1
Изобретение относится к области автоматического управления и может быть применено при автоматизации горных машин.
Известна пневмогидравлическая система программного управления, содержащая устройство цифрового считывания и цифровые задатчики и датчики обратной связи.
Однако такие системы сложно перенастраивать.
Предложенная пневмогидравлическая система программного управления содержит блок программы и последовательно соединенные исполнительный блок, потенциометрический датчик обратной связи, блок сравнения и блок логики, выходные каналы которого соединены с исполнительным блоком, и отличается тем1, что блок программы содержит потенциометрический задатчик, коммутатор и обегающее устройство, которое через устройство набора программы соединено с коммутатором.
Благодаря такой конструкции упрощается процесс переналадки системы.
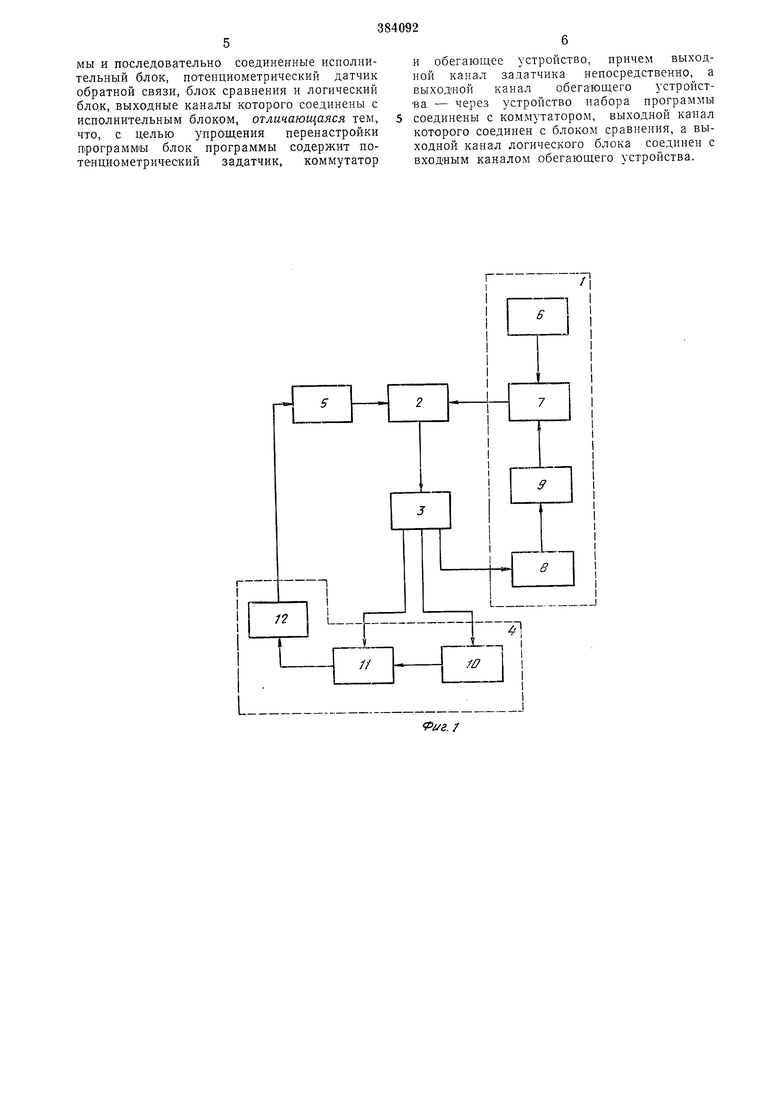
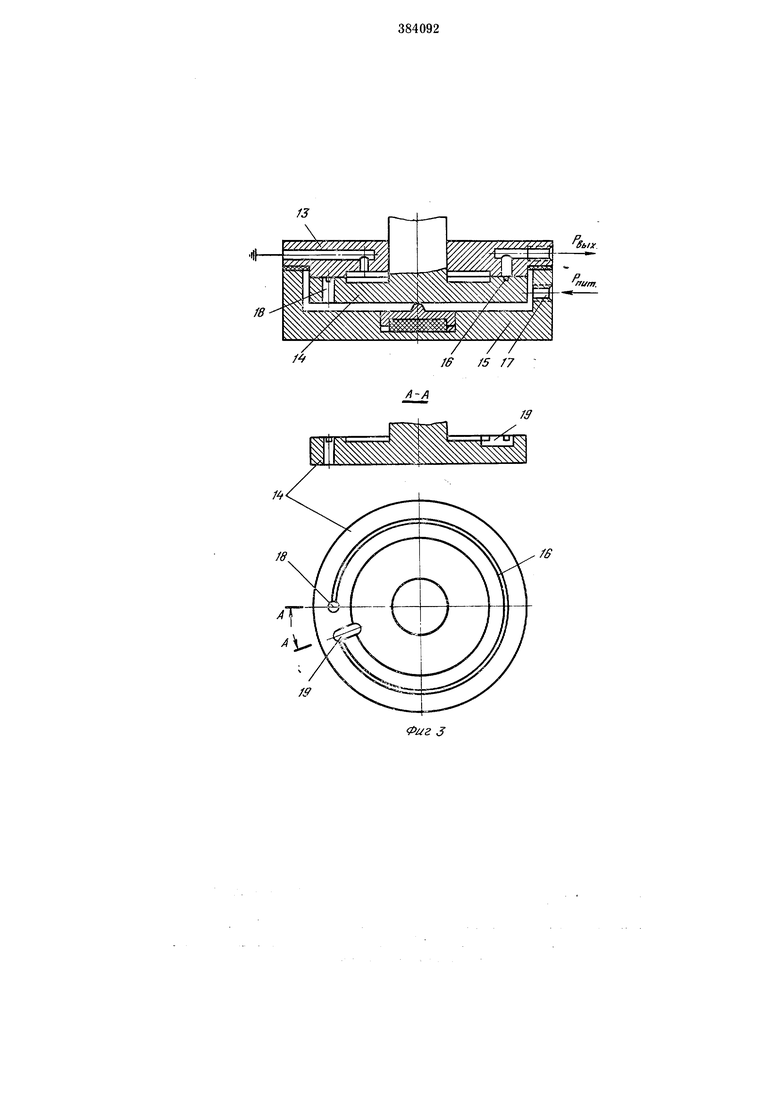
На фиг. 1 показана блок-схема пневмогидравлической системы программного управления; на фиг. 2 - функциональная схема системы; на фиг. 3 - пневмопотенциометрический преобразователь угла поворота в непрерывный аналоговый сигнал; на фИг. 4 -пневмопотенциометрический задатчик.
Система состоит из блока / программы, блоков сравнения 2 и логики 3, и исполнительного блока 4 с датчиком 5 обратной связи. Задатчик 6 соединен с одним из входов блока сравнения с помощью коммутатора 7, управляемые входы которого соединены с выходами обегающего устройства 8 через устройство 9 набора программы. Выход блока сравнения соединен с входом блока логики, а выходные каналы последнего соединены с входами обегающего устройства 8, гидростанции 10 и гидрораспределителя }}. Гидрораспределитель // соединен с гидроцилиндром 12 исполнительного органа, а последний кинематически связан с датчиком обратной связи, выход которого соединен со вторым входом блока сравнения.
Датчик 5 обратной связи (фиг. 3) выполнен в виде пневматического потенциометра и состоит из основания 13, золотника 14 и крышки 15. На рабочей полированной поверхности золотника 14 нанесена дросселирующая канавка 16. Сжатый воздух, подведенный через отверстие 17 в крышке 15, прижимает золотник М к основанию 13, обеспечивая уплотнение рабочей поверхности датчика, и через сквозное отверстие 18 в золотнике поступает на вход дросселирующей канавки. Конец дросселирующей канавки радиальным каналом 19 соединен с атмосферой. При вращении золотника 14 выходной канал в основании 13 перемещается по длине дросселирующей канавки. Таким образом, каждому угловому положению золотника относительно основания соответствует определенное значение давления на выходе датчика 5.
Задатчик 6 (фиг. 4) также представляет собой пневматический потенциометр, причем сечение и длина его дросселирующей канавки 20 равны сечению и длине дросселирующей канавки 16 датчика 5. Выходные каналы 21 задатчика 6 соединены с дросселирующей канавкой 20 через равные пром ежутки по ее длине. Для получения заданной характеристики задатчика в основании его установлены регулировочные винты 22 с шариками 23, воздействующими через эластичную прокладку 24 на профиль дросселирующей канавки 20 между соседними отводами. Выходные каналы 21 задатчика через Нормально закрытые контакты клапанов коммутатора соединены с вторым входом блока сравнения. Управляющие входы клапанов коммутатора 7 и выходные каналы обегающего устройства 8 связаны с устройством 9 набора программы.
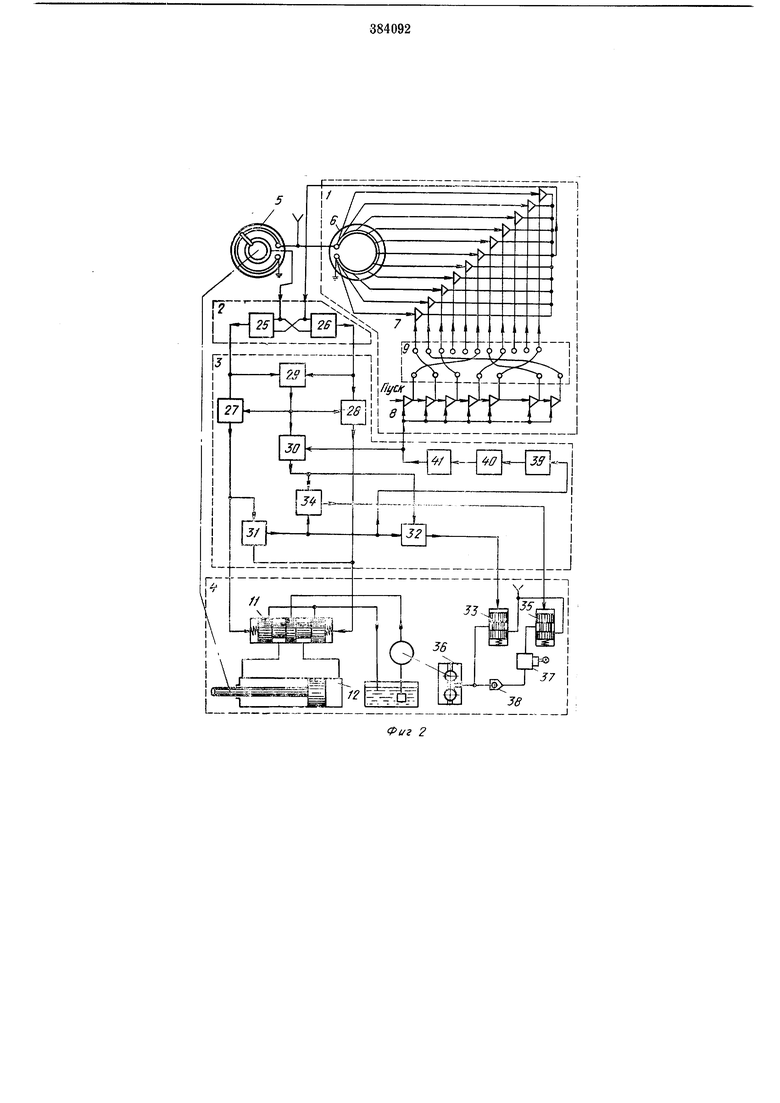
Блок 2 сравнения (фит. 2) состоит из двух элементов сравнения, камеры управления которых сообщены между собой взаимоинверсно, т. е. первый вход блока сравнения соединен с включающей камерой реле 25 сравнения и с выключающей камерой реле 26 сравнения, а второй вход блока сравнения - с выключающей камерой реле 25 сравнения и с включающей камерой реле 26 сравнения.
Выходы реле 25 и 26 сравнения связаны с входами элементов «Запрет 27 к 28 Е с входами элемента «И 29. Выход элемента «И 29 соедин-еп с включающим входом элемента «Память 30 и с запрещающими входами элементов «Запрет 27 и 28. Выходы элементов «Запрет 27 и 28 связаны с камерами управления гидрораспределителя 11 и с входами элемента 31 «ИЛИ. Выход элемента 31 «ИЛИ через прямой вход элемента 32 «Запрет соединен с входом пневмоусилителя 33, обеспечивающего включение привода на полную скорость. Выход элемента 30 «Память соединен с выключающим входом элемента 32 «Запрет и с одним из входов элемента 34 «И. Второй вход элемента 34 «И соединен с ВЫХОДОМ1 элемента 31 «ИЛИ, а выход- с входом пневмоусилителя 35, обеспечивающего включение привода на пониженную (маневровую) скорость. Для стабилизации маневровой скорости привода между пневмоусилителем 35 и входом пневмодвигателя 36 устачовлен стабилизатор 57 давления и обратный клапан 38. Выход элемента 31 «ИЛИ через инерционное звено 39 и элемент 40 «НЕ соединен с ВХОДОМ импульсатора 41. Выход импульсатора 41 соединен с управляющим входом обегающего устройства 8. Система работает следующим образом. Заданная программа перемещений исполнительного органа набирается в устройстве набора программы путем коммутации выходов
обегающего устройства с входами коммутатора (фиг. 2). После подачи команды «Пуск на первом выходе обегающего устройства появляется сигнал, под действием которого срабатывает один из клапанов ком мутатора. При этом на вход блока сравнения от задатчика поступает давление сжатого воздуха, величина которого определяет заданную позицию исполнительного органа. В блоке сравнения заданное значение давления сравнивается с текущим значением давления, поступающим от датчика обратной связи.
При наличии рассогласования величинами этих давлений срабатывает реле 25 или 26 (в зависимости от знака рассогласования). Например, если давление на выходе датчика больще заданного, срабатывает реле 25. При этом сигнал через элемент «Запрет 27 поступает на левый по схеме управляющий вход гидрораспределителя 11 и далее через элементы 31 «ИЛИ и 32 «Запрет - в управляющую камеру пневмоусилителя 33. Происходит включение привода на полную «рейсовую скорость и начинается перемещение исполнительного гидроцилиндра 12. Перемещение продолжается до тех пор, пока давление на выходе датчика 5 становится равным заданном у. В этом случае на обоих выходах блока сравнения имеется управляющий сигнад, под действием которого -срабатывает элемент «И 29. Последний выключает 27 и 28 «Запрет и включает элемент «Память 30. При этом гидрораспределитель 11 возвращается в нейтральное положение и выключается привод гидростанции.
Если после выключения привода перемещения происходит выбег исполнительного органа, давление на выходе датчика 5 становится меньще заданного. При этом элемент «И 29 выключается, снимается запрещающий сигнал с элементов «Запрет 27 и 28, и управляющий сигнал с элемента 28 поступает в правую по схеме управляющую камеру гидрораспределителя 11. Сигнал с выхода элемента 30 выключает элемент «Запрет 32 и через элемент «И 34 поступает на вход пневмюусилителя 35.
Происходит -реверсивное включение привода перемещения на пониженную (маневровую) скорость, обеспечивающую сведение к минимуму значения выбега при остановке.
В момент равенства давления на выходе датчика 5 заданному значению привод перемещения аналогичным образом выключается и с выдержкой времени т, определяемой звеном 39, включается элемент «НЕ 40, а следовательно и им пульсатор 41. Происходит выключение элемента 30 и продвижение обегающего устройства 8 на второй шаг.
Предмет изобретения
Пневмогидравлическая система программного управления, содержащая блок программы и последовательно соединенные исполнительный блок, потенциометрический датчик обратной связи, блок сравнения и логический бло:К, выходные каналы которого соединены с исполнительным блоком, отличающаяся тем, что, с целью упрощения перенастройки niporpaMMibi блок программы содержит потенциометрический задатчик, коммутатор
и обегающее устройство, причем выходной канал задатчика непосредственно, а выходной канал обегающего устройства - через устройство набора программы соединены с коммутатором, выходной канал которого соединен с блоком сравнения, а выходной канал логического блока соединен с входным каналом обегающего устройства.
f8
Sbix.
| название | год | авторы | номер документа |
|---|---|---|---|
| АМОРТИЗИРУЮЩЕЕ УСТРОЙСТВО РАБОЧЕГО ОБОРУДОВАНИЯ ПОГРУЗОЧНО-ТРАНСПОРТНОЙ МАШИНЫ | 1992 |
|
RU2012742C1 |
| Пневматическое устройство управления | 1983 |
|
SU1128223A1 |
| Пневматическое устройство управления многоприводным агрегатом | 1986 |
|
SU1355776A1 |
| О-ОСНАЯш.тЕн:во--Т1Х1!Н"Е; ш | 1973 |
|
SU367411A1 |
| УСТРОЙСТВО АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ БУРИЛЬИОЙ УСТАНОВКОЙ | 1973 |
|
SU368395A1 |
| СПОСОБ УПРАВЛЕНИЯ ЭЛЕКТРОГИДРАВЛИЧЕСКИМ СЛЕДЯЩИМ ПРИВОДОМ С МАШИННО-ДРОССЕЛЬНЫМ УПРАВЛЕНИЕМ | 2023 |
|
RU2815567C1 |
| Многоканальный регулятор | 1988 |
|
SU1564586A1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКОЕ УСТРОЙСТВО ДЛЯ РЕГУЛИРОВАНИЯ ДАВЛЕНИЯ | 1969 |
|
SU241137A1 |
| Многоканальный регулятор | 1982 |
|
SU1100606A1 |
| Устройство для управления гидравлическими силовыми исполнительными органами машин | 1978 |
|
SU960729A1 |

№
2/
Б-В
20
2ff
