1
Изобретен1ие отнооится к автоматизацни Tpyso-nioabeMHbix машин, а именно к устройствам ДЛ:Я утравлеяия приводом рабочего органа грузоподъемной машины, ваоример драглайна.
Известно устройство для управления прИводом рабочего органа грузолодъемнай машины, (Нанриме1р драглайна, включающее датчики нагрузки ;п1ри1водов подъема и тяпи. ОдЕа.ко это устройство ,не обеспечинает достаточно надежной работы.
Целью изобретения является повышение надежности работы у|СТройст1В1а.
Для этОГО к датчикам нагрузки приводов иодъема и тяги подключен KOMiHiapaTop, соединенный с мультивифатором и иот&н.цмальНЫ|М триггерОМ., выходы которого со1единены с управляющими базовыми п;епям1И триодов, ;подключенно1ло к да|Тчику нагрузки привода тяти ,ключ:а, выход которого соединен с запоминающиМ операционным усилителем с конденсатор ами «а ;входе и в обр атной связи, связанным в свою очередь, с одни1м из входов суммируюшего операционного усилителя, другим входом подключенного к датчику нйПрузки привода 1ТЯ1ГН, ,а 1выхо1д oniepiamHOHHoro усилителя соединен с приводом тяги.
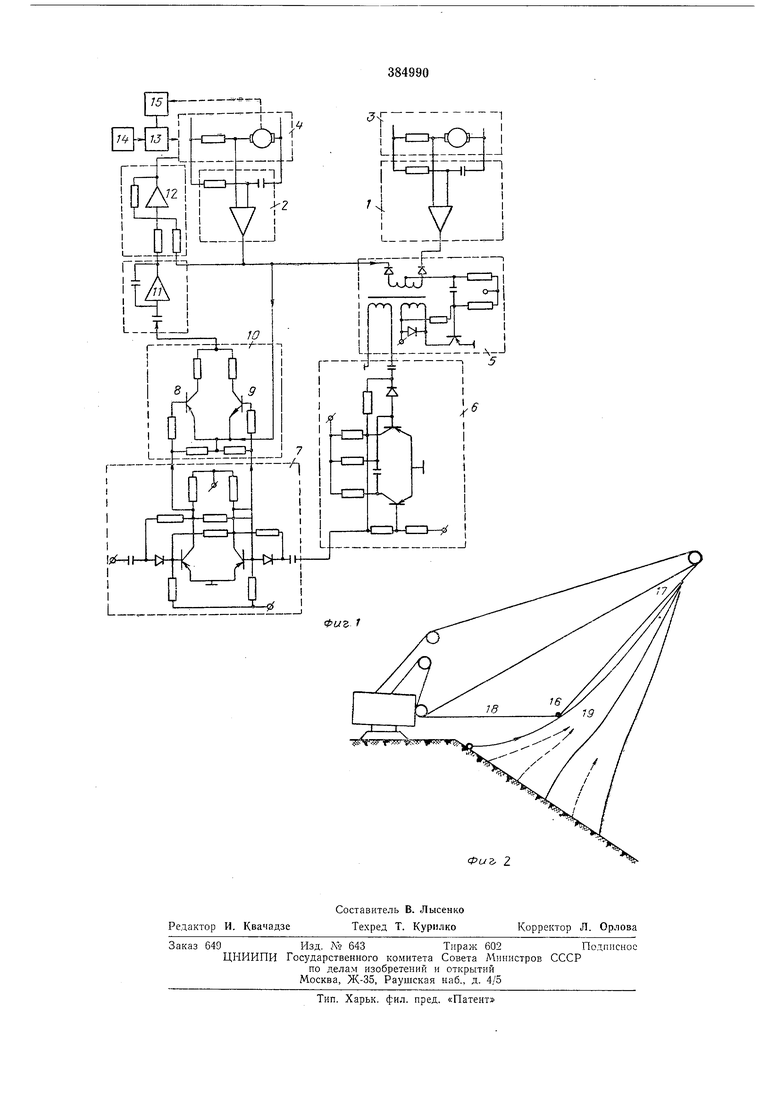
На фиг. 1 дана принципиальная схема устройства, на фиг. 2 - траектории транспортировки труза.
Устройство со стоит из датчиков /. и 2 нагрузки соответственно приводов 5 и 4 подъема тяги. Выходы датчиков нагрузки приводов подъема и тяги подключены к вхоД|а:М компаратор.а 5, выход которого соединен с мультивибратором 6, со,единенпы:м с потенциальным: триггером 7. Выходы потенциального триггера 7 соединены с упр.авляющим.и базовыми цепями триодов 8 н 9 ключа 10. Триоды 8 и 9 имеют различную проводимость. Выход ключа 10 соединен с заподашающим операционньгм уаил:ителе:м 11нс копденсятора.ми на входе и в цепи обратной связи.
. Выход датчика 2 нагрузки привода тяги подключен на один из входов суммирующего .операционного усилителя 12, выход которого 1подклю1чен на вход привода 4 тяги, а н-а другой ВХ10Д усилителя подключен выход запоми н.ающего операционного усилителя 11, н-а входной конденсатор которого через ключ 10 подключен выход |датч нка 2 н-ашрузки привода тяги.
Источники питания мультитаибр атора 6 и
потенциального триггер.а/электрически разделены с источни.ками питания остальных элементов устройства.
Hia вход пр ИВода 4 ТЯ|ГН подключен также выход органа 13 ср-авнения, на два входа которого подключены выходы элемента 14 задания и датчика 15 иеремещения, а вход послед:него 1сое,д/и№бн с выходЪм дрииода тя1пи.
Р.а-ботает устройство следующиМ о бразом.
После отрыва груза .16 от грунта усилие в .подъемНОм а анате 17 и нагрузка пр-изода -подъема превышает усилие в тяговом канате 18 и, следо1В ательно, и нагрузку тягового привода 4. Цри этом (выхадное натряжение датчика / на-прузки привода 5 подъема превыдаает -выходное напряжение датчЕка 2 привода тя.пи и на выходе колш ара-тор а 5 появляется -имлульс на.пряже(н«я, который переводит з.адержа нный :мультНВиб р. 6 в .неустойчиiBoe cocTOHHHie. По истечении выдержки, определЯемс-й .временем разряда кон-денсатор.а заде,рлса;нно-го мульти/вибратора 6 и подбираемой таК|Им образо-м, чтобы .величина этой выдерж-ки П|ре1вссход1ила время затухан-Ия .колебаний нагрузки привода тяги 4, -возяик.ающих д.р,и отрыве груза от грунта, .мультивибратор 6 В|0звр1а.щается -в устайч1ИВОе состоян.ие ,и на вход но-те нц:иального триггера 7 поступает он1ГНал .опрокидывающий три-ггер 7, а выхОиТное гнатряжение -тригге1р,а 7 за|ПИ1р.ает тр.иояы ключа 10, в результате чего на выходе запоминающего операционного (усилител.я // запоминается Иапряжевие, пр10.по.ри,иональное .иатрузке привода тяпи 4 после отрыва груза от :грунта. Это соответствует положению гр)-з.а на одной из кратч1айш1их тра«,кторий 19 его траНСПОрти.ровки к месту разгрузки :В пределах р.Ябсчей зоны.
Напряжение с выхода запомИ1нающего усилителя подается на втор.ой вход сум.лгирующего операционного 1ус.идител Я 12, на пе(рвый вход которого подается напряжение с выхода датчика -нагрузки 2 привода тяги, т. е. .на-пряжеиие, пропорциональное текущей величине нагрузки привода тяли 4 в процессе
трак|споргиро.. Если в продессе транспортировки груза 16 к месту .разгруз.ки, осушестзл.яемой у.мень.111.ен.ием длины .п-о.дъемн.ого каи.ата 17, нагрузка привода тяпи будет
отл-ичаться -.от -величины сигнал/а з.ап.о-ми.н:ающего усилителя 11, :на .выходе сумм.ирующего опера|ЦИ о:нного усилителя .12 появится сигнал, изменяющий скорость .сматывания тягового канагла та:ким образо.м, что -груз 16 возврашлется на требуемую к ратчаЙ щую траектор.ию. Эти тр|аек)Т10р.-ии лежат в предела х раб.очей зоны, поэтому благодаря по здерж.анию постоянной нагрузки пр-иво|да тяги в процессе транспор.т Ировки исключается выход груза 16 в (аварийные зоны.
Предмет изобретения
Устройство для управлепия приводом рабочего органа грузоподъемной машины, напр.нмер драглай.н.а, включающее датчики нагрузки Н ри;вад-ов подъема ,и тяги, отличающееся тбм, что, с целью по-вышен-ия надеж.пости работы устройства, .к датчикам нагруз.ки приводов .подъема и тяги п-одключен компаратор, соединенный с мультиви-братором и по-тенциальным три-ггером, выходы которого соединены с управляющими базовьши цепям.и триод.ов, п.одк-лючен,ного к датчику нагрузки п.рйвода тяпи ключа, выход -которого соединен с запоминающим операциопным ус илителем с К|О.Н1денса-тора.ми на вхо.де и в
обратной связи, связанным с о.дпи.м из входов суммирующего операционного усилителя, другим входом подключенного к датчику пагрузки привода тяги, а выход операционного уси/гителя соединен с приводом тяги.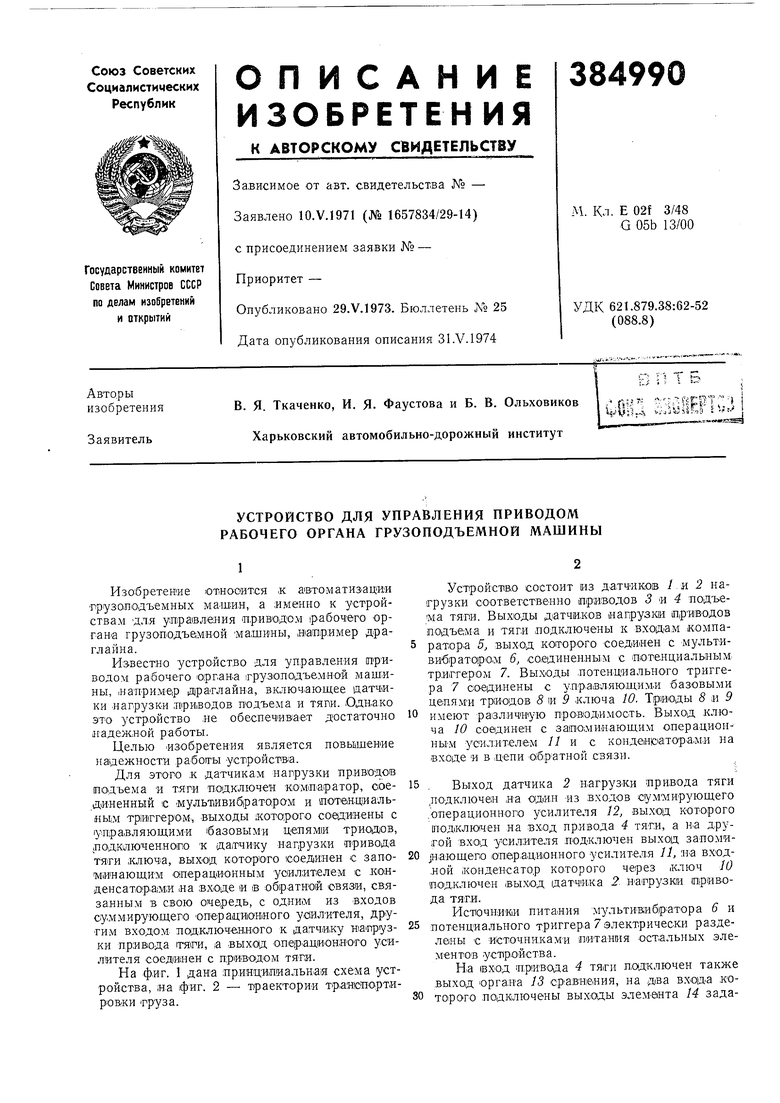
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для автоматической стабилизации положения рабочего органа строительной машины | 1983 |
|
SU1101525A2 |
| Устройство для автоматического управления рабочим органом землеройно-транспортной машины | 1985 |
|
SU1320349A1 |
| Устройство для автоматической стабилизации положения рабочего органа строительной машины | 1985 |
|
SU1244249A2 |
| Система автоматизированного управления транспортными перемещениями ковша экскаватора-драглайна | 1989 |
|
SU1788163A1 |
| Устройство для управления электрическим приводом тяги драглайна | 1975 |
|
SU717228A1 |
| СПОСОБ УПРАВЛЕНИЯ РАБОЧИМ ОРГАНОМ ЗЕМЛЕРОЙНО-ТРАНСПОРТНОЙ МАШИНЫ | 1997 |
|
RU2131961C1 |
| Устройство для автоматического управления рабочим органом землеройно-транспортной машины | 1988 |
|
SU1513091A1 |
| Устройство для взвешивания грузов в кузове автосамосвала | 1975 |
|
SU558173A1 |
| СТРОДЕЙСТВУЮЩИЙ БЕСКОНТАКТНЫЙ ЭКСТРЕМАЛЬНЫЙРЕГУЛЯТОР | 1965 |
|
SU172385A1 |
| Интегрирующее устройство с анало-гОВОй пАМяТью | 1976 |
|
SU842844A1 |