСТВО С РЕГУЛИРУЕМОЙ В ЗАВИСИМОСТИ ОТ ПОЛОЖЕНИЯ ЦЕНТРА МАСС ГРУЗА ТОЧКОЙ ПОДВЕСА | 2007 |
|
RU2344986C1 |
| Автооператор для смены инструментальных наладок | 1986 |
|
SU1426744A1 |