1
Изобретение относится к области автоматического управления приводами при динамическом торможении асинхронного двигателя.
Известен асинхронный электропривод подъемной машины, содержащий аналого-дискретную систему управления контакторами ускорения, регулируемый источник постоянного тока для динамического торможения и датчик действительной скорости, В режиме динамического торможения изменение величины момента на валу двигателя производится при этом по двум каналам - плавным регулированием величины постоянного тока, подаваемого в статор двигателя, и ступенчатым изменением роторного сопротивления путем включения-отключения контакторов ускорения.
Недостатком этого привода является то, что устройство управления контакторами ускорения в функции скорости в режиме динамического торможения громоздко и недостаточно гибко.
Цель изобретения - повысить эффективность управления контакторами ускорения в режиме динамического торможения.
Для достижения этой цели к входу аналогодискретной системы управления подключены выходы измерительного элемента количества включенных контакторов ускорения и датчика действительной скорости. При этом измерительный элемент количества включенных
контакторов содержит несколько цепей из последовательно соединенных резистора и вентиля, причем один вывод каждой цепи подключен к нагрузке измерительного элемента, а другой - к цепи управления одного из контакторов ускорения.
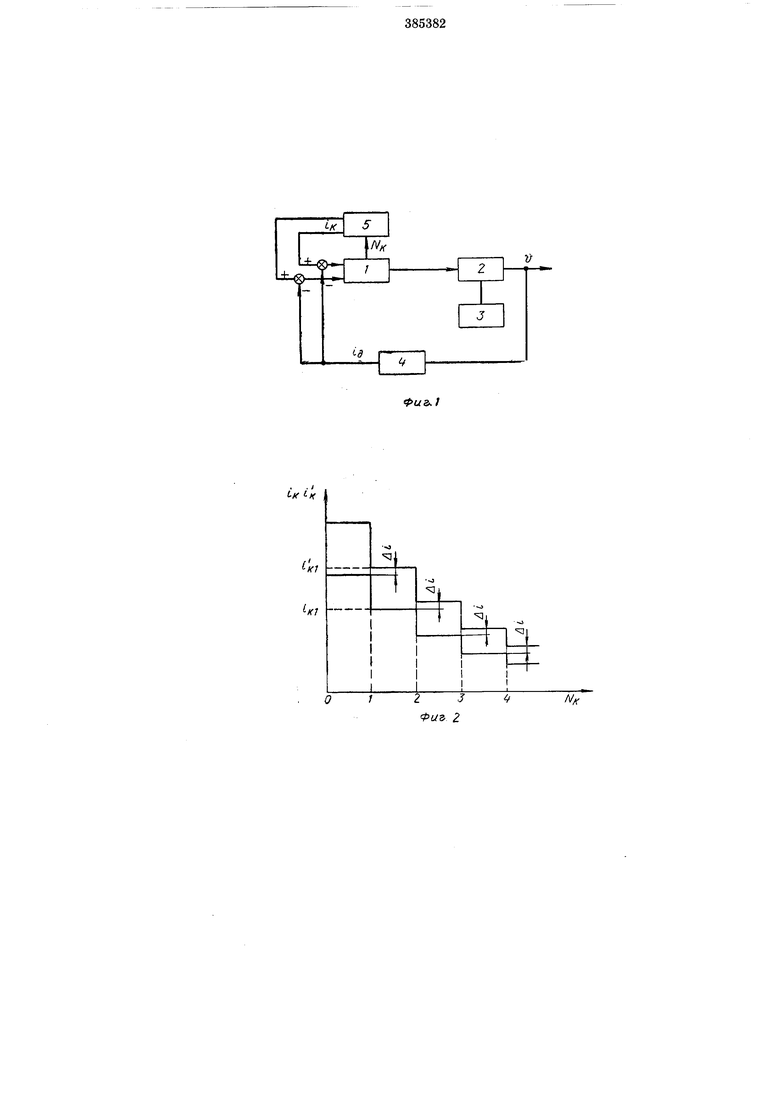
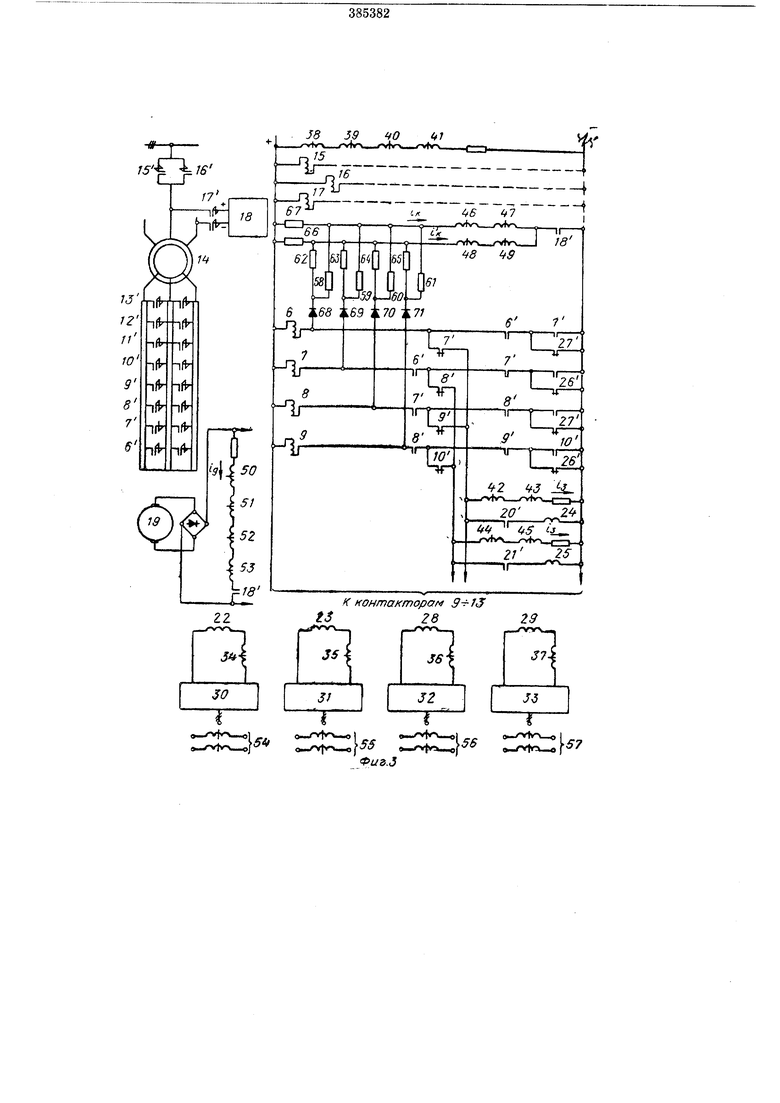
На фиг. 1 приведена блок-схема устройства; на фиг. 2 показан характер изменения сигналов IK и t,( в зависимости от количества
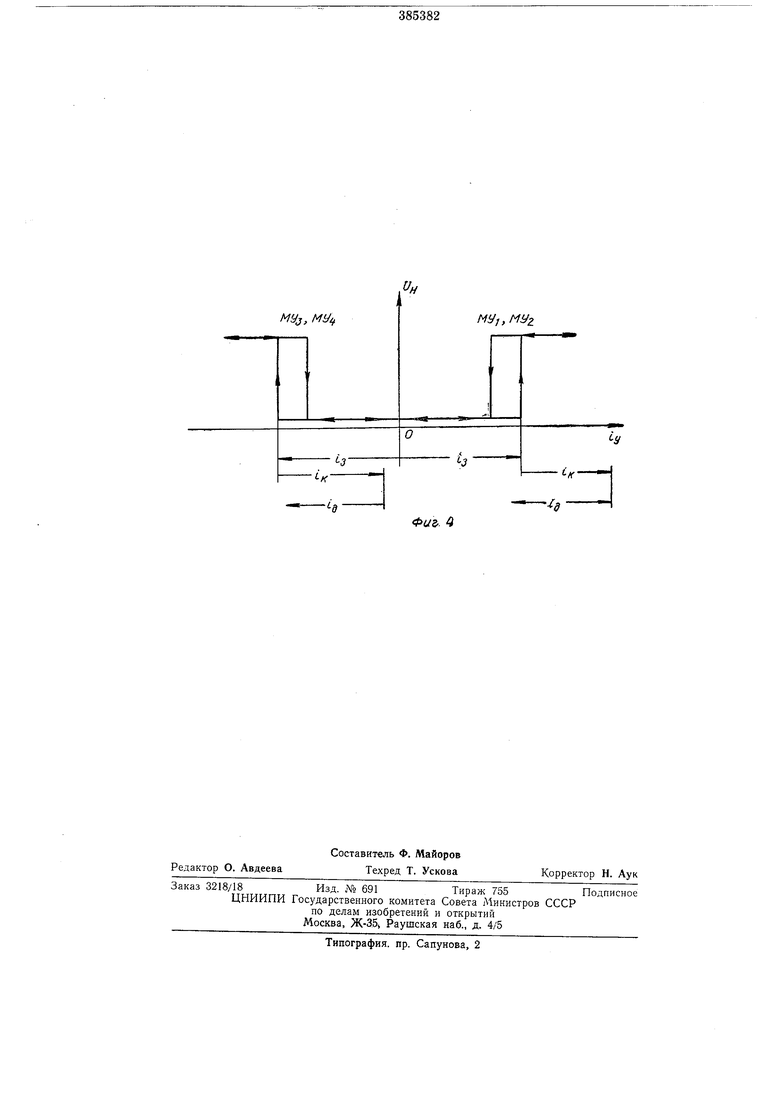
0 включенных контакторов; на фиг. 3 приведена принципиальная схема устройства, реализующего блок-схему,
где IK и IK--входные сигналы измерительного элемента; Лк - количество включенных
5 контакторов; V- скорость подъемной мащины; на фиг. 4 даны характеристики магнитных усилителей.
Устройство состоит из аналого-дискретной системы /, воздействующей на асинхронный
0 двигатель 2 вместе с регулируемым источником тока 3 для динамического торможения. К входу аналого-дискретной системы / подключены выход датчика действительной скорости 4 и выход измерительного элемента 5
5 количества включенных контакторов.
Устройство работает следующим образом. Но мере включения контакторов сигналы IK и Гк убывают ступенями, причем величины ступеней для каждого контактора выбирают0 ся индивидуально, но для всех ступеней практически соблюдается условие Д/; const (фиг. 2).
В момент включения динамического торможения сигналы IK, IK и 1д подключаются к входу аналого-дискретной системы. Сигнал IK действует в направлении включения контакторов, сигнал /к препятствует их отключению, сигнал 1д действует в направлении отключения контакторов и вычитается из сигналов IK и IK.
Предположим, что в рассматриваемый момент времени включен первый контактор. Тогда гк 1к, , а ,. Если сигнал гд уменьшится до величины IK,, то происходит включение контактора 7, если сигнал /д возрастет до величины IKI , то происходит отключение контактора 6. Таким образом, поскольку сигнал 1д является линейной функцией скорости, то управление роторной цепью двигателя производится по скорости, причем сопротивлению роторной цепи на каждой ступени сответствует определенный диапазон скоростей.
На фиг. 3 обозначены контакторы ускорения , подъемный двигатель 14, реверсивные контакторы 15 и 16, контактор динамического торможения 17, регулируемый источник постоянного тока 18, тахогенератор 19, реле 20 и 21 соответственно с катушками напряжения 22 и 23 и токовыми катушками 24 и 25, реле 26 и 27 с катушками напряжения 28 и 29, магнитные усилители аналого-дискретной системы 30, 31, 32 и 33 соответственно с обмотками управления положительной связи 34, 35, 36 и 37, смешения 55, 39, 40 и 41, задания 42, 43, 44 и 45, количества включенных контакторов 46-49, действительной скорости 50-5(3, реверсивными 54-57, резисторы 58- 67, диоды . На схеме приведены цепи управления только первых четырех контакторов, так как цепи управления остальных контакторов выполнены аналогично.
Схема работает следуюшим образом. Включение контакторов производится в направлении от 5 к 13, при этом контакторы 6, 8, 10, 12 включает реле 20, а контакторы 7, 9, 11, 13- реле 21. Отключение контакторов производится в направлении от 13 к 6, при этом контакторы 12, 10, 8, 6 отключают реле 27, а контакторы 13, 11, 9, 7 отключают реле 26. Реле 20, 21, 26 и 27 управляются соответственно магнитными усилителями 30, 31, 32 и 33. Магнитные усилители имеют релейные характеристики благодаря положительным обратным связям через обмотки 34, 35, 36 и 57. При подаче сигнала смещения в обмотки 38, 39, 40 ц. 41 v. отсутствии сигналов в остальных обмотках управления, магнитные усилители надежно удерживаются в «отключенном состоянии. Их характеристики для этого случая приведены на фиг. 4, где t/н - выходное напряжение усилителей, iy - ток управления. Вследствие включения контактора 17 обмотки 42 и 44 начинают обтекаться током через катушку контактора 6, и усилители 30 и 32 переводятся в режим готовности к срабатыванию. Одновременно через катушки контакторов , диоды
, резисторы , 67 и , 66 начинают обтекаться током IK обмотки 46 и 47 и током 1к обмотки 48 и 49, а обмотки
током д.
Предположим, что все обмотки имеют одинаковое число витков. Тогда при произойдет «включение усилителя 30 и соответственно реле 20. Реле 20 своим контактом шунтирует цепь обмоток 42 и 44, ток 1з обрашается в нуль, и усилитель 30 отключается. Однако реле 20 надежно удерживается во включенном состоянии токовой катушкой 24 до тех пор, пока не включится контактор 6, и катушка 24 не окажется также зашунтированной блок-контактом контактора. В момент включения контактора 6 диод 68 подпирается встречным потенциалом, образующимся за счет падения напряжения на обмотках , и протекавший через него ток обрашается в
нуль. В результате обращаются в нуль также составляющие токов IK и 1к, протекавшие соответственно через резисторы 58 и 62, и эти токи ступенчато уменьшаются до величины IK, и 1к,. Одновременно контактор 6 своим
блок-контактом подготавливает цепь включения контактора 7 и в зависимости от соотношения токов IK, 1к и 1д может произойти либо включение контактора 7 посредством магнитного усилителя 31 и реле 21, либо отключение
контактора 6 посредством магнитного усилителя 55 и реле 27. Управление остальными контакторами осуществляется аналогично. Минимальные величины токов IK и i определяются балластными резисторами 66 и 67.
Если применяется упрошенная аналого-дискретная система, регламентирующая только включение контакторов ускорения, то магнитные усилители 32 и 55, реле 26 и 27 отсутствуют. Соответственно упрошается и схема управления контакторами в режиме динамического торможения.
Предмет изобретения
1. Асинхронный электропривод подъемной машины, содержаший аналого-дискретную систему управления контакторами ускорения, регулируемый источник тока для динамического торможения и датчик действительной
скорости, отличающийся тем, что, с целью повышения эффективности управления контакторами ускорения в режиме динамического торможения, к входу аналого-дискретной системы управления подключены выход измерительного элемента количества включенных контакторов ускорения и выход датчика действительной скорости.
2. Асинхронный электропривод по п. 1, отличающийся тем, что измерительный элемент
количества включенных контакторов содержит несколько цепей из последовательно соединенных резистора и вентиля, причем один вывод каждой цепи подключен к нагрузке измерительного элемента, а другой - к цепи
управления одного из контакторов ускорения. 1328 .-.yvv- 6 ff7 /г контакторам 9-г ЛТ 29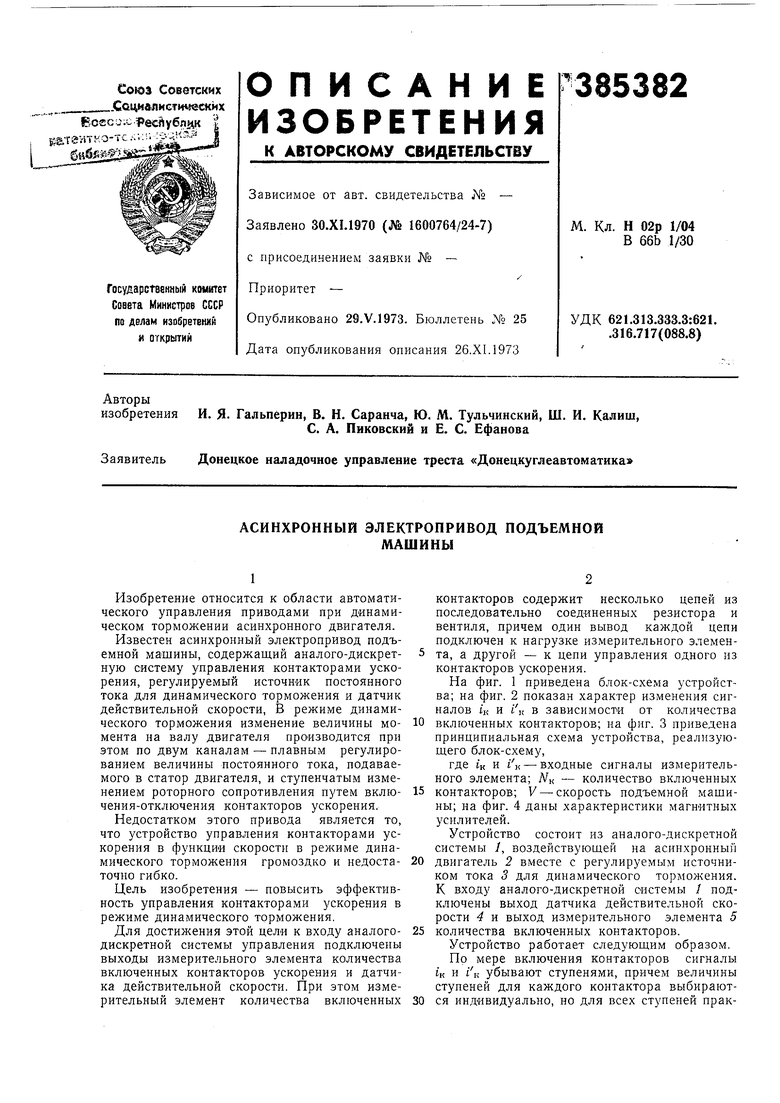
| название | год | авторы | номер документа |
|---|---|---|---|
| АВТОМАТИЗИРОВАННЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД ШАХТНОЙ ПОДЪЕМНОЙ УСТАНОВКИ | 1969 |
|
SU257583A1 |
| АНАЛОГО-ДИСКРЕТНАЯ СИСТЕМА УПРАВЛЕНИЯ АСИНХРОННЫМ ЭЛЕКТРОПРИВОДОМ | 1966 |
|
SU216082A1 |
| УСТРОЙСТВО ЗАЩИТЫ СИНХРОННЫХ ЭЛЕКТРОДВИГАТЕЛЕЙ ОТ АВАРИЙНЫХ РЕЖИМОВ РАБОТЫ | 2004 |
|
RU2286638C2 |
| Устройство контроля скорости синхронного двигателя и защиты его от асинхронного режима | 2020 |
|
RU2774920C2 |
| Тиратронное устройство для автоматического управления асинхронным двигателем | 1960 |
|
SU139412A1 |
| ЭЛЕКТРОПРИВОД МЕХАНИЗМА ПОВОРОТА ГРУЗОПОДЪЕМНОГО КРАНА | 2005 |
|
RU2298519C2 |
| Устройство для торможения асинхронного электродвигателя | 1982 |
|
SU1086532A1 |
| Устройство для динамического торможения асинхронного электродвигателя | 1985 |
|
SU1377996A1 |
| ЭЛЕКТРОПРИВОД | 2012 |
|
RU2531380C2 |
| Устройство для торможения трехфазного асинхронного электродвигателя | 1980 |
|
SU902184A1 |