1
Изобретение относится к автоматическому управлению электроприводами и предназначено для управления электроприводом драглайна.
Известна, например, система автоматического управления электроприводами подъема и тяги драглайна для переноса грунта в отвал, содержащая два блока сравнения текущих длин подъемного и тягового канатов с их конечными значениями, к которым подключены реле, блок деления, усилители мощности, соединенные с соответствующими приводами, два интегратора, суммирующее устройство, соединенное с поляризованным реле, и пересчетное устройство 1.
Недостатком этого устройства является сложность реализации схемы устройства, сложность настройки, следовательно и эксплуатации, а также невозможность оперативного изменения положения траектории подъема ковша, положение подъема ковща, положение которой зависит от положения точки отрыва ковша, что необходимо при близком к стреле отвале для исключения возникновения аварии (при повороте машины ковщ, поднимаемый из дальних точек
забоя, может столкнуться с отвалом). Последнее снижает надежность управления, а также уменьшает производительность мащины из-за увеличения длительности цикла, поскольку при копании из дальних точек
забоя ковщ необходимо предварительно подтянуть до той точки отрыва, траектория подъема из которой не заходила бы в зону отвала.
Наиболее близким к изобретению по технической сущности и достигаемому результату является устройство для управления электроприводами тяги драглайна, содержащее питающие двигатели механизмов подъема и тяги преобразователи, соединенные последовательно два сельсин-датчика
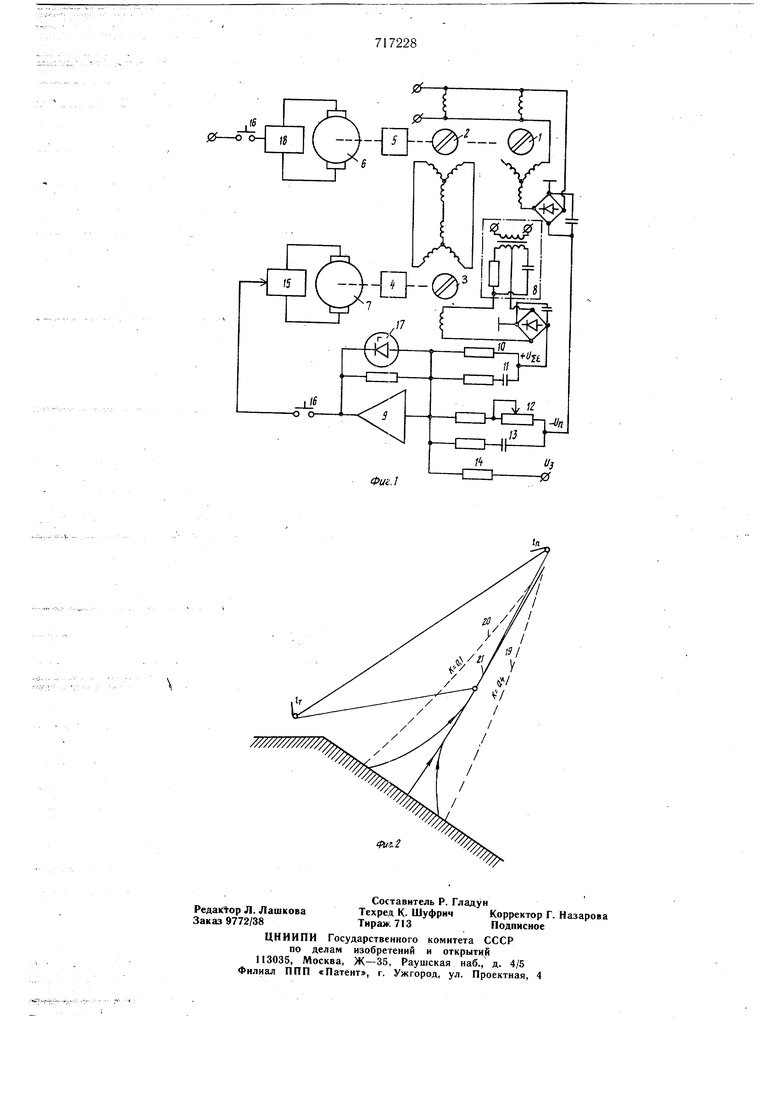
суммы длин подъемного и тягового канатов канала грубого отсчета, два соединенных последовательно сельсин-датчика канала точного отсчета, сельсин-датчик длины подъемного каната, сельсин-датчик длины тягового каната, включенные на выходах указанных датчиков четыре выпрямительных моста, три включенных между выходами выпрямительных мостов и входами возбудителей генераторов подъема и тяги однотактных магнитных усилителя, а также диодный логический элемент, включенный между выходами двух датчиков длины подъемного каната и длины тягового каната и выходом первого однотактного усилителя и источник постоянного напряжения 2. Это устройство обеспечивает защиту стрелы и блоков драглайна от ударов ковша и от динамических перегрузок в процессе транспортировки ковша, однако это устройство не обеспечивает высокой производительности и высокой надежности управления драглайна, особенно в сложных условиях работы (при близком к стреле отвале, в туман, ночью), поскольку в этих условиях возможно столкновение с близким к стреле отвалом поднимаемого ковша или его выходе в зону саморазгрузки, а это снижает надежность управления, требует от машиниста повышенного внимания и .увеличивает его утомляемость, вынуждает его переходить на понижение скорости транспортировки ковша, что снижает производительность драглайна. Цель изобретения - повышение надежности управления и производительности драглайна за счет автоматизации режима транспортировки ковша по требуемой траектории. Это достигается тем, что устройство снабжено регулируемым резисторным задатчиком положения траектории транспортировки ковша и фазосдвигающим мостом, включенным между выходом сельсин-датчиков суммы длин подъемного и тягового канатов и входом первого выпрямительного моста, а усилитель выполнен, операционным с включенным в цепи его обратной связи стабилитроном и входом подключен через резистор и конденсатор к выходу первого выпрямительного моста через регулируемый резисторный задатчик положения траектории транспортировки ковша и второй конденсатор - к выходу второго выпрямительного моста, а через второй резистор к источнику постоянного напряжения, при этом выход операционного усилителя подключен к питающему двигатель механизма тяги преобразователю. На фиг. 1 изображена принципиальная схема устройства; на фиг. 2 - траектории подъема ковша. Устройство имеет сельсин-датчики 1 - 3 измерения длины подъемного каната и суммы длин подъемного и тягового канатов, соединенные через понижающие редукторы 4, 5 с валами подъемного 6 и тягового 7 двигателей, углы поворота которых пропорциональны изменению длин канатов. Сельсин 1 включен по схеме индукционного датчика угла поворота пропорционального длине подъемного каната, причем для расширения пределов измерения обмотки сельсина включены по схеме автотрансформатора. Сельсины 2 и 3 включены последовательно по схеме суммирования углов поворота их роторов для измерения суммы длин подъемного и тягового канатов. Выход сельсин-датчика 3, последовательно с которым фазосдвигающий мост 8, подключен через выпрямительный мост на вход операционного усилителя 9 через резистор 10 и конденсатор 11. Выход сельсин-датчика 1 через выпрямительный мост подключен на вход усилителя через регулируемый резистор 12 и конденсатор 13. Через резистор 14 на вход усилителя подключен источник задающего напряжения, соответствующий минимально допустимому приближению ковша к стреле. Выход операционного усилителя 9 подключен к преобразователю 15, питающему двигатель 7 механизма тяги через кнопку 16. В цепь обратной связи операционного усилителя включен стабилитрон 17, ограничивающий выходное напряжение усилителя допустимым значением управляющего сигнала привода тяги и исключающий появление управляющего сигнала при положении ковша ниже заданной траектории. К преобразователю 18, питающему двигатель 6 механизма подъе.ма через кнопку 16, подключен максимальный управляющий сигнал, Устройство работает следующим образом. Положение траектории транспортировки ковша задается с помошью резисторного задатчика 12. При этом изменением сопротивления задатчика 12 можно легко изменить положение траектории в рабочей зоне от наиболее удаленной от стрелы траектория 19) до наиболее близкой к стреле (траектории 20). При увеличении сопротивления задатчика траектории приближаются к стреле, при уменьшении - удаляются. В начале цикла транспортировки из любой Точки забоя включается кнопка 16, замыкая выход усилителя 9 с преобразователем 15 привода тяги и подключая максимальный управляющий сигнал к преобразователю 18 привода подъема. Привод подъема включается на максимальную скорость, чем обеспечивается минимальная длительность цикла, а устройство управления приводом тяги автоматически обеспечивает движение ковша по заданной траектории без вмешательства машиниста, причем управляющий сигнал описывается следующим выражением: С (Еи + ет)М-() + -tnM),, где. (fn+IT); (Еп-Ь IT) UM-текущие и минимальные значения суммы длин подъемного и тягового канатов и длины подъемного каната; С - сигнал управления; К - коэффициент задания траектории; Ki - коэффициент зависимости сигнала управления С от длин канатов. Если С О, то это соответствует положению ковша на заданной траектории. Любой же уход ковша с заданной траектории вызывает отклонение нулевого значения выражения, стоящего в квадратных скобках, с соответствующим знаком «- или « + , в зависимости от того ниже или выще заданной траектории находится ковш. Набором соответствующей величины К можно задать любую траекторию транснортного ковша. Например, практически для любого типа драглайна положению траектории в рабочей зоне соответствуют значения К в пределах 0,1 ,4. Наиболее близкая к стреле траектория 20 соответствует К, равному 0,1. Наиболее удаленная траектория 19 {вдоль границы зоны разгрузки) соответствует К 0,4. Траектория 21 соответствует промежуточному значению КЕсли скорость подъемного каната во время движения позаданной траектории уменьщается, то и сигнал, поступающий с операционного усилителя 9 в привод тяги, уменьшается, не давая ковщу уйти с заданной траектории. Если необходимо регулировать скорость двигателя подъема, то кнопку 16 на входе преобразователя привода подъема можно исключить и задавать нужную скорость с помощью командоаппарата. Нодачей на вход усилителя 9 сигналов, пропорциональных первой производной регулируемых величин (через конденсаторы 11 и 13, последовательно с которыми стоят сопротивления, необходимые для уменьшения помех), создается скоростная отрицательная обратная связь в системе управления, что обеспечивает ее стабилизацию, исключает колебательность и перерегулирования, обеспечивая тем са.мым повышение надежности управления. Устройство выполняет автоматическое управление приводом тяги, обеспечивая движение ковша по выбранной из заданной указанным выше способом траектории без вмещательств машиниста в работу этого привода. Это облегчает работу машиниста и повышает надежность управления, поскольку обеспечивается стабильность траектории при разных циклах, исключается возможность отклонения от нее и приближение к а;варийным зонам, что особенно важно в сложных условиях работы (например, при близком к стреле отвале, в тумане, ночью). Кроме того, устройство обеспечивает возможность и в этих условиях осуществлять транспортировку ковща с максимальной скоростью, что способствует поддержанию производительности на максимальном уровне, а простота задания и изменение положения траектории в рабочей зоне с помощью регулируемого резисторного задатчика, который может быть установлен рядом с машинистом на пульте управления, делает работу удобной и несложной в эксплуатации, что повышает надежность управления. Формула изобретения Устройство для управления электрически.м приводом тяги драглайна, содержащее питающие двигатели механизмов подъема и тяги преобразователи, соединенные последовательно два сельсин-датчика суммы длин подъемного и тягового канатов, сельсиндатчик длины подъемного каната, включенные на выходах датчиков два выпрямительных м.рста, источник постоянного напряжения и усилитель, отличающееся тем, что, с целью повыщения надежности управления, и производительности драглайна за счет автоматизации режима транспортировки ковша по требуемой траектории, оно снабжено регулируемым резисторным задатчиком положения траектории транспортировки ковша и фазосдвигающим мостом, включенным между выходом сельсин-датчиков суммы длин подъемного и тягового канатов и входом первого выпрямительного моста, а усилитель выполнен операционным с включенным в цепи его обратной связи стабилрГтроном и входом подключен через резистор и конденсатор к выходу первого выпрямительного моста через регулируемый резисторный задатчик положения траектори-и транспортировки ковша и второй конденсатор - к выходу второго выпрямительного моста, а через второй резистор - к источнику постоянного напряжения, при этом выход операционного усилителя подключен к питающему двигатель .механизма тяги преобразователю. Источники информации, принятые во внимание при экспертизе 1.Тихобаев В, М. Схемы автоматического управления операцией переноса грунта в отвал для экскаваторов типа драглайн. - Сб. «Совершенствование параметров производственных процессов на открытых разработках,-М., «ЦНИИТЭИугля , 1964, с,15 21. 2.у вторское свидетельство СССР № 195077, кл. Е 02 F3/48, 1967 (прототип).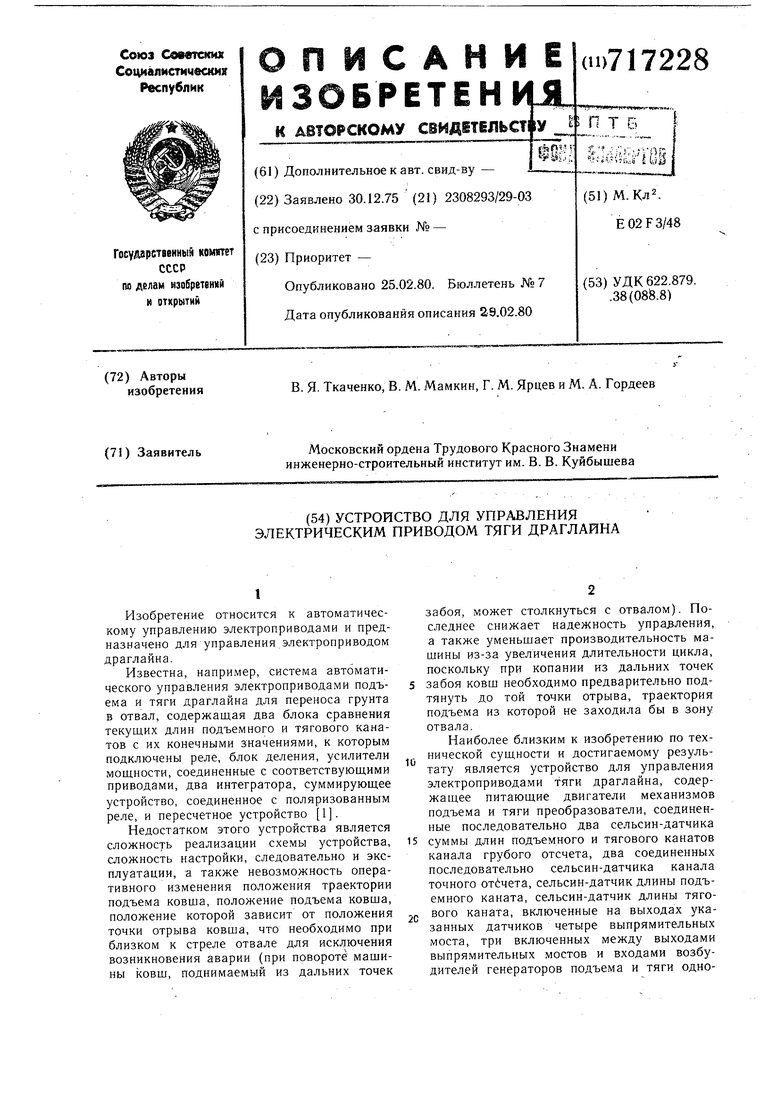
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ взаимного регулирования электроприводами подъема и тяги экскаватора-драглайна | 1977 |
|
SU736323A1 |
| Способ автоматического управления процессом транспортировки ковша драглайна | 1970 |
|
SU627219A1 |
| УСТРОЙСТВО для АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ПОЛОЖЕНИЕМ КОВША ОТНОСИТЕЛЬНО СТРЕЛЫ И БЛОКОВДРАГЛАЙНА | 1967 |
|
SU195077A1 |
| Устройство для управления механизмами подъема и тяги драглайна | 1978 |
|
SU874893A1 |
| Способ защиты драглайна от аварийных режимов при транспортировке ковша и устройство для его осуществления | 1978 |
|
SU744076A1 |
| Способ управления электрическими приводами драглайна и устройство для его осуществления | 1978 |
|
SU742542A1 |
| Экскаватор-драглайн | 1978 |
|
SU746049A2 |
| Устройство управления процессом транспортирования ковша драглайна | 1988 |
|
SU1544898A1 |
| ЭКСКАВАТОР-ДРАГЛАЙНI 2LQEC111ШШ-'^ЮЗНАЯ^'^лНй^1ЕСКА1 | 1972 |
|
SU338595A1 |
| Способ оптимального управления электроприводами драглайна | 1979 |
|
SU926163A1 |